技术特征:
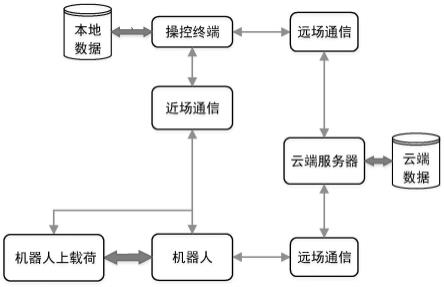
1.一种面向大数据的四足仿生机器人综合操控系统,其特征在于,该系统包括操控终端、本地数据库、近场通信设备、机器人及其上载荷、远场通信设备、云端服务器和云端数据库;操控终端为手柄接触式操控终端;在机器人上部署近场通信设备,手柄接触式操控终端通过近场通信连接机器人上近场通信设备,采用多种操控方式收发对机器人及其上载荷的指令,并接收机器人及其上载荷反馈的信息和回传的视频和图像,将机器人及其上载荷的相关数据存储在本地数据库;在机器人上和手柄接触式操控终端部署远场通信设备,在云端服务器上部署远场通信设备,手柄接触式操控终端、机器人通过远场通信连接云端服务器;手柄接触式操控终端按照一定的规则协议向云端服务器上传操控终端数据,手柄接触式操控终端通过近场通信控制机器人行走、作业的相关数据上传云端服务器,云端服务器将接收的数据存储在云端数据库;云端服务器,部署在网络上,用于远程接入、数据存储、数据分析、综合展示、信息管控和远程控制机器人,用户通过云端服务器获取机器人的相关数据,对云端服务器进行操控,并远程对机器人进行操控。2.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述近场通信设备是由wifi客户端和wifi路由器组成互连的一套对应设备,或由wifi客户端、成套的图数传电台、路由器组成的一套对应设备。3.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述远场通信设备是由wifi客户端、成套的远距离图数传电台、路由器组成的一套对应设备,或由手柄接触式操控终端、机器人和云服务器上部署的公网或私网4g/5g通讯装置组成对应的设备。4.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述多种操控方式包括手柄接触式操控终端直接连接机器人并通过手柄收发指令,通过语音、视觉、手环手势连接手柄接触式操控终端进而收发指令,以及通过在机器人身上部署视觉相机,直接采集操控人员的动作进行控制。5.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述指令包括控制机器人蹲起、站立、行走、跑跳的指令,控制机器人上机械臂抓取、移动、放置指令,控制危险物检测启动的指令,以及控制视频获取和回传图像的指令。6.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述反馈的信息包括机器人当前定位、行走步态、速度、关节位置的期望值和实际值、关节扭矩的期望值和实际值,告警故障信息,以及其上载荷的告警信息如人脸识别、危险物识别、险情识别、机械臂的判断。7.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述回传的视频和图像包括机器人上可见光、红外视频和激光雷达点云图像。8.如权利要求1所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,机器人及其上载荷的告警、监听信息等经由近场通信方式直接反馈至手柄接触式操控终端的ui界面上;而机器人及其上载荷的视频/图片、感知和地图信息经由近场通信回传至手柄接触式操控终端,手柄接触式操控终端对其进行解码后显示在终端的ui界面上。9.如权利要求1-8任一项所述的面向大数据的四足仿生机器人综合操控系统,其特征
在于,该系统从操控到底层驱动包括五层,分别是操控访问层、交互层、业务层、数据层和硬件设备层,在交互层和业务层间采用权限控制,在操控访问层、数据层和硬件设备链路都与云端服务器进行连接和数据交互;操控访问层为手柄接触式操控终端及其上对应机器人和载荷操控的相关软件,是整个操控系统功能的体现,包括手柄接触式操控、语音操控、设备手势操控和视觉操控;交互层所指为对操控访问层的指令进行分析、模块调用、指令的发送接收、协议接口的确定和调用,包括模块引擎、发送/接收模块和http/socket协议;业务层所指为机器人及其上载荷具体完成的功能,包括连接、当前状态获取、行为、机器人的移动、前方目标识别、路径规划、机器人定位、机器人自主行走,跟随动作、载荷控制的相关作业动作,机器人及其上载荷的安全信息和作业告警信息;数据层所指为各种数据库,包括收发的数据交互池、指令交互池,调用硬件上的函数库、对硬件进行事件监听的数据库、以及与硬件相连的通信链路库;硬件设备是指为机器人上的各种设备,包括机器人本体、机身上载荷、网络通信设备、视觉设备、雷达设备和危险物辨识设备。10.如权利要求9所述的面向大数据的四足仿生机器人综合操控系统,其特征在于,所述权限控制为身份用户的识别控制、交互层调用控制、业务分发流程和反馈的的权限控制。
技术总结
本发明涉及一种面向大数据的四足仿生机器人综合操控系统,属于四足仿生机器人领域。本发明在操控模式上,实现了手柄、语音、视觉等多种模式对机器人及其上载荷进行操控;同时将四足仿生机器人测试、行走、作业过程中机器人本体及其上载荷的多类型数据存储至操控终端,或通过操控终端和机器人上远场通信设备等将多类型数据上传至云端服务器,云端服务器通过计算机客户端登录,进行远程操作。本发明加强了不同工况下多模式操控仿生机器人的能力,并可获取仿生机器人运动和作业过程超大量的数据,依此对机器人和载荷进行分析和改进,为仿生机器人研制的持续提升和优化提供数据支撑,并为仿生机器人数字孪生系统构建提供数据保障。障。障。
技术研发人员:江磊 汪建兵 许鹏 许威 邢伯阳 梁振杰 赵建新 邓秦丹 邱天奇 张进 高军
受保护的技术使用者:中国北方车辆研究所
技术研发日:2022.05.17
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。