1.本发明属于机器人领域,尤其涉及一种应用于传统酿造过程的开耙机器人及系统。
背景技术:
2.酿造的原理是利用微生物发酵作用,制造酒、醋、酱油等的过程,大致经过以下几个环节:选料、浸渍、蒸煮、拌曲、前后发酵、压榨、过滤、灭菌等。
3.前发酵期间的搅拌冷却,俗称“开耙”,其作用是调节发酵醪的温度。它是传统酿造工艺中较难控制的一项关键性技术,一般由经验丰富的老师傅把关,开耙技术是酿好酒、醋、酱油等的关键。
4.当前人工开耙作业过程中存在以下问题:在发酵过程中,需要24小时不间断监测发酵缸内的发酵程度并进行开耙作业,作业时间长;作业时间没有规律;采用人工作业的方式进行开耙,要求在规定时间内完成对所有发酵缸的开耙作业,开耙作业劳动强度大;需要根据发酵缸内的甜度、酒精度、ph值、温度等参数确定开耙时间,要求作业人员有丰富的开耙作业经验。
技术实现要素:
5.本发明实施例提供一种应用于传统酿造过程的开耙机器人及系统,旨在解决当前人工开耙作业过程中存在的问题。
6.本发明实施例是这样实现的,一方面,一种应用于传统酿造过程的开耙机器人包括:位置定位模块,用于采集发酵缸的位置信息,并将位置信息发送;移动模块,用于接收位置识别设备发送的发酵缸的位置信息,根据位置信息规划移动路线,按照规划移动路线移动至发酵缸所在位置,识别发酵缸的缸口位置以及检测模块到缸口的距离,然后控制开杷模块、检测模块伸入到发酵缸内指定位置;检测模块,用于检测发酵缸内发酵物料的各项生产参数,并将生产参数发送给数据分析模块;;所述生产参数包括物料甜度、酒精度、ph值和发酵温度;数据分析模块,用于对各项生产参数进行分析,根据分析结果,向开耙模块发送控制指令;开耙模块,用于接收数据分析模块的控制指令,根据控制指令控制耙对发酵缸内的发酵物料进行开耙搅拌。
7.作为本发明的一种改进方案:所述机器人还包括定时模块,所述定时模块用于对开耙搅拌时间和开耙间隔时间进行定时。
8.作为本发明的又一种改进方案:所述位置定位模块包括:摄像单元,用于对机器人经过的环境进行图像采集,获取厂区内照片,并将照片发送给图片识别分析单元;
图片识别分析单元,用于接收来自摄像单元发送的图片,识别图片中的发酵缸以及机器人到发酵缸之间的障碍物;位置确认单元,用于对识别出的发酵缸进行定位,获取发酵缸在厂区内的具体位置信息。
9.作为本发明的另一种改进方案:所述移动模块包括:位置信息获取单元,用于接收位置识别设备发送的发酵缸的位置信息,并将位置信息发送给路线规划单元;路线规划单元,用于根据位置信息定位发酵缸在厂区内的位置,结合机器人到发酵缸之间的障碍物,规划移动路线;驱动控制单元,用于根据规划移动路线,控制驱动设备带动机器人按照规划移动路线移动至发酵缸所在位置;识别单元,用于识别发酵缸的缸口位置以及检测模块到缸口的距离;插入控制单元,用于根据发酵缸的缸口位置和检测模块到缸口的距离,控制检测模块伸入到发酵缸内指定位置。
10.作为本发明的进一步方案:所述检测模块包括:甜度检测单元,用于检测发酵缸内发酵物料的甜度;酒精度检测单元,用于检测发酵缸内发酵物料的酒精度;ph值检测单元,用于检测发酵缸内发酵物料的ph值;温度检测单元,用于检测发酵缸内发酵物料的发酵温度。
11.作为本发明的再进一步方案:所述数据分析模块包括:分析单元,用于对各项生产参数进行分析,判断各项参数所处的数据区间等级;结果输出单元,用于根据数据所处的数据区间等级,向开耙模块发送相应的控制指令。
12.作为本发明的优化方案:所述定时模块包括:顺序记录模块,用于对厂区内的多个发酵缸的开耙顺序进行记录;开耙间隔定时单元,用于对每个发酵缸的开耙时间进行记录,对前后两次开耙之间的时间间隔进行定时;开耙搅拌定时单元,用于对每个发酵缸内的物料进行持续开耙搅拌的时长。
