通过远程操作者的车辆控制
背景技术:
1.车辆可以响应于来自操作者的输入或命令来执行各种车辆动作。例如,车辆行驶的方向和/或行驶的速度可以由操作者控制,该操作者坐在车辆中并且操纵方向盘、操纵杆、加速踏板、制动踏板等。车辆的各种附接件或扩展件也可以由坐在车辆上或以其他方式登上车辆的操作者来控制。
附图说明
2.图1是示意性地示出示例性车辆控制系统的各部分的框图。
3.图2是示例性车辆控制方法的流程图。
4.图3是示意性地示出示例性车辆控制系统的各部分的框图。
5.图4是示意性地示出示例性车辆控制系统的各部分的框图。
6.图5是示例性车辆控制系统的前立体图。
7.图6是示例性车辆控制系统的后立体图。
8.图7是示例性车辆控制系统的右侧视图。
9.图8是示例性车辆控制系统的左侧视图。
10.图9是示例性车辆控制系统的前视图。
11.图10是示例性车辆控制系统的右侧后视图。
12.图11是沿图2的线11-11截取的示例性车辆控制系统的底部立体图。
13.在整个附图中,相同的附图标记表示相似但不一定相同的元件。这些图不一定按比例绘制,并且一些零件的尺寸可能被夸大以较清楚地例示出所示的示例。此外,附图提供了与描述一致的示例和/或实施方式;然而,该描述不限于附图中提供的示例和/或实施方式。
具体实施方式
14.公开了有助于由远离车辆的操作者对车辆进行控制的车辆控制系统、方法以及介质。结果,可能需求多人——一人在地面上远离车辆,以及另一人登上车辆并控制车辆——的车辆动作可以由单个操作者执行。结果,原本可能要求登上车辆的操作者反复离开车辆以获得新的视角然后重新登上车辆的车辆动作可以在较少重新登上车辆或不重新登上车辆的情况下执行。
15.出于公开的目的,术语“远程”在提及操作者时是指操作者相对于车辆的直接控制装置诸如方向盘、操纵杆、加速踏板或制动踏板、变速杆、按钮、开关、其他控制杆等而位于本地。在一些实施方式中,远程操作者可以是站在车辆的一部分或车辆的附接件上的操作者,但是其中,操作者不能接近方向盘或车辆的其他输入控制件。例如,操作者可以位于车辆的站台、铲斗或其他附接件上,但不能容易地请求车辆的转向或其他输入控制。在一些实施方式中,远程操作者可以是未登上车辆的操作者。例如,远程操作者可以是站在车辆的前面、后面或侧面的地面上的操作者。在一些实施方式中,远程操作者可以是站立的操作者或
由车辆推动或拉动的机具所运载的操作者。在每种情况下,操作者都远离车辆的直接控制结构(方向盘、操纵杆、按钮、开关、控制杆等)。
16.在一些实施方式中,远程操作者可以是不能容易地到达、接触或物理访问用于特定车辆动作的直接输入接口的操作者,其中公开的车辆控制系统、方法以及介质有助于通过使用由车辆的传感器感测到的操作者的直接或间接姿势而由操作者启动、停止或调节这样的车辆动作。直接姿势包括操作者身体的移动或定位,诸如操作者的手、手臂或腿的移动或定位。操作者的间接姿势可以包括操作者对输入装置的手动移动或定位,其中输入装置的移动或定位由车辆的传感器感测。在这样的情况下,被定位为不能物理接触和移动直接输入装置(方向盘、操纵杆、按钮、开关、控制杆等)以实现期望的车辆动作的操作者仍然可以向车辆提供输入,从而启动、停止或调节此类车辆动作。
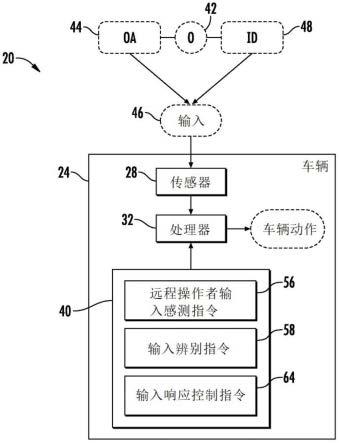
17.图1是示意性示出示例性车辆控制系统20的框图。车辆控制系统20包括车辆24、传感器28、处理器32、以及非暂态计算机可读介质40。车辆24包括自行式车辆。车辆24的示例包括但不限于:卡车、汽车、拖拉机、收割机、乘骑式割草机、扫雪机、四轮车、全地形车辆等。
18.传感器28包括由车辆24承载的至少一个传感器,该至少一个传感器由车辆24支撑,以便能够感测由操作者42发起的直接姿势或间接姿势。由操作者42提供的直接姿势可以由操作者的身体44提供,诸如操作者的手、手指、腿、躯干等的移动或定位。操作者身体的移动、定位/定向可以用作由传感器28感测的输入46。由操作者42发起的间接姿势可以涉及用作输入46的输入装置48的移动和/或定位。输入装置48可以包括能够由操作者42手动操纵并且可以被传感器28辨别的旗帜、指挥棒、智能电话、或者其他手持式或便携式物理结构。
19.传感器28可以具有不同的视场或感测范围。在一些实施方式中,在至少一个传感器28的特定视场内的车辆24周围的特定区域可以被指定用于向车辆24提供远程输入。在其他实施方式中,至少一个传感器28可以具有包围车辆24周围的整个区域的一个视场或多个视场,使得远程操作者可以在车辆24周围的各种可能位置中的任何位置处提供远程输入。
