1.本发明涉及轨道交通的钢轨维护及修复加工技术领域,具体地涉及一种在线轨道差速循环修复加工方法。
背景技术:
2.地铁、轻轨、铁路、高铁等轨道交通中,采用钢轨作为运行导轨。由于长期通车使用,钢轨表面容易产生硬化层、飞边、波磨等各种病害,如果不及时修复极易造成更大的安全隐患,比如:裂纹、断裂、凹坑等,严重影响行车安全。解决病害有两种方案:其一,更换钢轨;其二,对钢轨轨道面进行修复加工以去除病害。然而,地铁每公里更换成本约400万元,一条25公里长的地铁更换成本约1个亿,且更换时长至少需要二周时间,严重影响轨道交通的运行,因此,方案一几乎不可行,往往采用方案二。目前,国际上最先进的修复加工设备是奥地利林辛格铣磨车,该设备最大作业速度为500m/h,如果进一步提高修复切削加工的进给速度,刀具就会发生异常发热和崩刀等而损坏刀具,而地铁和高铁每天仅有3-5小时维护窗口期,按照此速度,单台铣磨车一天可修复1.5-2.5km,修复效率较低难以满足生产需求,因此,亟需提高钢轨修复的效率。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种在线轨道差速循环修复加工方法,包括如下步骤:修复车沿着待修复的钢轨向前移动,所述修复车上安装的多把修复刀具沿闭合路径循环地移动,处于修复工位上的所述修复刀具向后移动以连续地、不重复地且同时地在各自工位上进行修复作业。
4.进一步地,所述修复刀具等间距设置,处于修复工位上同时作业的所述修复刀具的数量为n,n为不小于2的整数,至少两把所述修复刀具同时进行修复作业。
5.进一步地,所述修复车以速度大小为v1向前移动,所述修复刀具以速度大小为v2沿闭合路径顺时针移动,v2≠v1,处于修复工位上的修复刀具的实际进给速度为v0,v0≥v1/n,其中v0小于或等于修复刀具耐受的最大安全修复速度,当v1>v2时,处于修复工位上的修复刀具向前修复;当v1<v2时,处于修复工位上的修复刀具向后修复。
6.进一步地,当v1>v2时,所述v2与v1的大小优选v2=v1(n-1)/n;当v1<v2时,所述v2与v1的大小优选v2=v1(n 1)/n。
7.进一步地,当v1>v2时,所述v2与v1的大小优选v1(n-1)/n-10≤v2<v1(n-1)/n;当v1<v2时,所述v2与v1的大小优选v1(n 1)/n<v2≤v1(n 1)/n 10。
8.进一步地,所述闭合路径为腰圆形,所述腰圆形的下腰为所述修复工位。
9.进一步地,所述修复刀具为成形铣刀。
10.本发明所提供的一种在线轨道差速循环修复加工方法,修复工位上的多把修复刀具同时以大小不同于修复车行进速度的速度匀速地向后循环移动,实现钢轨的在线差速修复加工,修复工位上的每把修复刀具在各自的工位上独立作业进行钢轨修复,各刀具连续、
不重复地且同时进行分段修复作业,总体上形成连续的不重复的且同时的修复作业,修复车以n倍于修复刀具的安全作业速度进行修复作业,在同一时间段内本发明所修复的钢轨线长远远大于现有的方法所修复的钢轨线长远高于现有修复车的作业速度,从而可快速完成轨道修复作业,显著地提高修复效率。
附图说明
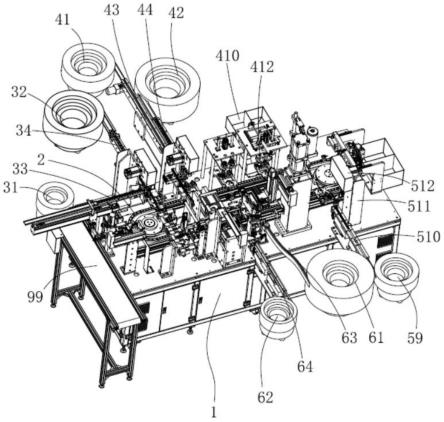
11.图1是本发明提供的一种在线轨道差速循环修复加工装置的结构示意图;
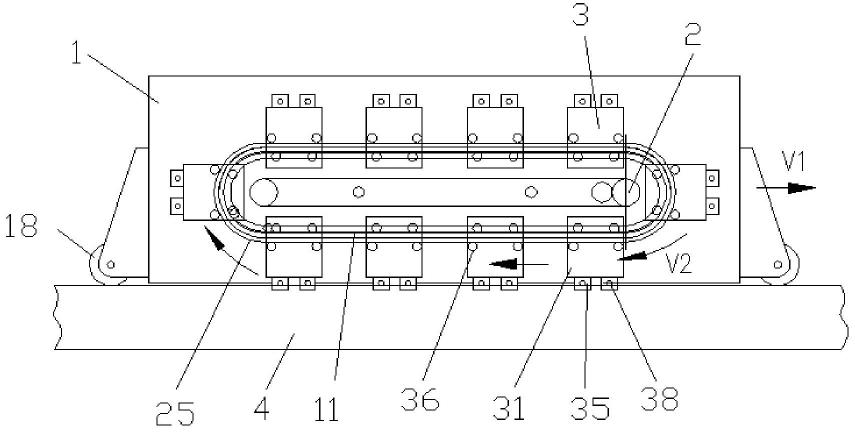
12.图2是本发明中驱动机构及修复机构的结构示意图(护罩未视出);
13.图3是本发明中驱动机构及修复机构去掉配电板的结构示意图;
14.图4是本发明中驱动机构及配电板与机架的结构示意图;
15.图5是本发明中修复机构的结构示意图;
