1.本发明涉及工业机械的数值控制装置、切屑去除系统、切屑去除方法。
背景技术:
2.在制造现场应用了机床、工业机器人等各种工业机械。在工业机械中,具有利用工具对工件进行开孔的工业机械。在进行开孔时,会产生切屑。当进行开孔循环时,有时切屑会缠绕在工具上。若切屑缠绕在工具上,则加工精度有可能发生变化,缠绕在工具上的切屑有可能损伤工件。因此,需要定期地去除切屑,但在以手工作业去除切屑的情况下,需要停止机械并直接接触工具,因此是繁杂的。
3.在现有的数值控制装置中存在自动地去除切屑的数值控制装置。例如,专利文献1所记载的数值控制装置使主轴向加工时的反方向旋转,去除缠绕在工具上的切屑。进行该去除时的数值控制装置的控制对象是主轴的转速。该数值控制装置使主轴持续旋转直至主轴的转速在逆旋转下达到预定值。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第6398254号
技术实现要素:
7.发明所要解决的课题
8.当仅通过转速来判断切屑的去除时,有时切屑无法完全去除。另外,如果没有足够的移动距离,则难以使主轴的转速达到预定值,难以调节转速。
9.在工业机械的领域中,期望可靠地去除切屑的技术。
10.用于解决课题的手段
11.本公开的一个方式的控制装置是使工具旋转来对工件进行切削的工业机械的控制装置,其具备:动作变更部,其变更工具的旋转方向;以及旋转时间判定部,其判定工具的逆旋转的时间,动作变更部在工具切削了工件后,使工具逆旋转,当旋转时间判定部判定为工具的逆旋转的时间达到了预定时间时,动作变更部结束所述逆旋转。
12.本公开的一个方式的切屑去除系统是使工具旋转来对工件进行切削的工业机械的控制系统,其具备:动作变更部,其变更工具的旋转方向;以及旋转时间判定部,其判定工具的逆旋转的时间,在工具切削了工件后,所述动作变更部使工具逆旋转,当旋转时间判定部判定为工具的逆旋转的时间达到了预定时间时,动作变更部结束逆旋转。
13.本公开的一个方式的切屑去除方法是使工具旋转来对工件进行切削的工业机械的切屑去除方法,在工具切削了工件后,使工具逆旋转,当工具的逆旋转的时间达到预定时间时,结束工具的逆旋转。
14.发明效果
15.根据本发明的一个方式,能够可靠地去除切屑。
附图说明
16.图1是本公开中的数值控制装置的硬件结构图。
17.图2是第一公开中的数值控制装置的框图。
18.图3是表示第一公开的数值控制装置的动作的流程图。
19.图4是第二公开中的数值控制装置的框图。
20.图5是表示第二公开中的数值控制装置的动作的流程图。
21.图6是表示切屑去除动作中的工具的动作的图。
22.图7是表示切屑去除动作中的工具的动作的图。
23.图8是表示切屑去除动作中的工具的动作的图。
24.图9是第三公开中的数值控制装置的框图。
具体实施方式
25.以下,结合附图对本公开进行说明。
26.图1是表示本公开的一个公开的数值控制装置的主要部分的概略硬件结构图。
27.本公开的数值控制装置100所具备的cpu(中央处理单元)111是整体控制数值控制装置100的处理器。cpu111经由总线120读取存储在rom(只读存储器)112中的系统程序,并且按照该系统程序来控制整个数值控制装置100。在ram(随机存取存储器)113中临时存储临时的计算数据、显示数据、以及从外部输入的各种数据等。
28.非易失性存储器114例如由使用未图示的电池备份的存储器或ssd(固态驱动器)等构成,即使数值控制装置100的电源断开也保持存储状态。在非易失性存储器114中存储有经由接口115从外部设备72读入的程序、经由未图示的显示器/mdi单元输入的程序、从伺服电动机50所具备的位置/速度检测器或安装在主轴电动机的位置编码器反馈的各电动机的位置、速度的反馈数据等。在非易失性存储器114中存储的程序、各种数据在执行程序时或使用数据时可以在ram113中展开。另外,在rom112中预先写入了公知的解析程序等各种系统程序。