20.在一些实施方式中,传感器28包括由车辆24支撑的至少一个摄像头。在其他实施方式中,传感器28可以包括其他形式的非接触式传感器或无线传感器,诸如激光雷达、雷达、超声传感器等。在一些实施方式中,可以在车辆周围的不同位置处提供不同类型的传感器。
21.处理器32和介质40形成用于车辆24的控制器。尽管处理器32和介质40被示为车辆24的一部分或由车辆24承载,但在一些实施方式中,处理器32和介质40可以被定位为远离车辆24。在这样的实施方式中,由处理器32和介质40形成的控制器可以以无线的方式与车辆24上的本地控制器进行通信。处理器32执行在介质40中提供的指令。介质40可以包含用于对车辆24的其他操作进行控制的附加指令(未示出)。
22.介质40可以是闪存驱动器、存储盘等上软件或编码的形式和/或电路板上逻辑元件形式的硬件。被包含在介质40中的指导处理器32的指令包括远程操作者输入感测指令56、输入辨别指令58、以及输入响应控制指令64。远程操作者输入感测指令56包括被配置成从远程操作者42获得感测到的输入的指令。这样的指令指导处理器32从传感器28拉取信号或以其他方式获取信号,这些信号指示操作者身体44和/或输入装置48的定位和/或移动。指令56还可以指导处理器32从由传感器28提供的信号确定这样的定位或移动。
23.在一种实施方式中,系统20可以在不同模式之间选择性地致动。在第一模式下,传感器28可以感测操作者身体44的定位和/或移动,并使用这样的定位和/或移动以控制车辆24的动作。在第二模式下,传感器28可以感测输入装置48的定位和/或移动,并使用这样的定位和/或移动以控制车辆24的动作。在一些实施方式中,从传感器28获取用于促进对车辆24的远程控制的信号和/或基于操作者42的感测到的姿势来生成用于一个或更多个车辆动作的控制信号,可以是连续的或者可以响应于由操作者42通过直接输入控制而提供的输入来启动,诸如当操作者登上车辆24时。在一些实施方式中,从传感器28获取用于促进对车辆24的远程控制的信号和/或基于操作者42的感测到的姿势来生成用于一个或更多个车辆动作的控制信号,可以响应于指示操作者不再登上车辆24的信号来触发或启动。例如,在一些实施方式中,传感器28和/或系统20的远程控制过程可以处于休眠模式并且可以响应于来自传感器的指示操作者已离开车辆24的信号而被唤醒。在一种实施方式中,一个或更多个传感器可以位于车辆24中操作者的椅子或座位下方,其中传感器28和/或由系统20提供的远程控制过程可以响应于指示操作者不再就座的这样的传感器而被唤醒。
24.输入辨别指令58包括被配置成指导处理器32以辨别感测到的输入并将感测到的输入与特定请求的车辆动作相关联的指令。例如,操作者42将他或她的手指向向下方向的可以被解释为减小车辆的前进速度或后退速度的命令,而操作者42将他的手指向向上方向可以被解释为增大前进速度或后退速度的命令。操作者42将输入装置48指向向下方向可以被解释为减小车辆的前进速度或后退速度的命令,而操作者42将输入装置48指向向上方向可以被解释为增大前进速度或后退速度的命令。操作者42将他的手指向向左方向或将输入装置48指向向左方向可以被解释为使车辆转向向左方向的命令,其中,手指向向左方向的持续时间指示转向的程度或角度。操作者将他或她的手或者输入装置直接指向车辆24可以被解释为使车辆倒车的命令。
25.在一种实施方式中,输入辨别指令58可以指导处理器32在操作者的左手与右手之间进行识别,其中,由左手和右手(或者由左手或右手携带的输入装置)提供的不同姿势可以解释为不同的命令。例如,左手的姿势可以被解释为提供用于车辆速度的命令,而右手提供的姿势可以被解释为提供用于车辆的附接件或机具的移动的命令。
26.在一种实施方式中,介质40可以附加地包括将不同的感测输入(不同的感测姿势)与不同的车辆命令或动作相关联的数据库或查找表。在一些实施方式中,数据库可以是本地的并由车辆24承载。在其他实施方式中,数据库可以远离车辆24。在一些实施方式中,数据库可以是由远程服务器提供的通用数据库,其中,数据库对由不同操作者42操作的多个不同车辆24和不同系统20是可访问的。在一些实施方式中,数据库可以特定于特定的操作者42。在一些实施方式中,数据库可以是使用图像、视频或其他感测到的数据集来训练的神经网络的一部分,或者神经网络辨别不同的姿势并将这些姿势与不同的车辆动作命令或请求相关联。
27.在一些实施方式中,输入辨别指令58可以具有相关联的命令和姿势的不同数据库,用于车辆24在不同位置处支撑的不同的单独传感器28。从第一位置处的第一传感器接收到的姿势可以对应于第一车辆动作,而从第二不同位置处的第二传感器接收到的相同姿势可以对应于不同的第二车辆动作。在一些实施方式中,在车辆上的不同位置或定位处支撑的不同传感器可以被专用于不同的车辆动作或者被分配给不同的车辆动作。例如,在车
