技术特征:
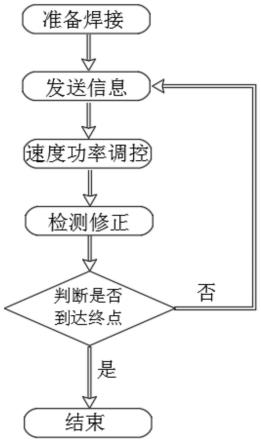
1.激光焊接的功率自适应控制方法,其特征在于,包括以下步骤:s1:准备焊接,机械臂移动至焊接起始位置,与控制系统板建立以太网连接,并向控制系统板发出准备焊接信号;s2:发送信息,机械臂开始向焊接终点处移动,并通过100m的以太网向控制系统板发送实时的速度信息;s3:速度功率调控,控制系统板接收到机械臂的速度信息,按照s形激光功率与机械臂速度的线,用dac输出模拟量的电压,调节激光功率,在焊接时,激光的功率为p,焊接速度为v,设定的焊接速度为vmax,设定的焊接功率为pmax,在焊接速度在0-vmax/2时,激光功率的计算公式为:p=(2pmax/v2max)*v2,在焊接速度在vmax/2-vmax时,激光功率的计算公式为:p=(2pmax/v2max)*v2 (4pmax/vmax)*v-pmax;s4:检测修正,控制系统板的adc电压检测模块检测dac输出的电压值,并用pid算法调控dac输入的电压值以修正;s5:判断是否到达终点,观察机械臂是否到达焊接终点,如果是则结束焊接,如果否,则返回s2步骤,重新焊接。2.根据权利要求1所述的激光焊接的功率自适应控制方法,其特征在于,所述s1中包括控制模块,控制模块包括控制系统板,控制系统板的型号为stm32,控制系统板连接有放大电路,所述s1中还包括网络模块和通信模块。3.根据权利要求2所述的激光焊接的功率自适应控制方法,其特征在于,所述s2中放大电路连接有激光器,激光器发射激光,放大电路的电压为0-3.3v,激光器的电压为0-10v。4.根据权利要求1所述的激光焊接的功率自适应控制方法,其特征在于,所述s3中包括硬件模块,硬件模块包括机械臂控制柜,机械臂控制柜电连接有机械臂,机械臂的速度通过机械臂控制柜反馈给系统控制板。5.根据权利要求4所述的激光焊接的功率自适应控制方法,其特征在于,所述s3中包括计算模块,计算模块与控制模块相连接,控制模块控制硬件模块中机械臂的运行速度和功率。6.根据权利要求1所述的激光焊接的功率自适应控制方法,其特征在于,所述s4中包括修正修正模块和检测模块,且检测模块与修正模块相连接。7.根据权利要求1所述的激光焊接的功率自适应控制方法,其特征在于,所述s5中通过人工观察机械臂是否到达焊接终点,并进行记录统计。
技术总结
本发明涉及激光焊接技术领域,且公开了激光焊接的功率自适应控制方法,包括以下步骤:S1:准备焊接,机械臂移动至焊接起始位置,与控制系统板建立以太网连接,并向控制系统板发出准备焊接信号;S2:发送信息,机械臂开始向焊接终点处移动,并通过100M的以太网向控制系统板发送实时的速度信息;S3:速度功率调控,控制系统板接收到机械臂的速度信息,按照S形激光功率与机械臂速度的线,用DAC输出模拟量的电压。本发明将激光功率与焊接速度建立S形曲线的函数关系,以实时调控激光功率,精细化操作,避免激光功率密度发生变化,从而导致焊接接头质量不高的问题,可有效改善激光焊接在起弧、落弧和拐角处的凹坑现象。和拐角处的凹坑现象。和拐角处的凹坑现象。
技术研发人员:杨琦
受保护的技术使用者:杨琦
技术研发日:2022.04.29
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。