29.接口115是用于将数值控制装置100的cpu111与usb装置等外部设备72连接的接口。从外部设备72读入用于机床控制的程序、各种参数等。另外,能够将数值控制装置100内编辑的程序、各种参数等经由外部设备72存储在外部存储单元。pmc(可编程机床控制器)116通过内置在数值控制装置100中的时序程序,经由i/o单元117向机床以及该机床的周边装置(例如,工具更换装置、机器人等执行器、安装在机床的传感器等)输出信号来进行控制。另外,pmc116接收来自机床的主体上配备的操作盘的各种开关、周边装置等的信号,在进行必要的信号处理后交给cpu111。
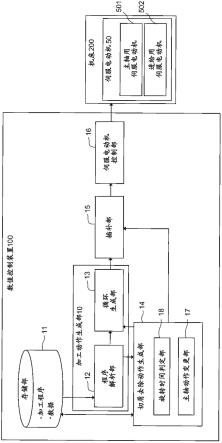
30.用于控制机床所具备的轴的轴控制电路130接收来自cpu111的轴的移动指令量,将轴的指令输出给伺服放大器140。伺服放大器140接收该指令,驱动使机床所具备的轴移动的伺服电动机50。轴的伺服电动机50内置有位置/速度检测器,将来自该位置/速度检测器的位置/速度反馈信号反馈给轴控制电路130,进行位置/速度的反馈控制。伺服电动机50具有主轴用伺服电动机501和进给用伺服电动机502。在主轴用伺服电动机501上安装有工具。进给用伺服电动机502使工具t与工件w在轴向上相对移动。
31.另外,在图1的硬件结构图中,轴控制电路130、伺服放大器140、伺服电动机50各表
示了1个,但实际上按照作为控制对象的机床所具备的轴的数量进行准备。另外,图1的轴控制电路130和伺服放大器140与后述的伺服电动机控制部16对应。
32.参照图2对数值控制装置100进行说明。数值控制装置100具备:存储部11,其存储加工程序、数据;程序解析部12,其解析加工程序;循环生成部13,其基于加工程序生成开孔循环;切屑去除动作生成部14,其生成切屑去除动作的指令;插补部15,其将各种指令变换为伺服电动机50的控制指令;以及伺服电动机控制部16,其控制机床200的伺服电动机50。切屑去除动作生成部14包含旋转时间判定部18和主轴动作变更部17。
33.程序解析部12对存储在存储部11的加工程序进行解析。在加工程序中包含固定循环程序。在固定循环程序中,按照所决定的格式,通过输入数据,能够将预先决定的多个程序块的指令记述在1个程序块中。在固定循环程序中,能够指令开孔、攻丝、钻孔、镗孔等。在切削加工中会产生工件的切屑。在加工程序中包含切削加工的情况下,切屑去除动作生成部14生成切屑去除动作指令,使机床去除切屑。在本公开中,通过固定循环程序进行开孔。本公开的切屑去除动作也能够适用于其他加工。
34.循环生成部13将程序解析部12解析后的固定循环程序变换为通常的指令,并输出到插补部15。
35.切屑去除动作生成部14在加工程序中包含切削指令时,生成使机床执行切屑去除动作的指令。在切屑去除动作中,使主轴逆旋转预定时间。主轴动作变更部17将变更主轴的旋转方向的指令输出到插补部15。旋转时间判定部18判定主轴的逆旋转时间达到预定时间。
36.插补部15基于来自循环生成部13的指令和来自切屑去除动作生成部14的指令,生成伺服电动机50的控制指令。
37.伺服电动机控制部16按照来自插补部15的控制命令,控制伺服电动机50。在开孔循环的情况下,伺服电动机控制部16首先控制进给用伺服电动机502,使工具t移动到预定的加工位置。接着,使主轴用伺服电动机501加速,使主轴用伺服电动机501的旋转速度上升到加工速度。工具t在旋转速度达到加工速度的状态下经过r点(参考点切削进给开始点)。之后,工具t进入工件w,一边切削工件w一边移动至预定的深度。若工件w的开孔完成,则伺服电动机控制部16使工具t后退,开始下一个加工的准备。在开孔完成直到开始下一个加工的期间,数值控制装置100进行切屑去除动作。切屑去除动作与加工动作并行进行。
38.接着,参照图3对本公开的数值控制装置100的动作进行说明。
