1.本实用新型涉及led灯的加工设备,特别是涉及一种灯带锡焊贴条机。
背景技术:
[0002] led灯带是指把led灯珠组装在带状的fpc(柔性线路板)或pcb硬板上,呈条带状而得名,在led照明设备中已得到广泛应用。led灯带照明和装饰效果较好,因光源形状设计需要或一些大型led照明设备中需要将多条 led灯带电性连接,形成所需要的形状或增大光源面积。多条 led灯带电性连接一般是通过柔性导线带连接的,两者的相交处需要通过锡焊使两者电性连接。现有技术中,led灯的锡焊一般采用人工焊接,效率较低,并且人工操作难免出现漏焊、偏焊,焊接不牢固,甚至连接处脱落的问题,锡焊质量不高也不统一。也有采用机器焊接的,但是将led灯带逐条与导线带锡焊,焊接效率较低,无法实现自动化生产线。
技术实现要素:
[0003]
针对现有技术的不足之处,本实用新型提供一种灯带锡焊贴条机,其锡焊质量高且稳定统一,锡焊效率高,能形成自动化生产线。
[0004]
为达到上述之目的,本实用新型提供的技术方案是:一种灯带锡焊贴条机,包括工作台,所述工作台依次包括上料工位、锡焊工位和卸料工位,工作台设有与工位数相同层数的第一行走机构,每层第一行走机构连接有一工件托板,工作时各层第一行走机构的工件托板分别位于不同工位,各层的工件托板顺次走完全部工位后快速回退到上料工位;所述工件托板上设有多条平行的灯带定位槽,灯带定位槽与所述工作台长度方向平行,工件托板上还设有连接各灯带的导线带的定位机构和压锁机构,所述压锁机构设有多个联动的可打开和锁闭的翻转压头,翻转压头在所述锡焊工位锁闭,在卸料工位打开;所述锡焊工位设有锡焊装置,锡焊装置设有多个可做水平方向的纵横移动以及升降移动的焊枪,所述卸料工位设有可升降的吸头和解锁压锁机构的解锁装置,所述吸头在第二行走机构的驱动下实现行走。
[0005]
本实用新型的上述技术方案,设置多个工位的自动化生产线,各工位的行走机构相互独立,在上料工位将各灯带置于灯带定位槽定位,通过定位机构在灯带上放置柔性的导线带,再将压锁机构的翻转压头手动旋转压紧在导线带上,一直保持在卸料工位,直至卸料前由解锁装置解锁,再由吸头吸料、转送和卸料。除了上料为人工操作外,焊锡和转送贴条都由锡焊工位和卸料工位的工位装置自动完成,在锡焊工位各焊接部位由多个焊枪分别同时焊锡,焊接效率高,并且由于是程序控制机器完成,因而定位精准,焊点准确,能控制焊接程度,从而保证稳定统一的焊接质量,不易出现漏焊、偏焊,焊接不牢固的问题;在卸料工位将焊接好后的灯带组件转送到另一生产线上的灯板上进行贴条,因而能实现生产线式的自动化生产,生产效率高。
[0006]
进一步地,为使结构紧凑、传动效率高且降低成本,所述第一行走机构是三层皮带
机构,每层的皮带机构布置在工作台两侧且一一对应配置有导轨,每层的导轨通过滑块支承连接所述工件托板,该工件托板的两侧还与皮带机构的皮带连接,由皮带的往返移动带动工件托板的前行和后退。
[0007]
进一步地,作为更优的实施方式,所述工件托板上设有多条平行的灯带定位槽,灯带定位槽与工作台的长度方向平行,工件托板的尾端设置所述定位机构和压锁机构;所述定位机构包括多对定位柱,各对的两个定位柱之间留有放置导线带的间隔,多对定位柱形成的所述间隔构成定位导线带的间隔带,所述间隔带定位的导线带垂直并贯通所述灯带定位槽。
[0008]
进一步地,为减化结构,所述压锁机构包括转轴和多个l形的翻转压头,所述工件托板上设有穿过翻转压头的长孔,所述转轴通过支架安装在工件托板的下方,转轴与翻转压头的杆部固定连接,翻转压头的弯折部具有磁性能与工件托板吸附;当翻转压头的弯折部内翻而吸压在导线带上时,压锁机构锁闭,当翻转压头的弯折部外翻而趋向解锁。
[0009]
进一步地,为便于操作和解锁翻转压头,所述转轴上还固定安装有推杆,当压锁机构锁闭时,所述推杆穿过工件托板上所设的长孔而伸出于工件托板。
[0010]
进一步地,所述卸料工位的吸头安装在升降架上,升降架上设置有与该工位工件托板上所述推杆相对应的斜面推块,斜面推块由升降架带动下行且在所述吸头吸附前撞击所述推杆外翻,从而带动翻转压头外翻解锁。从而通过简单的结构实现解锁。
