1.本发明的实施例涉及一种机器人抓具,特别涉及一种电磁盒零件搬运与焊接共用机器人抓具。
背景技术:
2.机器人已经大批量应用的汽车生产制造中,例如喷涂、焊接、装配等。机器人只能做为载体,必需有对应的抓具才能实际应用。机器人具有很好的互换性,可以切换不同的抓具实现不同工艺的应用。一般常用的切换方式:1、定期手动更换抓具;2、采用自动换枪盘系统更换抓具。但这两种方式都需要切换时间,增加节拍,同时设备占用场地和设备成本也增加;在现有的电磁盒零件生产过程中,是采用定期手动更换抓具的方式进行,需要切换时间,增加了节拍,为此在生产电磁盒零件时需要进行将焊接和搬运集中在一个机器人抓具上,降低切换时间,降低节拍。
技术实现要素:
3.本发明的实施方式的目的在于提供一种电磁盒零件搬运与焊接共用机器人抓具,主要的目的是为了降低切换时间,降低节拍。
4.为了实现上述目的,本发明的实施方式设计了一种电磁盒零件搬运与焊接共用机器人抓具,其特征在于,包括:
5.框架,所述的框架作为所述的电磁盒零件搬运与焊接共用机器人抓具的固定支架;
6.焊接组件,所述的焊接组件固定在所述的框架的一侧;
7.第一气动夹紧机构,在所述的框架的另一侧的一端固定所述的第一气动夹紧机构;
8.第二气动夹紧机构,在所述的框架的另一侧的另一端固定所述的第二气动夹紧机构;
9.气动固定机构,在所述的第一气动夹紧机构和所述的第二气动夹紧机构之间的所述的框架上固定所述的气动固定机构;
10.连接法兰,在所述的框架上固定所述的连接法兰,所述的连接法兰连接机器人后,将所述的电磁盒零件搬运与焊接共用机器人抓具进行翻转,进行电磁盒零件搬运与焊接的切换。
11.进一步,所述的框架,还包括:
12.在所述的框架的中间位置设置一横梁;
13.在横梁的两端各固定一悬臂,将所述的第一气动夹紧机构和所述的第二气动夹紧机构在悬臂上相向固定;所述的第一气动夹紧机构和所述的第二气动夹紧机构的一端固定在横梁的一侧;
14.在横梁的上方固定支撑件;在支撑件的上方固定焊枪防撞器,在焊枪防撞器的上
方固定所述的焊接组件。
15.进一步,所述的第一气动夹紧机构,还包括:
16.在所述的框架上的悬臂的一侧上固定第一气缸的一端,在第一气缸的活塞杆上活动连接两个第一卡扣,第一卡扣的一端通过销轴活动连接在第一气缸连接块上;
17.在第一气缸的一侧,在悬臂的下方固定第一定位支撑块的一端,第一定位支撑块的另一端上设置第一卡槽用于定位工件。
18.进一步,所述的第二气动夹紧机构,还包括:
19.在所述的框架上的悬臂的一侧上固定第二气缸的一端,在第二气缸的活塞杆上活动连接两个第二卡扣,第二卡扣的一端通过销轴活动连接在第二气缸连接块上;
20.在第二气缸的一侧,在悬臂的下方固定第二定位支撑块的一端,第二定位支撑块的另一端上设置第二卡槽用于定位工件。
21.进一步,所述的气动固定机构,还包括:
22.在所述的框架上的横梁的一侧上,靠近所述的焊接组件的一侧,固定第三气缸的一端;第三气缸的活塞杆通过销轴与设置在下方的卡钩活动连接,卡钩的一端通过销轴连接在第三气缸的驱动连接块上,第三气缸通过伸缩驱动卡钩张开和锁紧。
23.进一步,所述的焊接组件,还包括:
24.焊枪防撞器连接在所述的框架的支撑件的一端;焊枪通过第一支架与焊枪防撞器的活动连接。
25.进一步,所述的焊枪为mig焊枪。