39.当操作者指示了开始加工时,程序解析部12解析加工程序(步骤s1)。当在加工程序中存在固定循环程序时,循环生成部13将固定循环程序转换为通常的指令(步骤s2),并输出到插补部15。插补部15按照来自循环生成部13的指令生成伺服电动机50的控制命令。伺服电动机控制部16按照来自插补部15的控制命令,控制伺服电动机50。在本公开中,数值控制装置100通过固定循环程序进行开孔加工。
40.在开孔加工中,进给用伺服电动机502使工具t移动到加工位置。
41.此时,将工具t在z轴上的位置称为初始水平(步骤s3)。初始水平是成为固定循环加工的起点的位置。接着,进给用伺服电动机502一边使工具t接近工件w的方向,一边使主轴用伺服电动机501的旋转速度接近加工速度。主轴用伺服电动机501的旋转速度在经过r点前达到加工速度。
42.经过r点(步骤s4),当工具t到达工件w的表面时,开始开孔。一边使主轴旋转一边使工具t移动至孔底来进行开孔(步骤s5)。若开孔结束,则工具t进行后退(步骤s6)。然后,进行下一个加工的准备(步骤s7)。
43.切屑去除动作生成部14在工具t离开工件w开始下一个加工之前的期间,进行切屑去除动作。以对工具t施加的负荷、r点为基准来判定工具t与工件w是否已分离。
44.在切屑去除动作中,主轴动作变更部17首先向插补部15输出指令,使主轴用伺服电动机501开始逆旋转(步骤s8)。旋转时间判定部18判定主轴的逆旋转是否达到了预定时间。若逆旋转的时间达到预定时间(步骤s9),则主轴动作变更部17向插补部15输出指令,结束主轴用伺服电动机501的逆旋转(步骤s10)。
45.如以上说明的那样,第一公开的数值控制装置100通过使工具t向反方向旋转预定时间,能够去除缠绕于工具t的切屑。使工具t逆旋转时的旋转速度根据与旋转时间的关系求出。
46.接着,示出第二公开。图4的数值控制装置100具备:判定主轴是否到达初始水平的主轴位置判定部19和使主轴的动作等待的等待处理部20。在该数值控制装置100中,判定主轴是否到达初始水平,在主轴处于初始水平时,进行切屑去除动作。
47.图5是表示第二公开的数值控制装置100的动作的流程图。该流程图的步骤s1~步骤s5的处理与图4的动作相同,因此省略说明。当在步骤s5中开孔结束时,主轴位置判定部19监视主轴在z轴上的位置(步骤s21)。主轴位置判定部19在主轴到达初始水平之前(步骤s22:否),监视主轴的位置。当主轴到达初始水平时(步骤s22:是),主轴动作变更部17将开始主轴逆旋转的指令输出到插补部15。伺服电动机控制部16使主轴用伺服电动机501逆旋转(步骤s23)。旋转时间判定部18判定逆旋转时间是否达到了预定时间。若逆旋转的时间达到预定的时间(步骤s24),则主轴动作变更部17将结束主轴逆旋转的指令输出到插补部15。伺服电动机控制部16按照来自插补部15的控制命令,结束主轴的逆旋转(步骤s25)。在此,切屑去除动作结束。
48.数值控制装置100在主轴到达初始水平时(步骤s22;是),与步骤s23~步骤s25的切屑去除动作并行地开始下一个加工准备(步骤s26)。
49.等待处理部20在工具t经过预定的位置(称为等待判定位置)时,判定切屑去除动作是否结束。在工具t到达了等待判定位置时,切屑去除动作已结束的情况下(步骤s27;是),数值控制装置100继续按照加工程序进行加工准备(步骤s28)。若工具t到达等待判定位置时切屑去除动作未结束(步骤s27:否),则等待处理部20向插补部15输出指令,停止作为加工准备动作的工具t的快进,工具t等待切屑去除动作结束(步骤s29)。若切屑去除动作结束,则再次开始加工准备(步骤s30)。
50.图6、图7表示连续进行开孔时的工具t的动作。在图6的例子中,工具t不进行等待。在图7的例子中,工具t进行等待。
51.首先,对图6进行说明。在工具t的开孔结束后,工具暂时返回初始水平(图6的[1])。此时,作为下一个加工的准备动作,使工具t快进,移动到下一个加工位置。这是加工程序中记载的通常的加工准备动作。数值控制装置100在通常的加工准备动作的同时开始切屑去除动作。
[0052]