[0011]
进一步地,所述推杆的端部设有台阶,所述斜面推块为小端向下的梯形块,梯形块的斜面与所述台阶相对,斜面推块的下端位置低于所述吸头的下端位置。
[0012]
进一步地,为通过紧凑的结构实现升降架的行走、升降,所述卸料工位包括所述第二行走机构、架板、卸料升降机构和升降架,所述第二行走机构布置在卸料工位两侧,架板滑配在第二行走机构上并由第二行走机构驱动,卸料升降机构和升降架安装在架板上,升降架由卸料升降机构驱动实现升降,升降架上安装有所述吸头和所述解锁装置。
[0013]
进一步地,为以优化的方式实现卸料贴条,所述卸料工位设置有高于第一行走机构的架体,所述架体上设置所述第二行走机构,第二行走机构为皮带机构且垂直于第一行走机构布置,第二行走机构横跨过卸料工位的工作台以及旁侧平行的灯板生产线工作台,所述架板行走至灯板生产线工作台时,升降架下降卸料。
[0014]
进一步地,所述锡焊工位设置有龙门架,龙门架的两侧通过滑座安装在工作台两侧所设置的锡焊纵移机构上,龙门架在锡焊纵移机构的驱动下能沿工作台的长度方向移动;所述龙门架上安装所述锡焊装置,锡焊装置在锡焊横移机构的驱动下能沿龙门架的横梁方向移动,所述锡焊装置上设有锡焊升降机构,焊枪在锡焊升降机构的驱动下能作升降移动。
[0015]
综上所述,本实用新型的有益效果是:在锡焊工位各焊接部位由多个焊枪分别同时焊锡,焊接效率高,并且由于是程序控制机器完成,因而定位精准,焊点准确,能控制焊接程度,从而保证稳定统一的焊接质量,解决了漏焊、偏焊,焊接不牢固的问题;在卸料工位将焊接好后的灯带组件转送到另一生产线上的灯板上进行贴条,因而能实现生产线式的自动化生产,生产效率高。
附图说明
[0016]
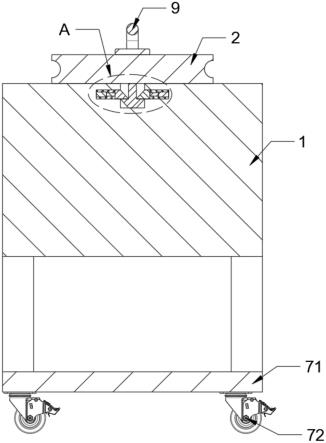
图1为本实用新型的结构示意图。
[0017]
图2为第一行走机构的结构示意图。
[0018]
图3为工件托板与第一行走机构的连接结构示意图。
[0019]
图4为工件托板的局部结构示意图。
[0020]
图5为图4的仰视方向结构示意图。
[0021]
图6为锡焊工位的结构示意图。
[0022]
图7为卸料工位的结构示意图。
[0023]
图8为图7主视方向的结构示意图。
具体实施方式
[0024]
如图1至图3所示,一种灯带3锡焊贴条机,包括工作台1,所述工作台1依次包括上料工位100、锡焊工位200和卸料工位300,以下也可分别对应称为第一工位、第二工位、第三工位。工作台1设有与工位数相同层数的第一行走机构10,每层第一行走机构10连接有一工件托板2,工作时各层第一行走机构10的工件托板2分别位于不同工位,各层的工件托板2顺次走完全部工位后快速回退到上料工位100。本实施例中的第一行走机构10是三层皮带机构,每层的皮带机构分别由一伺服电机驱动,每层的皮带机构布置在工作台1两侧且一一对应配置有导轨,皮带机构和导轨从第一工位延伸至第三工位,每层的导轨通过滑块23支承连接所述工件托板2。工件托板2包括组装在一起的托板框架21和面板22,滑块23安装在托板框架21的两侧,滑块23与导轨相滑配,在托板框架21底面的两侧还通过压块24与皮带机构的皮带11连接,如图3所示,皮带11平行地置于托板框架21的底面两侧,压块24的上表面为朝向皮带11的齿面,压块24通过螺栓将皮带11与托板框架21固定,从而实现皮带11驱动工件托板2前行和后退的往返移动。所述锡焊工位200设有锡焊装置203,锡焊装置203设有多个可做水平方向的纵横移动以及升降移动的焊枪206,所述卸料工位300设有吸头305和解锁压锁机构5的解锁装置,所述吸头305在第二行走机构20的驱动下实现行走。
[0025]