26.进一步,所述的框架上方电气控制箱,在电气控制箱内设置所述的电磁盒零件搬运与焊接共用机器人抓具的动作控制系统。
27.进一步,在所述的框架的一端的下方固定第二支架,在第二支架的下方固定扫码感应器,用于扫描并读取工件上的dmc码。
28.进一步,在所述的第三气缸的一侧通过支撑条固定感应器。
29.本发明的实施方式同现有技术相比,在框架的两侧分别设置了焊接组件和第一气动夹紧机构、第二气动夹紧机构、气动固定机构;在焊接时使用焊接组件,在搬运时,使用第一气动夹紧机构、第二气动夹紧机构、气动固定机构,实现焊接和搬运两种功能集中在一个抓手上,起到不需要进行两种不同工艺的抓手的切换,起到降低切换时间,降低节拍的作用。
附图说明
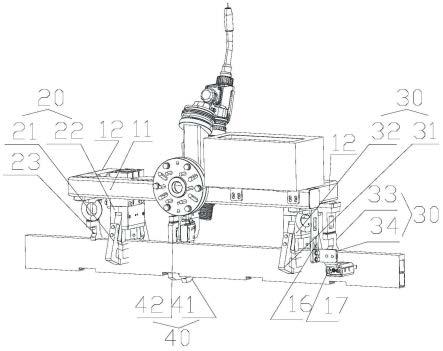
30.图1为本发明的立体结构示意图;
31.图2为图1的主视方向的示意图;
32.图3为图1的俯视方向的示意图;
33.图4为图1的左视方向的示意图。
具体实施方式
34.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,
为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
35.本发明的第一实施方式涉及一种电磁盒零件搬运与焊接共用机器人抓具,如图1、图2、图3、图4所示,包括:
36.框架1作为本实施例中电磁盒零件搬运与焊接共用机器人抓具的固定支架;用于支撑和固定其他的部件。
37.焊接组件10固定在框架1的一侧;焊接组件10主要用于电磁盒零件的焊接工作,所以将焊接组件10与框架1的一侧的固定,方便机器人到时用于翻转。
38.在框架1的另一侧的一端固定第一气动夹紧机构20;在框架1的另一侧的另一端固定第二气动夹紧机构30;第一气动夹紧机构20和第二气动夹紧机构30用于夹取和固定工件6。
39.在第一气动夹紧机构20和第二气动夹紧机构30之间的框架1上固定气动固定机构40;气动固定机构40用于勾住工件6;第一气动夹紧机构20、第二气动夹紧机构30和气动固定机构40能够起到拾取、夹取以及固定工件6的作用。
40.同时在框架1上固定连接法兰2,连接法兰2主要是将整个的电磁盒零件搬运与焊接共用机器人抓具通过连接法兰2,安装在机器人的手臂上,用于控制整个的电磁盒零件搬运与焊接共用机器人抓具。连接法兰2连接机器人后,将电磁盒零件搬运与焊接共用机器人抓具进行翻转,进行电磁盒零件搬运与焊接的切换。利用机器人安装整个的电磁盒零件搬运与焊接共用机器人抓具,在框架1的两侧分别设置了焊接组件10和第一气动夹紧机构20、第二气动夹紧机构30、气动固定机构40;在焊接时使用焊接组件10,在搬运时,使用第一气动夹紧机构20、第二气动夹紧机构30、气动固定机构40,通过机器人将整个的电磁盒零件搬运与焊接共用机器人抓具进行翻转,从而实现焊接和搬运两种功能集中在一个抓手上,起到不需要进行两种不同工艺的抓手的切换,起到降低切换时间,降低节拍的作用,解决了现有技术中两种不同工艺的抓手需要切换的技术问题,具有成本低,节约切换时间,降低节拍的技术效果。
41.为了实现上述的技术效果,如图1、图2、图3、图4所示,框架1,还包括:
42.在框架1的中间位置设置一横梁11;横梁11作为框架1的横向固定结构,主要是起到承重的作用。