辆上的第一位置处的第一传感器或第一传感器组可以被专用于接收用于对第一类型车辆动作进行控制的直接姿势或间接姿势,而在车辆上的第二位置处的第二传感器或第二传感器组可以被专用于接收用于对不同的第二类型车辆动作进行控制的直接姿势或间接姿势。通过较具体示例的方式,支撑在车辆的前端部处的第一传感器可以被专用于接收用于对从车辆的前部延伸的附接件的定位进行控制的直接姿势或间接姿势,而支撑在车辆的后端部处的第二传感器可以被专用于接收用于对从车辆的后部延伸的附接件的定位进行控制的直接姿势或间接姿势。在一些实施方式中,为了让操作者提供用于特定车辆动作的远程输入,操作者必须将他自己或她自己定位在相对于车辆的预定远程位置或指定远程位置,使得他或她的直接姿势或间接姿势被指定用于期望车辆动作的适当传感器捕获。
28.利用这样的示例性实施方式,可以防止操作者无意地提供针对不正确命令的不正确姿势。例如,在一种实施方式中,与收割机的前进移动相关联的姿势可以仅从沿着车辆24的侧部或后部定位或者面向车辆24的侧部或后部定位的传感器接收。面向车辆24的前部的传感器可以被专用于其他车辆动作,而不是车辆24的前进移动。在这样的实施方式中,当指示车辆的前进移动时,可能要求操作者沿着车辆的侧部或后部,而不是在车辆的前部。
29.通过另一示例的方式,具有包围车辆动力输出装置的视场的一个或更多个传感器可能被阻挡或者没有与接收对应于开启动力输出装置的命令的姿势相关联。换言之,仅来自具有与动力输出装置足够远的视场的传感器28的感测姿势可以被用于开启动力输出装置。在这样的实施方式中,这种将传感器分配给特定车辆动作可以防止操作者被意外地卷入动力输出装置中。
30.在一些实施方式中,不同姿势与针对特定车辆动作的不同请求或命令的关联可以附加地基于其他感测参数。例如,当车辆24在执行第一操作或处于第一日期(如由传感器感测到的或由处理器32以其他方式确定的)时,辨别指令58可以指导处理器32查询姿势-车辆动作关联的第一表或第一数据库。当车辆24在执行不同的第二操作或处于不同的第二状态时,辨别指令58可以指导处理器32查询包含不同姿势-车辆动作关联的第二表或第二数据库。通过具体示例的方式,指令58可以指导处理器32根据连接到车辆24的附接件的类型或特性、或者根据当前由车辆24推动或拉动的特定机具的类型或特性,查询包含不同姿势-车辆动作关联的不同数据库。附接件或机具的类型或特性可以由操作者输入或可以被感测。
31.输入响应控制指令64包括以下指令,该指令被配置成将控制信号输出至车辆24的各种致动器等以使车辆24执行与由指令58确定的感测输入相对应的特定车辆动作。可能与来自操作者42的(直接或间接)特定姿势相关联——其中可以响应于该特定姿势而执行的——的各种车辆动作的示例包括但不限于由以下车辆动作:前进速度、后退速度、左/右方向、制动、灯(夜灯、行车灯、聚光灯)、信号、声音(喇叭、扬声器)、警示(闪光灯、危险灯)、机具特定动作(左喷洒器开/关、右喷洒器开/关、左机具翼板升高和降低、右机具翼板升高和降低、动力张紧(power take up)、移动排放口、改变排放口的螺旋钻的运行速度、开启/关闭动力输出装置(powertakeoff)、调节动力输出的速度、升高/降低车辆的附接件(诸如铲斗、货叉等)、调节对机具或附接件的液压流体或液压动力的供应、升高/降低三点挂接装置等。
32.图2是示例性车辆控制方法120的流程图。尽管方法120是在由系统20执行的背景下描述的,但应理解的是方法120可以类似地使用任何以下描述的系统或类似的系统执行。
如框124所示,处理器32可以从远离车辆24的操作者42获得感测输入。可以从由车辆24承载的至少一个传感器28获取感测输入。
33.如框128所示,处理器32可以辨别感测输入并将该感测输入与特定请求或命令的车辆动作相关联。如上所述,这样的关联可以通过查询将不同的感测输入/姿势与不同的车辆动作相关联的本地或远程的数据库或查找表。在一些实施方式中,确定与感测输入或姿势相对应的特定请求车辆动作可以附加地基于从哪个特定传感器28接收到感测姿势和/或车辆24的特定状态,该特定状态包括与车辆24相关联的任何机具或附接件的状态或特性。
34.在一些实施方式中,操作者42或其他管理者可以向系统20提供选择,该选择可以通过使用远程感测姿势来识别出请求了哪些特定车辆动作。例如,数据库可以包括可以通过使用远程姿势来控制的大量可用车辆动作,但是其中操作者或其他人可以授权这样的可用车辆动作中的仅一部分或选定的组,以通过远程姿势进行控制。