具体而言,主轴动作变更部17向插补部15输出指令,使工具t逆旋转。旋转时间判
定部18判定逆旋转的时间是否达到了预定时间。在逆旋转的时间达到预定时间时,主轴动作变更部17结束逆旋转。
[0053]
图6的[2]是逆旋转的结束位置。在图6的[2]中,工具t向下一加工位置移动。因此,数值控制装置100按照加工程序继续通常的加工准备。即,使主轴正转,快进至下一个加工位置。当到达下一个加工位置时,数值控制装置100开始第二次开孔。
[0054]
图7表示使加工准备等待时的切屑去除动作。在开孔结束后,工具t到达初始水平(图7的[1])时,在开始工具t的快进的同时,开始工具t的逆旋转。工具t以初始水平进行平移,但在工具t到达移动路径的某个位置(图7(2)中称为等待判定位置)时,逆旋转的时间未达到预定时间的情况下,等待处理部20将快进的停止指令输出到插补部15。工具t停止快进,进行等待直至切屑去除动作结束。若切屑去除动作结束,则再次开始快进,使工具t移动到下一个加工位置。若工具t到达下一加工位置(图7的[3]),数值控制装置100进行第二次开孔。
[0055]
在图6、图7的例子中,与工具t的快进并行地使工具t逆旋转来去除切屑。
[0056]
除了工具的快进之外,例如,即使在不改变加工位置而进行2重加工的情况下或者稍微错开工具来供给空气的情况等其他动作中,也能够在到达初始水平(或r点)的时刻开始切屑去除动作。
[0057]
当在初始水平开始了切屑去除动作时,优选在结束切屑去除动作之前,不使工具t下降。另外,如图8所示,有时不是在初始水平而是在r点水平开始下一个加工的准备动作。在该情况下,能够在到达r点水平的时刻开始切屑去除动作。当在r点水平开始切屑去除动作时,优选在结束切屑去除动作之前,不使工具t下降。
[0058]
图4的数值控制装置100在初始水平(或r点水平)进行切屑去除动作。在该切屑去除动作中,由于通过时间来控制工具的逆旋转,所以能够高效地去除切屑。另外,由于通过时间进行控制,因此容易调节循环时间。通过在到达初始水平后进行切屑去除动作,机床200产生问题时的退避动作迅速。并且,当在初始水平进行了切屑去除动作时,与工件的距离较远,因此与工件接触的可能性低。
[0059]
在图7的说明中,在判定是否使工具t等待的等待判定位置使工具t等待,但也可以根据需要使工具t移动,在与等待判定位置不同的等待位置使工具t等待。
[0060]
接下来,对第三公开进行说明。图9的数值控制装置100具备将工具t、工件w的材质与工具t的逆旋转时间对应起来的时间表21;以及参照时间表21选择逆旋转时间的时间选择部22。时间表21记载了适合于工具t、工件w的材质的工具t的逆旋转时间。时间选择部22参照时间表21选择与工具t、工件w的材质对应的工具t的逆旋转时间。与工具t、工件w的材质相关的信息既可以由操作员输入,也可以从存储部11读出。旋转时间判定部18使工具t逆旋转由时间选择部22所选择的时间。
[0061]
图9的数值控制装置100根据工具或工件的材质来改变逆旋转时间。
[0062]
例如,当加工粘性高的材料时,切屑变长。在该情况下,长的切屑容易缠绕,因此延长逆旋转时间。相反,在材料的粘性低且脆的材料时,由于切屑变短,因此逆旋转时间也可以短。
[0063]
图9的数值控制装置100根据工具t、工件w的材质,使工具t的逆旋转时间变化,因此能够更高效地去除切屑。
[0064]
附图标记的说明
[0065]
100数控装置
[0066]
111cpu
[0067]
11存储部
[0068]
12程序解析部
[0069]
14切屑去除动作生成部
[0070]
15插补部
[0071]
16伺服电动机控制部
[0072]
17主轴动作变更部
[0073]
18旋转时间判定部
[0074]
19主轴位置判定部
[0075]
20等待处理部
[0076]
21时间表
[0077]
22时间选择部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。