如图4和图5所示,所述工件托板2的面板22上设有多条平行的灯带定位槽221,灯带定位槽221与所述工作台1长度方向平行,面板22的尾端还设有连接各灯带3的导线带4的定位机构和压锁机构5,所述压锁机构5设有多个联动的可打开和锁闭的翻转压头52,翻转压头52在所述锡焊工位200锁闭,在卸料工位300打开。所述定位机构包括多对定位柱41,各对的两个定位柱41之间留有放置导线带4的间隔,多对定位柱41形成的所述间隔构成定位导线带4的间隔带,所述间隔带定位的导线带4垂直并贯通所述灯带定位槽221,导线带4置于多对定位柱41形成的间隔带而定位,导线带4与灯带3的相交处有焊接点7。为减化结构,所述压锁机构5包括转轴51和多个l形的翻转压头52,所述工件托板2上设有穿过翻转压头52的长孔,所述转轴51通过支架安装在工件托板2的下方,转轴51与翻转压头52的杆部固定连接,翻转压头52的弯折部521具有磁性能与工件托板2吸附;当翻转压头52的弯折部521内翻而吸压在导线带4上时,压锁机构5锁闭,当翻转压头52的弯折部521外翻而趋向解锁。
[0026]
如图1和图6所示,第二工位是锡焊工位200,设置有龙门架201,龙门架201的两侧通过滑座安装在工作台1两侧所设置的锡焊纵移机构202上,龙门架201在锡焊纵移机构202的驱动下能沿工作台1的长度方向移动,锡焊纵移机构202包括伺服电机、皮带机构和导轨,
其结构与第一行走机构10类似;所述龙门架201上安装有锡焊装置203,锡焊装置203在锡焊横移机构204的驱动下能沿龙门架201的横梁方向移动,所述锡焊装置203上设有锡焊升降机构205,焊枪206在锡焊升降机构205的驱动下能作升降移动。锡焊横移机构204和锡焊升降机构205均包括伺服电机、位移传动机构和导轨,此为现有技术,位移传动机构可以采用丝杆螺母副或齿轮齿条副等。
[0027]
如图4和图5所示,为便于操作和解锁翻转压头52,所述转轴51上还固定安装有推杆61,当压锁机构5锁闭时,所述推杆61穿过工件托板2上所设的长孔而伸出于工件托板2,所述推杆61的端部设有台阶,当工件托板2位于第三工位时,推杆61与升降架303上的解锁装置相对应。
[0028]
如图7和图8所示,所述卸料工位300包括所述第二行走机构20、架板301、卸料升降机构302和升降架303,所述卸料工位300设置有高于第一行走机构10的架体304,所述架体304上设置所述第二行走机构20,第二行走机构20为布置在架体304两侧的皮带机构和导轨,第二行走机构20垂直于第一行走机构10布置,皮带机构由伺服电机驱动,第二行走机构20横跨过卸料工位300的工作台1以及旁侧与工作台1平行的灯板生产线(未图示)。架板301滑配在第二行走机构20上并由第二行走机构20驱动,卸料升降机构302和升降架303安装在架板301上,升降架303由卸料升降机构302驱动实现升降,本实施例中,卸料升降机构302包括升降电机、丝杆螺母副和多个导杆,升降架303与卸料升降机构302连接,在升降架303上安装有向下的解锁装置和多个吸头305。
[0029]
解锁装置包括工件托板2上的推杆61,以及升降架303上设置的斜面推块62,斜面推块62为小端向下的梯形块,并且与第三工位工件托板2上的推杆61相对应,具体地,梯形块的斜面与推杆61上的台阶相对,斜面推块62的下端位置低于所述吸头305的下端位置。斜面推块62由升降架303带动下行且在所述吸头305吸附灯带组件前撞击所述推杆61外翻,从而带动翻转压头52外翻解锁,然后吸头305负压吸附灯带组件再由升降架303带动上行,架板301行走至灯板生产线的工作台上方时,升降架303下降,吸头305卸料至灯板上,进入贴条工序,然后架板301返回至第一行走机构10的第三工位吸附下一个灯带组件。
[0030]
本实用新型的上述技术方案,设置多个工位的自动化生产线,各工位的行走机构相互独立,除了上料为人工操作外,焊锡和转送贴条都由锡焊工位和卸料工位的工位装置自动完成,在锡焊工位各焊接部位由多个焊枪分别同时焊锡,焊接效率高,并且由于是程序控制机器完成,因而定位精准,焊点准确,能控制焊接程度,从而保证稳定统一的焊接质量,不易出现漏焊、偏焊,焊接不牢固的问题;在卸料工位将焊接好后的灯带组件转送到另一生产线上的灯板上进行贴条,因而能实现生产线式的自动化生产,生产效率高。
[0031]
以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。