13.作为本发明的又一种方案:所述机器人还包括避障模块,所述避障模块设置于机器人底部四周,用于主动感应或者接触后感应障碍物,并向移动模块发送障碍物位置信息。
14.另一方面,一种应用于传统酿造过程的开耙系统包括:如上述所述的机器人,用于执行对发酵缸内的物料进行搅拌开耙;agv小车,用于带动机器人沿着规划的轨迹在厂区内运动;工业机械臂,安装在agv小车上,用于带动检测模块向发酵缸内的指定深度处运动,还用于带动耙在发酵缸内做搅拌运动。
15.本发明的有益效果:位置定位模块采集发酵缸的位置信息并发送给移动模块,移动模块根据位置信息定位发酵缸在厂区内的位置,并规划移动路线,按照规划移动路线移动至发酵缸所在位置,检测模块通过检测件检测发酵缸内发酵物料的各项生产参数,数据分析模块对各项生产参数进行分析,根据分析结果,向开耙模块发送控制指令,所述开耙模
块根据控制指令对发酵缸内的发酵物料进行开耙搅拌。整个过程能够实现传统酿造的自动化开耙工艺,可代替人工实现大作业空间全覆盖全自动化开发作业,大幅降低对作业人员经验依赖、降低作业人员劳动强度,提高开耙作业效率。
附图说明
16.图1是一种应用于传统酿造过程的开耙系统的结构示意图;图2是一种应用于传统酿造过程的开耙机器人的工作状态图;图3是一种应用于传统酿造过程的开耙机器人的内部结构示意图;图4是一种应用于传统酿造过程的开耙机器人中位置定位模块的结构示意图;图5是一种应用于传统酿造过程的开耙机器人中移动模块的结构示意图;图6是一种应用于传统酿造过程的开耙机器人中检测模块的结构示意图。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
18.本发明通过位置定位模块采集发酵缸的位置信息并发送给移动模块,移动模块根据位置信息定位发酵缸在厂区内的位置,并规划移动路线,按照规划移动路线移动至发酵缸所在位置,检测模块通过检测件检测发酵缸内发酵物料的各项生产参数,数据分析模块对各项生产参数进行分析。根据分析结果,向开耙模块发送控制指令,所述开耙模块根据控制指令对发酵缸内的发酵物料进行开耙搅拌。整个过程能够实现传统酿造的自动化开耙工艺,可代替人工实现大作业空间全覆盖全自动化作业,大幅降低对作业人员经验依赖、降低作业人员劳动强度,提高开耙作业效率。
19.图1示出了本发明实施例的一种应用于传统酿造过程的开耙系统的结构示意图,所述应用于传统酿造过程的开耙系统包括:机器人1,用于执行对发酵缸内的物料进行搅拌开耙;agv小车2,用于带动机器人沿着规划的轨迹在厂区内运动;小体积agv小车2可部署在有立柱、窄巷道车间内灵活部署,除需在地面黏贴磁条外,无需对车间进行其他改造。agv小车2采用磁条导向、视觉定位、差速转向、激光避障、可拆卸式锂电池供电,并配备接触式碰撞传感器。车体前后均布置激光避障传感器,同时,车体四周安装接触式碰撞传感器,当车体靠近障碍物距离小于安全距离时,agv小车2及工业机械臂停止运行,当障碍物移除后,agv小车2恢复运行。
20.工业机械臂3,安装在agv小车上,用于带动检测模块向发酵缸内的指定深度处运动,还用于带动耙在发酵缸内做搅拌运动。
21.如图2所示的一种应用于传统酿造过程的开耙机器人的工作状态图,机器人1在厂区内的发酵缸之间工作,在agv小车2的带动下在不同发酵缸之间来回移动,使得工业机械臂3能够位于不同的发酵缸周围,然后工业机械臂3会带动机械人1中的部分模块伸入到发酵缸中,对发酵缸做数据分析,还控制耙对发酵缸中的物料进行搅拌,使得发酵缸中的物料中的物料能够再次与空气中的氧气相结合,使得有氧呼吸和无氧呼吸交替进行,实现发酵