35.如框132所示,处理器32可以向车辆24输出控制信号,以使车辆24执行当前与从远程操作者42感测的输入/姿势相关联的特定车辆动作。如上所述,这样的车辆动作的示例包括但不限于:前进速度、后退速度、左/右方向、制动、灯(夜灯、行车灯、聚光灯)、信号、声音(喇叭、扬声器)、警告(闪光灯、危险灯)、实施特定动作(左喷洒器开/关、右喷洒器开/关、左机具翼板升高和降低、右机具翼板升高和降低、动力张紧、移动排放口、改变排放口的螺旋钻的运行速度、开启/关闭动力输出、调节动力输出的速度、升高/降低车辆的附接件(诸如铲斗、货叉等)、调节对机具或附接件的液压流体或液压动力的供应、升高/降低三点挂接装置等。
36.图3是示意性示出示例性车辆控制系统220的各部分的框图。车辆控制系统220类似于上述车辆控制系统20,除了车辆控制系统220包括代替车辆24和输入装置48的车辆224和输入装置248。车辆224附加地被示出为联接至附接件/机具225。
37.车辆224本身类似于车辆24,除了车辆224被例示为具体包括灯300、转向单元302、推进单元304、动力输出(pto)单元306、液压动力单元308、制动器310和辅助单元312。车辆224附加地包括输入动作存储器314、授权存储器316、麦克风318和传感器320。介质40附加地包括操作者识别并授权指令52、输入装置识别并授权指令54、以及操作者位置识别指令60。与系统20的各部件相对应的车辆224和系统220的其余部件被赋予类似的附图标记。
38.灯300包括由车辆224支撑的灯,用于提供车辆224周围的照明或用于为车辆224提供警报或通知。转向单元302包括电气部件和/或液压部件以及相关联的控制器,它们实现车轮、履带等的转向以使车辆224转向前进行驶或转向后退行驶转向。推进单元304包括内燃机、电动马达、变速器、以及用于控制车辆224的前进推进和后退推进的相关联控制器。pto单元306包括电气驱动器、液压驱动器、或机械驱动器、以及相关联的控制器(诸如突出的花键),用于使动力输出装置旋转以向与附接件或机具相关联的配件供应扭矩。液压动力单元308包括液压泵、阀和相关联的控制器,用于将经加压的液压流体供应至车辆224的部分或者供应至由来自车辆224的这种经加压的液压流体提供动力的附接件/机具。制动器310包括用于制动、减慢车辆224推进的装置。辅助单元312包括车辆224的可移动部件或致动器部件。例如,辅助单元312可以包括收割机的排放口,其中排放口的定位和/或排放口的螺旋钻的旋转是可调节的。
39.附接件/机具225包括由车辆224承载的附接件和/或由车辆224推动或拉动的机
具。附接件可以是铲斗、铲刀、收割机头等的形式。机具的示例可以包括诸如以下的各种机具中的任何一种:货车、手推车、犁、轮盘、切碎机、打捆机、喷洒器等。如上所述,车辆动作可以涉及对这样的附接件或机具进行重新定位,或者对供应至这样的附接件或机具的动力进行调节。特定姿势与特定输入/命令的关联可以根据联接至车辆224的特定附接件或机具和/或联接至车辆224的特定附接件或机具的当前状态而变化。根据联接至车辆224的特定附接件或机具和/或联接至车辆224的特定附接件或机具的当前状态,相同的指导者间接手势可以与不同的命令相关联。
40.输入动作存储器314包括将各种(直接或间接)感测姿势与用于车辆动作的相关联的请求或命令链接的一个或更多个数据库或查找表。
41.授权存储器316包括一个或更多个数据库或查找表,该数据库或查找表识别经预授权的操作者和/或经预授权的输入装置248,以提供用于输入车辆动作的请求或命令的姿势。例如,授权存储器316可以包括经授权的操作者42的照片,其中操作者的授权可以通过将捕获到的候选操作者42的图像与被包含在存储器316中的照片进行比较来确定。授权存储器316可以包括预分配的密码组,其中对操作者42或输入装置248的授权可以通过将经由麦克风318接收到的密码输入与存储器316进行比较来确定。授权存储器316可以包括用于授权输入装置248的条形码值或其他签名。输入动作存储器314和授权存储器316可以被包含在由车辆524承载的介质540上,或者可以被存储在远程存储器或服务器中,其中车辆524经由与远程存储器或服务器的无线通信连接来访问存储器314、316。
42.操作者识别并授权指令52包括以下指令,该指令用于指导处理器32识别并授权候选操作者42,从而提供直接姿势以用于提供车辆224的远程控制命令。指令52可以指导传感器28或替代性传感器诸如传感器320(以摄像头或其他传感器的形式)捕获操作者42的图像,然后将接收到的信息或数据与在授权存储器316中找到的信息进行比较。基于这样的比较,操作者42可以被授权以提供直接姿势来用于远程控制车辆224。