16.其中,1、主机架;11、导轨;12、护罩;13、安装板一;14、连接件;15、配电板;16、导电滑道;17、安装板二;18、行走轮;2、驱动机构;21、驱动电机;22、减速机构;23、链轮轴;24、主动链轮;25、链条;26、从动链轮;3、修复机构;31、连接块;32、安装座;33、修复电机;34、联轴器;35、铣刀一;36、导向轮;37、过电刷;38、铣刀二;4、钢轨
具体实施方式
17.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
18.在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
20.如图1所示,本发明提供了一种在线轨道差速循环修复加工装置,包括:主机架1、驱动机构2、多组修复机构3,所述驱动机构2设置在主机架1上,多组所述修复机构3设置在所述驱动机构2上,所述修复机构3通过连接块31与驱动机构2的链条25连接。所述驱动机构2驱动所述修复机构3在主机架1上做循环运动。
21.主机架1的底部设置有行走轮18,主机架1在火车机头或安装在主机架1上的动力装置的牵引下沿着待修复的钢轨4向前行进。
22.如图4所示,两块安装板一13通过连接件14相连组成工字型的副机架,两块安装板一13上均设置有腰圆形的导轨11,并通过导轨11与主机架1固定相连,在导轨11的外侧设置有护罩12,在其中的一块安装板一13的外侧安装有配电板15,配电板15上设置有环形的导电滑道16,配电板从主机架或者直接从火车机头取电。
23.所述驱动机构2包括设置在副机架上的驱动电机21、减速机构22、链轮轴23、主动
链轮24、链条25、从动链轮26。其中减速机构22由具有一定减速比的齿轮组构成。
24.副机架前端左右两侧均设置有主动链轮24,副机架后端左右两侧均设置有从动链轮26,位于左侧的所述主动链轮24与位于左侧的所述从动链轮26之间通过一个链条25相连,位于右侧的所述主动链轮24与位于右侧的所述从动链轮26之间通过另一个链条25相连,即其中一个链条25位于左侧,另一个链条25位于右侧,两个链条相平行。护罩12与安装板一13以及主机架形成半密封对主动链轮24、从动链轮26、链条25进行保护。
25.如图2、3、5所示,每组修复机构3包括连接块31、安装座32、修复电机33、联轴器34、铣刀一35、导向轮36、过电刷37,其中,铣刀一用作钢轨修复作业的修复刀具,安装座32一端通过连接块31固定安装在左侧的链条上,另一端通过另一个连接块31固定安装在右侧的链条上,修复电机33安装在安装座32上,联轴器34一端与修复电机33相连,另一端与铣刀一35相连,铣刀一35也安装在安装座32上。在连接块31的内侧面上固定安装有两排导向轮36,在其中一个连接块31的外侧面安装有过电刷37,过电刷37与导电滑道16配合从而从导电滑道16上取电为修复电机33供电。结合图3、4所示,护罩12与安装板一13以及配电板15形成密封结构将过电刷37、导电滑道16进行密封。
26.如图2、3、4所示,链条25与安装座32通过连接块31固定相连,导轨11卡入两排导向轮36中,从而修复机构安装到副机架上。另外,在安装板一13上设置有安装板二17用于安装配电板15,过电刷37与配电板15上的导电滑道16始终抵接形成稳定的连接以便于为修复电机33提供电源进行铣削加工。作业时,启动驱动电机21,驱动电机21驱动减速机构22转动,减速机构与主动链轮24共用链轮轴23,进而带动主动链轮24顺时针转动,进一步通过链条25带动从动链轮26顺时针转动,通过连接块31带动修复机构3转动,由于导轨11卡入两排导向轮36中,而导向轮36是固定安装在连接块31上的,所以连接块31在链条25的带动下沿着导轨11循环运动,铣刀一接触钢轨4到离开钢轨4的这一段位置为修复工位,处于钢轨上修复工位上的铣刀一向后移动。从理论上讲,自始至终至少同时有2把铣刀一35处于修复工位进行修复作业即可实现本发明的n倍于修复刀具安全作业速度进行修复作业,n为修复工位上修复机构数量。
