技术特征:
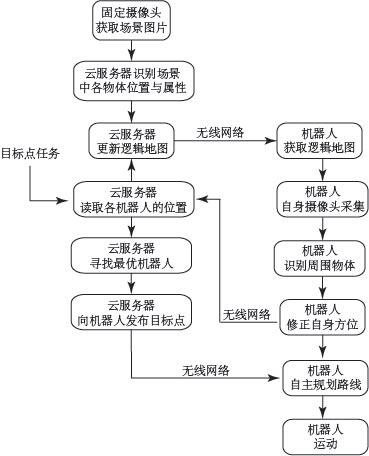
1.基于逻辑地图的机器人集群控制系统及导航方法,集群控制系统包括:1)多台独立,具有联网通信功能,且具有运动机构的机器人模块;2)位于每台机器人模块上的摄像头传感器;3)具有gpu运算能力的云端处理器;4)多台固定于场景中的视频监控模块;导航方法包括:1)基于基于逻辑地图的机器人定位方法;2)基于机器人当前状态的位置预判方法;3)基于机器人id及优先级的导航控制算法;5)基于虚拟主路径及节点的导航控制算法。2.基于权利要求1所述的机器人模块,其特点为:1)机器人内部具有处理器,能够基于云端处理器输出的交通控制指令自行规划其自身的运动状态;2)机器人可以读取其自身的摄像头传感器数据,同时能够从云端处理器中下载,并实时更新其自身的物体识别算法的相关参数;基于该参数对机器人摄像头视场内的物体进行识别,并标定其与自身的相对位置;3)机器人能够实时从云服务器中下载动态逻辑地图,并基于该地图实现自身的局部导航规划。3.基于权利要求1所述的云端处理模块,其特点为:1)能够通过wifi,4g,5g等方式与每一台机器人进行网络通信;2)能够读取场景中所有视频监控模块的视频信息;3)可通过网络,获取机器人模块上的摄像头传感器的图像信息;4)能够通过训练后的深度神经网络模型,识别出场景内的特征性物体,并基于物体位于摄像头中的像素坐标推断其在空间中的位置;5)能够抽象出场景中各物体的特点以及光照信息,并抽象出基于各物体特点,及其各物体位置的逻辑地图。4.根据权利要求1所述的逻辑地图,其特点为:地图中包含的信息为空间中的3d特征区域集合,每个特征区域代表一个场景中实际存在的独立物体,每个特征区域具有空间坐标,物体类别,光照强度特点,逻辑地图中不包含基于像素点的图像信息,其存储方式为一个结构体列表。5.基于权利要求1所述的视频监控模块,其特点为:1)视频监控的视场范围覆盖机器人的运动区域;2)在同一场景下可由多台视频监控,由不同角度进行覆盖。6.基于权利要求1所述的云端处理模块,其特点为:能够通过与机器人的网络通信,获取每台机器人的位置。7.基于权利要求1所述的导航方法,其特点为:某一台机器人(记为机器人b)通过自身摄像头,参考另一台机器人(记为机器人a)实现对自身的定位后可共享其位置,其他机器人(记为机器人c)可采用权利要求9所示的方法获取机器人b的位置,基于机器人b的位置以及c与b的相对位置,实现对自身位置的评估。8.基于权利要求1所述的机器人位置预判方法及基于优先级的交通控制算法,其特点为:云端处理模块获取全部机器人的当前位置,同时预判场景中各移动物体(包括机器人以及行人)的位置信息,预判可能发生路径冲突的机器人或行人,按照id值的顺序,对id优先级较低的机器人发送规避信号,使其避让优先级较高的机器人。9.基于权利要求1所述的导航方法及主路径,其特点为:云端处理器采用基于节点的迪杰斯特拉算法实现对机器人全局路径的规划,机器人内部基云端处理器的控制指令,规划自身的局部移动方案。
技术总结
在当前模式识别方面的研究中,基于深度神经网络对场景中物体进行识别是普遍采用的方法。在参数经训练后的深度神经网络能够在各种光照条件下识别并标记出场景中的物体类型,识别率可达90%以上。深度神经网络针对场景中运动的物体同样具有可识别性。此外,采用固定于环境中的静态监控摄像头,配合相关算法能够大量识别出场景中的静态,及动态物体。本发明即基于上述背景,提出了一种基于场景摄像头构建动态逻辑地图的方法,同时,基于逻辑地图及云服务器规划,实现对各机器人导航状态的实时控制。制。
技术研发人员:罗嘉伟 刘思宇 董一名
受保护的技术使用者:张德雨
技术研发日:2021.02.20
技术公布日:2022/8/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。