43.输入装置识别并授权指令54包括以下指令,该指令用于指导处理器32识别并授权候选输入装置248,从而提供直接姿势以用于提供车辆224的远程控制命令。指令54可以指导传感器28或替代性传感器诸如传感器320(以摄像头或其他传感器的形式)捕获输入装置248的条形码或其他标记的图像,或者从输入装置248接收识别信号/授权信号,然后将接收到的信息或数据与在授权存储器316中找到的信息进行比较。基于这样的比较,输入装置248可以被授权以提供间接姿势来用于远程控制车辆224。
44.操作者位置识别指令60包括以下指令,该指令指导处理器32对远程操作者42相对于车辆224的定位进行识别。基于确定的相对定位,这样的指令还可以指导处理器32向操作者42输出通知,建议操作者相对于车辆移动,或者可以自动中断与感测到的操作者输入/姿势相对应的所请求的车辆动作。以这样的方式,指令60可以防止当操作者相对于用于请求车辆动作的车辆224可能太靠近或不在适当的位置时对车辆动作的执行。
45.输入装置248包括由操作者42手动操纵、移动或定位的手持装置。输入装置248包括具有输入识别符332的第一面330。在输入辨别指令58之后,可以由传感器28和处理器32辨别输入识别符332。在一些实施方式中,输入识别符332可以包括闪光灯、颜色的特定图案或深浅、或者容易由传感器28感知的其他特性,以促进对输入装置248的定位和/或移动的感测。
46.输入装置248附加地包括具有显示器336的第二相对面334。在一种实施方式中,来自传感器28或传感器320的信号可以被传输到输入装置248,其中基于这样的信号,将对围绕车辆224的区域的描绘呈现在显示器336上。例如,传感器28、320中的一个传感器可以包括由车辆224承载的摄像头。所捕获的图像可以被传输到输入装置248并被呈现在显示器336上。结果,对车辆224提供远程命令的操作者42可以不仅基于他或她远离车辆224的视角,而且可以基于从车辆224的视角获得的传感器28或320的视角,从而做出这样的姿势并提供这样的命令。因此,关于这样的远程命令,操作者可以做出较明智的决定。在一种实施方式中,输入装置248可以包括与由处理器32和介质40提供的控制器进行无线通信的智能电话,其中智能电话的定位或移动用作用于向车辆224提供远程命令的远程姿势。
47.图4是示出示例性车辆控制系统420的各部分的示意图。如图4所示,系统420允许驾驶员控制拖拉机的运动、以及控制附接到拖拉机直到在物理上从拖拉机移除的工具/装置的动作(诸如站在拖拉机的前面)。传感器被安装在拖拉机上,使得拖拉机可以收集传感器数据。拖拉机分析数据以寻找经过训练可以辨别的姿势。拖拉机根据辨别到的姿势来进行适当的控制改变。该系统可以被用于执行这样的任务,诸如指示拖拉机跟随驾驶员在田地周围或者将拖拉机定位在封闭空间(诸如车库)内。
48.如图4所示,车辆控制系统420包括以成组传感器的形式的传感器阵列428,这些传感器感测并输出实时数据,该实时数据与由操作者42经由他或她的身体44或者经由输入装置诸如输入装置248提供的输入有关。感测到的数据被传输到神经网络432,该神经网络432被训练以辨别成组的控制姿势或输入。这样的辨别可以基于训练库434,该训练库434可以包括成组的视频,这些视频示出了被给出的控制姿势。
49.车辆控制系统420还可以包括规则引擎436,该规则引擎436包括处理器和非暂态计算机可读介质,该规则引擎436基于由神经网络432识别的姿势或输入来输出用于以拖拉机的形式的车辆224的控制指令。如方框438所示,车辆224的操作是基于控制指令来进行调节的。这样的控制指令可以涉及如上所述的转向、速度等。例如,这样的控制指令可以控制灯300、转向单元302、推进单元304、pto单元306、液压动力单元308、制动器310和/或辅助单元312的操作。
50.图5至图11示出了用于以拖拉机的形式的车辆524的示例性车辆控制系统520。车辆524类似于车辆224,除了车辆524附加地包括车辆状态和反馈系统525。车辆状态和反馈系统525为远离车辆524的操作者提供关于车辆524的状态的可见反馈和/或听觉反馈。这样的反馈可以包括:车辆行驶的速度或速率;机具的速度或状态;和/或灯300、转向单元302、推进单元304、pto单元308、制动器310、辅助单元312中任何一者的状态。这样的反馈可以包括:确认从操作者(操作者身体44和/或输入装置248)接收或捕获姿势;确认对这样的姿势进行辨别;指示将要执行这样的命令;请求操作者重复这样的姿势;和/或指示鉴于车辆524的当前状态或者操作者相对于车辆524和/或该车辆524的机具的位置而将不会执行与这样的姿势相关联的命令。