27.更进一步的是,如图1所示,有的修复机构的铣刀一为粗铣铣刀,在同一安装座上铣刀一进给路径的后方还设置有铣刀二38,铣刀二38为精铣铣刀,两把铣刀的加工精度不同,以完成轨道修复的粗加工和精加工;通过粗铣、精铣两次铣削同时加工达到提高钢轨修复精度,实现修复车在一次行走过程中完成粗精二道工序的修复加工作业,节约作业时间,提高修复精度。
28.如图2、3所示,本实施例中有14组修复机构,相应地设置有14把铣刀一,其中有5把铣刀一始终处于修复工位。
29.另外,本发明还提出一种在线轨道差速循环修复加工方法,包括如下步骤:修复车沿着待修复的钢轨向前移动,所述修复车上安装的多把修复刀具(即铣刀一或铣刀一、铣刀二)沿闭合路径循环地移动,处于修复工位上的所述修复刀具向后移动以连续地、不重复地且同时地在各自工位上进行修复作业。
30.其中,所述修复刀具等间距设置,处于修复工位上同时作业的所述修复刀具的数量为n,n为不小于2的整数,至少两把所述修复刀具同时进行修复作业。
31.所述修复车以大小为v1的速度向前移动,即修复车的修复速度,所述修复刀具以
大小为v2的速度沿闭合路径顺时针移动(修复刀具速度即修复机构速度),v2≠v1(如果v2=v1,则修复刀具的进给速度v0=∣v1-v2∣=0,将不会进行修复作业),处于修复工位上的修复刀具的实际进给速度为v0=∣v1-v2∣,当v0=v1/n时,在同一时间段内n把修复刀具刚好可以无缝修复完修复车移动距离的钢轨,当v0>v1/n时,在同一时间段内n把修复刀具进给总距离大于修复车移动的距离,也即是修复刀具存在没有负荷的空载状态或者是重复铣削修复的状态,当v0<v1/n时,在同一时间段内n把修复刀具进给总距离小于修复车移动的距离,存在遗漏修复的状态,其中v0小于或等于修复刀具耐受的最大安全修复速度,所以本发明的在线轨道差速循环修复加工方法可以实现的修复速度v1≤nv0,目前最大的v0=500m/h,在前述实施例中n=5,则前述实施例中修复车的最大修复速度v1为2500m/h。在本实施例中除非特别说明外,速度单位均采用m/h。
32.在修复铣削过程中存在两种情况,一是处于修复工位上的修复刀具向前修复,则需要v1>v2,所述v2与v1的大小关系为v2=v1(n-1)/n,以v0=500m/h,n=5为例,则最大修复速度为v1=2500m/h,v2=2000m/h。但为了避免刀具磨损或者设备间隙等误差问题而产生的修复遗漏,所以v2与v1的大小优选v1(n-1)/n-10≤v2<v1(n-1)/n,修复刀具可以主动地向前重复铣削或空载一个微小距离,以v0=500m/h,n=5为例,则最大修复速度v1=2500m/h,1990m/h≤v2<2000m/h较为合适。
33.二是处于修复工位上的修复刀具向后修复,则需要v1<v2时,所述v2与v1的大小优选v2=v1(n 1)/n;以v0=500m/h,n=5为例,则最大修复速度为v1=2500m/h,v2=3000m/h。但为了避免刀具磨损或者设备间隙等误差问题而产生的修复遗漏,所述v2与v1的大小优选v1(n 1)/n<v2≤v1(n 1)/n 10,主动地向后重复铣削或空载一个微小距离。以v0=500m/h,n=5为例,则最大修复速度v1=2500m/h,3000m/h≤v2<3010m/h较为合适。
34.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。