43.在横梁11的两端各固定一悬臂12,将第一气动夹紧机构20和第二气动夹紧机构30在悬臂12上相向固定;第一气动夹紧机构20和第二气动夹紧机构30的一端固定在横梁11的一侧;
44.在横梁11的上方固定支撑件13;在支撑件13的上方固定焊枪防撞器14,在焊枪防撞器14的上方固定焊接组件10。框架1作为本实施例中电磁盒零件搬运与焊接共用机器人抓具的固定支架;用于支撑和固定其他的部件,起到支撑的作用。
45.为了实现上述的技术效果,如图1、图2、图3、图4所示,第一气动夹紧机构20,还包括:
46.在框架1上的悬臂12的一侧上固定第一气缸7的一端,在第一气缸7的活塞杆上活动连接两个第一卡扣21,第一卡扣21的一端通过销轴活动连接在第一气缸连接块22上;
47.在第一气缸7的一侧,在悬臂12的下方固定第一定位支撑块23的一端,第一定位支撑块23的另一端上设置第一卡槽24用于定位工件6。
48.同样,为了实现上述的技术效果,如图1、图2、图3、图4所示,第二气动夹紧机构30,还包括:
49.在框架1上的悬臂12的一侧上固定第二气缸8的一端,在第二气缸8的活塞杆上活动连接两个第二卡扣31,第二卡扣31的一端通过销轴活动连接在第二气缸连接块32上;
50.在第二气缸8的一侧,在悬臂12的下方固定第二定位支撑块33的一端,第二定位支撑块33的另一端上设置第二卡槽34用于定位工件6。
51.上述的结构,在搬运工件6时,利用第一气缸7和第二气缸8驱动第一卡扣21和第二卡扣31将工件6夹持住,从而进行搬运,为了使得工件6能够在夹持的过程中,被定位,在第二定位支撑块33设置了第二卡槽34将工件6在夹持的过程中进行定位。
52.同时,为了在夹取过程中能够顺利进行,如图1、图2、图3、图4所示,气动固定机构40,还包括:
53.在框架1上的横梁12的一侧上,靠近焊接组件10的一侧,固定第三气缸4的一端;第三气缸4的活塞杆通过销轴与设置在下方的卡钩41活动连接,卡钩41的一端通过销轴连接在第三气4缸的驱动连接块42上,第三气缸4通过伸缩驱动卡钩41张开和锁紧。
54.上述的结构,能够起到将工件6进行定位夹取等工作,实施例中的整个的电磁盒零件搬运从而实现焊接搬运的技术功能。
55.为了实现焊接的功能,如图1、图2、图3、图4所示,焊接组件10,还包括:
56.焊枪防撞器14连接在框架1的支撑件13的一端;焊枪3通过第一支架15与焊枪防撞器14的活动连接,使得焊枪3能够在焊枪防撞器14上下移动,从而使得焊枪3获得一定的移动空间,在焊接的时候具有一定的柔性,在本实施例中的焊枪3采用了mig焊枪。
57.为了对于本实施例中的电磁盒零件搬运与焊接共用机器人抓具实现电气的连接,框架1上方电气控制箱9,在电气控制箱9内设置电磁盒零件搬运与焊接共用机器人抓具的动作控制系统。
58.为了方便读取dmc码,如图1所示,在框架1的一端的下方固定第二支架16,在第二支架16的下方固定扫码感应器17,用于扫描并读取工件上的dmc码。主要起到记录产品的dmc码的作用,后续能够起到追溯产品的作用。
59.如图2所示,在第三气缸4的一侧通过支撑条18固定感应器5。感应器5起到感应工件6的作用,能够使得感应工件6早夹取的过程中保证其位置正确。
60.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