51.车辆524可以用于农业建设和住宅用途中的各种目的。车辆524可以用于推动或拉动机具。车辆524可以包括附接件诸如铲斗、铲刀、反铲等,以用于挖掘、转移和/或运载各种材料诸如土质材料、动物排泄物和农产品等。车辆524可以包括用于接合货盘、箱、盒等的前叉或其他联接机构,其中拖拉机运载和/或提升接合物品。
52.车辆524包括底架600、地面推进构件602、电池604、以及车辆驾驶室606。车辆524还包括灯300、转向单元302、推进单元304、pto单元306、液压动力单元308、制动器310、以及辅助单元312。底架600包括对车辆524的其他部件进行支撑的框架。在例示的示例中,底架600包括用于存储和运输货物的前货台608。在例示的示例中,底架600还被配置为连接到附接件/机具225。在例示的示例中,推进单元304包括电动马达,该电动马达由电池供应的电力驱动。
53.地面推进构件602包括接合底层地形并由推进单元304驱动的构件。在例示的示例中,地面推进构件602包括后轮610和前轮612。在例示的示例中,后轮610是由推进单元304驱动,而前轮612由转向单元302操纵或转动。在其他实施方式中,地面推进构件602可以包括轨道或其他地面接合构件。
54.电池604包括电池单元,该电池单元被可移除地收纳在从底架600的前部向后延伸的对应腔室或腔体内。电池604与对应的连接接口配合,用于将电能从电池604转移到车辆524的电动部件。在其他实施方式中,电池604可以位于其他位置处。在其他实施方式中,电池604可以是固定的并且不可更换或不可移除。在例示的示例中,电池604为驱动后轮610的推进单元304供电。在例示的示例中,电池604为液压动力单元308的液压马达或泵、转向单元302和制动器310供电。电池604附加地为灯300、附接件/机具225和辅助单元312供电。
55.驾驶室606包括轿厢,操作者在操作车辆524时可以坐在该轿厢中。驾驶室606包括座椅612、方向盘616、控制台618、以及车顶620。车顶620在控制座椅612和控制台618的上方延伸。在一些实施方式中,车顶620可以被升高和降低。
56.灯300、转向单元302、推进单元304、pto单元306、液压动力单元308、制动器310和辅助单元312如上所述。在所示的特定示例中,pto单元306包括动力输出装置623(如图10所示)。在例示的示例中,灯300包括引擎盖灯624和车顶灯626。
57.与车辆224一样,车辆524包括对由操作者42做出的控制姿势进行捕获的传感器。在例示的示例中,这样的传感器包括摄像头530-1(如图5所示)、530-2(如图6所示)和530-3(如图11所示)(统称为摄像头530)。摄像头530捕获操作者控制姿势以及周围环境的图像并且将信号输出到处理器32。摄像头530-1在车顶620的前部边缘上延伸以捕获车辆524前部中的区域。摄像头530-2在车顶620的后部边缘上延伸以捕获车辆524后部中的区域的图像。摄像头530-3在车顶620的下侧上延伸以捕获车辆524的侧部区域。这样的摄像头输出了对操作者42的位置进行辨别的信号。在一些实施方式中,车辆524可以包括在相同或不同位置处的附加的或更少的摄像头以及替代形式的传感器。
58.车辆状态和反馈系统525包括指示器570-1、570-2、570-3、570-4(统称为指示器570)、指示器572、指示器574、以及状态/反馈指令568。指示器570包括位于车顶620的四个角落处的显示屏。指示器570-1和570-2面向前进方向,并且朝向车辆524的各自相对的两侧成角度。指示器570-3和570-4面向后退方向,并且朝向车辆524的各自相对的两侧成角度。指示器570呈现可以由操作者42在车辆524周围的各种位置处查看的图形和文本。
59.指示器572包括绕着车辆524的引擎盖601的前部和引擎盖601的侧面缠绕的长形条或条状物,其中条或条状物可以在处理器32的控制下是选择性地发光的。在一些实施方式中,指示器572被致动在发光状态与非发光状态之间,以向可能远离车辆524而不是在驾驶室606内的操作者42提供反馈。在一些实施方式中,指示器572可以被致动在不同颜色之
间或者在颜色深浅之间,以向操作者42提供状态信息。在一些实施方式中,指示器572可以被致动在不同亮度级别之间,或者可以被致动以便闪光或以不同频率闪光,以向操作者42提供状态信息。
60.指示器574包括扬声器/麦克风。在例示的示例中,指示器574位于车顶620的下侧上,靠近转向控制台618。指示器574向远离车辆524的操作者提供听觉状态信息。在指示器574也用作麦克风的一些实施方式中,指示器574可以用作针对远程操作者的输入装置,由此操作者可以提供听觉指令或命令,并且其中,处理器32使用语音辨别以识别这样的命令并执行这样的命令。
