技术特征:
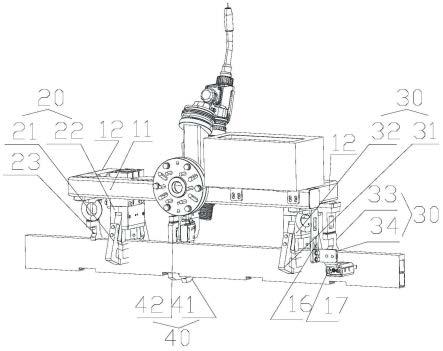
1.一种电磁盒零件搬运与焊接共用机器人抓具,其特征在于,包括:框架,所述的框架作为所述的电磁盒零件搬运与焊接共用机器人抓具的固定支架;焊接组件,所述的焊接组件固定在所述的框架的一侧;第一气动夹紧机构,在所述的框架的另一侧的一端固定所述的第一气动夹紧机构;第二气动夹紧机构,在所述的框架的另一侧的另一端固定所述的第二气动夹紧机构;气动固定机构,在所述的第一气动夹紧机构和所述的第二气动夹紧机构之间的所述的框架上固定所述的气动固定机构;连接法兰,在所述的框架上固定所述的连接法兰,所述的连接法兰连接机器人后,将所述的电磁盒零件搬运与焊接共用机器人抓具进行翻转,进行电磁盒零件搬运与焊接的切换。2.根据权利要求1所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的框架,还包括:在所述的框架的中间位置设置一横梁;在横梁的两端各固定一悬臂,将所述的第一气动夹紧机构和所述的第二气动夹紧机构在悬臂上相向固定;所述的第一气动夹紧机构和所述的第二气动夹紧机构的一端固定在横梁的一侧;在横梁的上方固定支撑件;在支撑件的上方固定焊枪防撞器,在焊枪防撞器的上方固定所述的焊接组件。3.根据权利要求1所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的第一气动夹紧机构,还包括:在所述的框架上的悬臂的一侧上固定第一气缸的一端,在第一气缸的活塞杆上活动连接两个第一卡扣,第一卡扣的一端通过销轴活动连接在第一气缸连接块上;在第一气缸的一侧,在悬臂的下方固定第一定位支撑块的一端,第一定位支撑块的另一端上设置第一卡槽用于定位工件。4.根据权利要求1所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的第二气动夹紧机构,还包括:在所述的框架上的悬臂的一侧上固定第二气缸的一端,在第二气缸的活塞杆上活动连接两个第二卡扣,第二卡扣的一端通过销轴活动连接在第二气缸连接块上;在第二气缸的一侧,在悬臂的下方固定第二定位支撑块的一端,第二定位支撑块的另一端上设置第二卡槽用于定位工件。5.根据权利要求1所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的气动固定机构,还包括:在所述的框架上的横梁的一侧上,靠近所述的焊接组件的一侧,固定第三气缸的一端;第三气缸的活塞杆通过销轴与设置在下方的卡钩活动连接,卡钩的一端通过销轴连接在第三气缸的驱动连接块上,第三气缸通过伸缩驱动卡钩张开和锁紧。6.根据权利要求1所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的焊接组件,还包括:焊枪防撞器连接在所述的框架的支撑件的一端;焊枪通过第一支架与焊枪防撞器的活动连接。
7.根据权利要求6所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的焊枪为mig焊枪。8.根据权利要求1所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,所述的框架上方电气控制箱,在电气控制箱内设置所述的电磁盒零件搬运与焊接共用机器人抓具的动作控制系统。9.根据权利要求8所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,在所述的框架的一端的下方固定第二支架,在第二支架的下方固定扫码感应器,用于扫描并读取工件上的dmc码。10.根据权利要求5所述的电磁盒零件搬运与焊接共用机器人抓具,其特征在于,在所述的第三气缸的一侧通过支撑条固定感应器。
技术总结
本发明涉及一种电磁盒零件搬运与焊接共用机器人抓具,包括:框架作为电磁盒零件搬运与焊接共用机器人抓具的固定支架;焊接组件固定在框架的一侧;在框架的另一侧的一端固定第一气动夹紧机构;在框架的另一侧的另一端固定第二气动夹紧机构;在第一气动夹紧机构和第二气动夹紧机构之间的框架上固定气动固定机构;在框架上固定连接法兰,连接法兰连接机器人后,将电磁盒零件搬运与焊接共用机器人抓具进行翻转,进行电磁盒零件搬运与焊接的切换;本发明的实施方式在焊接时使用焊接组件,在搬运时,使用第一气动夹紧机构、第二气动夹紧机构、气动固定机构,实现焊接和搬运两种功能集中在一个抓手上,起到降低切换时间,降低节拍的作用。用。用。
技术研发人员:陈刚
受保护的技术使用者:上海君屹工业自动化股份有限公司
技术研发日:2021.03.02
技术公布日:2022/9/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。