缸内的物料得到充分的发酵。采用全彩3d结构光立体相机引导搭载6自由度工业机械臂3的agv小车2的方式,实现大作业范围内全自主、无人化开耙作业。
22.另外,耙与安装在工业机械臂3前端的驱动件输出端相连,驱动件驱动耙旋转运动。在工厂内,以图2所示为例,2列发酵缸为一组并排布置,每组发酵缸之间布置巷道,巷道宽度为1米。车间内共布置18排、24列发酵缸,共计432个发酵缸。
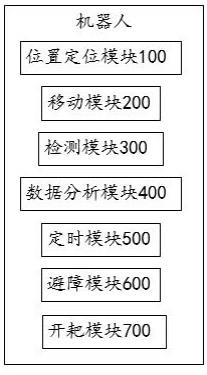
23.图3示出了本发明实施例的一种应用于传统酿造过程的开耙机器人的内部结构示意图,所述机器人包括:位置定位模块100,用于采集发酵缸的位置信息,并将位置信息发送。位置定位模块100可以采用全彩3d结构光立体相机对发酵缸进行定位,可对发酵缸进行精准定位,实现不同规格发酵缸杂乱排布情况下同时作业。相机安装于工业机械臂3末端,主要作用是确定发酵缸相对工业机械臂的方位以及通过图像信息辅助判断缸内发酵状态。
24.移动模块200,用于接收位置识别设备发送的发酵缸的位置信息,根据位置信息定位发酵缸在厂区内的位置,并规划移动路线,按照规划移动路线移动至发酵缸所在位置,识别发酵缸的缸口位置以及检测模块到缸口的距离,然后控制检测模块伸入到发酵缸内指定位置;检测模块300,用于检测发酵缸内发酵物料的各项生产参数,并将生产参数发送给数据分析模块;;所述生产参数包括物料甜度、酒精度、ph值和发酵温度;数据分析模块400,用于对各项生产参数进行分析,根据分析结果,向开耙模块发送控制指令;开耙模块700,用于接收数据分析模块的控制指令,根据控制指令控制耙对发酵缸内的发酵物料进行开耙搅拌。
25.除此之外,数据分析模块400将数据进行保存,为下一次开耙作业提供参考依据,还可以与企业的erp/mes系统连接,实现企业生产、质量等工序的信息化和智能化管理。开耙结构由耙、耙驱动电机以及安装在耙末端的甜度、酒精度、ph值和温度传感器组成,开耙作业前利用上述传感器采集到的数据可确定缸内发酵状态,以调整开耙搅拌工艺。
26.在本实施例的一种情况中,所述机器人还包括定时模块500,所述定时模块用于对开耙搅拌时间和开耙间隔时间进行定时。
27.所述定时模块500包括:顺序记录模块501,用于对厂区内的多个发酵缸的开耙顺序进行记录;开耙间隔定时单元502,用于对每个发酵缸的开耙时间进行记录,对前后两次开耙之间的时间间隔进行定时。
28.开耙搅拌定时单元503,用于对每个发酵缸内的物料进行持续开耙搅拌的时长进行记录,对每缸开耙搅拌时间进行定时。
29.在本实施例的一种情况中,所述机器人还包括避障模块600,所述避障模块600设置于机器人底部四周,用于主动感应或者接触后感应障碍物,并向移动模块发送障碍物位置信息。
30.相机引导开耙工业机械臂自动找寻发酵缸:开耙机器人末端的相机在其视场范围内找寻发酵缸,若视场内无发酵缸,移动模块200向agv小车2下达按预定路线移动指令,同时,相机持续搜索发酵缸,直至找寻到发酵缸位置。之后,引导agv小车2在适当位置停车以
及引导工业机械臂3移动至发酵缸上方适当位置。
31.检测发酵状态:相机采集发酵缸图像,之后,工业机械臂3驱动搅拌耙进入发酵缸内,搅拌耙末端的甜度、酒精度、ph值和温度传感器检测相应参数,并将图像数据以及甜度、酒精度、ph值和温度数据发送至数据分析模块400,由数据分析模块400根据以上数据计算开耙搅拌参数。
32.开耙搅拌:根据数据分析模块400计算的开耙参数,开耙结构开始对发酵缸进行搅拌,同时开耙搅拌定时单元503进行定时,定时到达预设时长的时候,停止搅拌,并记录此时完成开耙的时间点。
33.移动至下一开耙位置:工业机械臂3返回初始状态、相机引导agv小车找寻下一个发酵缸位置;直到开耙任务完成后,agv小车2回到初始位置,等待下一次开耙指令。