61.在一些实施方式中,灯526可以用作附加指示器,其中这样的灯526的颜色、亮度、闪烁频率等可以被控制以向操作者42提供状态信息。在一些实施方式中,附加可见指示器诸如发光二极管灯、灯条等可以被利用,从而基于车辆524的当前状态、该车辆524的机具225的当前状态、该车辆524的部件300、302、304、306、308、310、312的当前状态来提供状态信息,和/或基于由摄像头530捕获的图像来提供操作者42的定位或机具225的定位。
62.状态/反馈指令568包括被设置在非暂态计算机可读介质540中的电路板上的软件、代码或逻辑元件。指令568指导处理器32输出对指示器570、572和574的致动或状态进行控制的各种控制信号。例如,遵照指令568,处理器32可以通过向指示器572提供第一亮度、颜色、开/关状态和/或闪烁频率来指示车辆524的第一状态,并且可以通过向指示器572提供不同的第二亮度、颜色、开/关状态和/或闪烁频率来指示车辆524的不同的第二状态。例如,指示器572可以在前进行驶时发光为具有绿色,以及在停止时发光为具有红色。作为另一示例,指示器572可以在动力输出装置在运行时或者在机具被供电时发光为具有绿色,而在动力输出装置不再运行时或者在机具不再被供电或被驱动时可以具有红色。
63.遵照指令568,处理器32可以通过在一个或多个指示器570上显示图形或文本来指示车辆524的第一状态或车辆524的第二状态。由指示器570、572和574提供的这样的状态信息可以包括:车辆行驶的速度或速率;机具的速度或状态;和/或灯300、转向单元302、推进单元304、pto单元308、制动器310和/或辅助单元312中任一者的状态。由指示器570、572和574提供的这样的反馈或状态信息可以包括:确认从操作者(操作者身体44和/或输入装置248)接收或捕获姿势;确认对这样的姿势进行辨别;指示将要执行这样的命令;请求操作者重复这样的姿势或移动,以便在提供这样的姿势时位于摄像头530的视场内较中心处;或者指示鉴于车辆524的当前状态或操作者相对于车辆524和/或该车辆的机具的位置而将不会执行与这样的姿势相关联的命令。不同的指示器可以被利用以向操作者提供不同类型的状态信息。
64.在一种实施方式中,遵照被包含在介质540中的指令,处理器32利用来自摄像头530-1的图像,以识别植物行的定位并且向转向单元302和推进单元304输出控制信号,从而使车辆524(以及任何附接件/机具225)在植物行(诸如农作物、树木等)之间以及沿着植物行自动驱动。在一种实施方式中,遵照被包含在介质540中的指令,处理器32利用来自摄像头530-1的图像,以识别操作者42的定位或位置以及操作者42的移动。遵照被包含在介质540中的指令,处理器32还可以基于操作者42的位置或移动来阻止或允许来自操作者42的其他命令(基于输入姿势)。在一些实施方式中,遵照被包含在介质540中的指令,处理器32可以输出使得推进单元304和转向单元302移动车辆524的控制信号,以便以预先选择的距
离或操作者选择的距离跟随操作者42的移动。在一些实施方式中,处理器32可以控制推进单元304和制动器310,从而基本上匹配操作者移动的速度。在一些实施方式中,遵照被包含在介质540中的指令,处理器32可以利用由任何摄像头530捕获的图像来识别动物或其他障碍物,其中处理器32向转向单元302和推进单元304输出控制信号来控制车辆524的移动,以避免这样的动物或障碍物。在一些实施方式中,处理器32可以利用来自任何摄像头530的信号来控制由灯624、626提供的照明。在一些实施方式中,处理器32可以利用来自任何摄像头530的信号和来自所提供的全球定位系统的附加信号,从而自动地、没有操作者干预地驱动车辆524往返于工地或场地、往返于车辆524的存储区、棚屋、车库等(住家位置)、或者往返于用于给电池604充电的充电地点或位置。
65.在一些实施方式中,处理器32可以利用识别到的操作者42或动物或其他障碍物的定位,以便对制动器310、pto单元306、辅助单元312或附接件/机具225进行控制。例如,在一种情况下,附接件/机具225可以包括喷洒除草剂、杀虫剂、杀真菌剂等的喷洒器。响应于检测到操作者或动物的存在,处理器32可以暂时停止车辆524的移动和/或喷洒操作,直到操作者或动物与车辆524或该车辆524的机具225相距预定距离。在一些实施方式中,处理器32可以响应于来自摄像头530的、指示了操作者、另一个人或动物在距动力输出装置623的预定距离内的图像而自动停止动力输出装置623的运行。在一些实施方式中,遵照被包含在介质540中的指令,处理器32可以利用由任何摄像头530(加上在车辆524上划分的任何其他传感器)捕获的图像来控制附接件/机具225的致动。例如,处理器32可以识别进料槽的各种位置,并且可以对牵引机具或附接机具225的螺旋钻或者其他装置的致动进行控制,以在特定时间和位置处将进料卸载到进料槽中。结果,处理器32有助于任务的自动化。