34.图4示出了本发明实施例的一种应用于传统酿造过程的开耙机器人中位置定位模块的结构示意图,所述位置定位模块100包括:摄像单元101,用于对机器人经过的环境进行图像采集,获取厂区内照片,并将照片发送给图片识别分析单元;图片识别分析单元102,用于接收来自摄像单元发送的图片,识别图片中的发酵缸以及机器人到发酵缸之间的障碍物;位置确认单元103,用于对识别出的发酵缸进行定位,获取发酵缸在厂区内的具体位置信息。
35.图5示出了本发明实施例的一种应用于传统酿造过程的开耙机器人中移动模块的结构示意图,所述移动模块200包括:位置信息获取单元201,用于接收位置识别设备发送的发酵缸的位置信息,并将位置信息发送给路线规划单元;路线规划单元202,用于根据位置信息定位发酵缸在厂区内的位置,结合机器人到发酵缸之间的障碍物,规划移动路线;驱动控制单元203,用于根据规划移动路线,控制驱动设备带动机器人按照规划移动路线移动至发酵缸所在位置;识别单元204,用于识别发酵缸的缸口位置以及检测模块到缸口的距离;插入控制单元205,用于根据发酵缸的缸口位置和检测模块到缸口的距离,控制检测模块伸入到发酵缸内指定位置。
36.图6示出了本发明实施例的一种应用于传统酿造过程的开耙机器人中检测模块的结构示意图,所述检测模块300包括:甜度检测单元301,用于检测发酵缸内发酵物料的甜度;酒精度检测单元302,用于检测发酵缸内发酵物料的酒精度;ph值检测单元303,用于检测发酵缸内发酵物料的ph值;温度检测单元304,用于检测发酵缸内发酵物料的发酵温度。
37.在一个实施例中,所述数据分析模块400包括:分析单元401,用于对各项生产参数进行分析,判断各项参数所处的数据区间等级;结果输出单元402,用于根据数据所处的数据区间等级,向开耙模块发送相应的控
制指令。
38.在上述机器人和系统的基础上,还可以进行扩展设计,可实现单agv小车2搭载双工业机械臂作业,提高作业效率;多台开耙机器人1同时作业、综合调度,进一步提高作业效率;可将开耙作业数据与用户mes/erp系统对接,实现智能化工厂;可实现自主清洗。当系统检测到发酵缸内发酵异常时,停止开耙作业并对耙进行自动清洗,避免受污染的耙对下一发酵缸;只需更换机械臂末端执行装置,即可实现发酵缸自动清洗。
39.为了能够加载上述系统能够顺利运行,该系统除了包括上述各种模块之外,还可以包括比上述描述更多或更少的部件,或者组合某些部件,或者不同的部件,例如可以包括输入输出设备、网络接入设备、总线、处理器和存储器等。
40.本应该理解的是,虽然本发明各实施例的结构示意图中的各个模块或单元按照箭头的指示依次显示,但是这些模块或单元并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些模块或单元的执行并没有严格的顺序限制,这些模块或单元可以以其它的顺序执行。而且,各实施例中的至少一部分模块或单元可以包括多个子模块或单元或者多个阶段,这些子模块或单元或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子模块或单元或者阶段的执行顺序也不必然是依次进行,而是可以与其它模块或单元或者其它模块或单元的子模块或单元或者阶段的至少一部分轮流或者交替地执行。
41.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
42.以上所述实施例仅表达了本发明的几种较佳实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。