66.在一些实施方式中,指示器570或572可以在操作者的当前识别位置将阻止他或她查看或确定这样的信息的情况下向操作者42提供信息。例如,被定位在车辆524的前部处的操作者可能被提供指示器570-1或570-2上的、与位于车辆524的后部处的机具225的状态有关的信息。被定位在车辆524的后部处或车辆524的一侧处的操作者可以被提供在选定的指示器570上的、与车辆524的前部或车辆524的另一侧处的机具、另一操作者或环境的状态有关的状态信息。因此,系统520向远离车辆524的操作者提供了鉴于操作者相对于车辆524的当前位置可能无法查看的信息。
67.尽管本公开内容的权利要求通常针对车辆控制系统,但本公开内容附加地针对以下限定中阐述的特征。
68.1.一种非暂态计算机可读介质,所述非暂态计算机可读介质包含用于指导处理器的指令,所述指令包括:
69.远程操作者输入感测指令,以获得来自远离车辆的操作者的感测输入;
70.输入辨别指令,以辨别所述感测输入并且将所述感测输入与车辆动作相关联;以及
71.输入响应控制指令,以向所述车辆输出控制信号来使所述车辆执行所述车辆动作。
72.2.根据限定1所述的介质,其中,所述感测输入包括所述操作者的身体的移动和/或定位。
73.3.根据限定2所述的介质,其中,所述指令还包括操作者识别并授权指令,以验证
所述操作者为所述车辆提供输入的授权。
74.4.根据限定3所述的介质,其中,所述操作者识别并授权指令将指导所述处理器以将捕获到的所述操作者的图像与存储的授权操作者图像进行比较。
75.5.根据限定3所述的介质,其中,所述操作者识别并授权指令将指导所述处理器以将来自所述操作者的感测姿势与存储的授权姿势值进行比较。
76.6.根据限定3所述的介质,其中,所述操作者标识并授权指令将指导所述处理器以将来自所述操作者的听觉输入与存储的听觉授权值进行比较。
77.7.根据限定1所述的介质,其中,所述感测输入包括由所述操作者对输入装置的移动和/或定位。
78.8.根据限定7所述的介质,其中,所述指令还包括操作者识别并授权指令,以验证所述操作者为所述车辆提供输入的授权。
79.9.根据限定8所述的介质,其中,所述操作者识别并授权指令将指导所述处理器以将捕获到的所述操作者的图像与存储的授权操作者图像进行比较。
80.10.根据限定8所述的介质,其中,所述操作者识别并授权指令将指导所述处理器以将来自所述操作者的感测姿势与存储的授权姿势值进行比较。
81.11.根据限定8所述的介质,其中,所述操作者标识并授权指令将指导所述处理器以将来自所述操作者的听觉输入与存储的听觉授权值进行比较。
82.12.根据限定7所述的介质,其中,所述指令还包括输入装置识别并授权指令,以验证所述输入装置为所述车辆提供输入的授权。
83.13.根据限定7所述的介质,其中,所述输入装置包括显示器,以向所述远程操作者呈现通过由所述车辆承载的摄像头捕获到的图像。
84.14.根据限定13所述的介质,其中,所述输入装置包括:第一面,所述第一面包括能够由所述处理器遵循所述输入辨别指令辨别的输入标记;以及第二相对面,所述第二相对面包括所述显示器。
85.15.根据限定7所述的介质,其中,所述输入装置包括手持且能够定位的输入装置。
86.16.根据限定7所述的介质,其中,所述输入装置包括智能电话。
87.17.根据限定1所述的介质,其中,远离所述车辆的所述操作者站在所述车辆附近的地面上。
88.18.根据限定1所述的介质,其中,所述车辆包括拖拉机。
89.19.根据限定1所述的介质,其中,所述车辆动作选自以下车辆动作:前进速度、倒退速度、左/右方向、制动、灯光(夜灯、行车灯、聚光灯)、信号、声音(喇叭、扬声器)、警示(闪光灯、危险灯)、机具特定动作(左喷洒器开/关、右喷洒器开/关)、动力张紧、移动排放口;打开/关闭动力输出装置;调节动力输出装置的速度;以及升高/降低所述车辆的附接件。
90.20.根据限定1所述的介质,其中,所述车辆包括收割机,并且其中,所述车辆动作包括对所述收割机的排放口进行重新定位。
91.21.根据限定1所述的介质,其中,所述车辆包括拖拉机,并且其中,所述车辆动作包括对所述拖拉机的动力输出装置进行调节。
92.22.根据限定1所述的介质,其中,所述车辆包括具有前附接件/后附接件的拖拉机,并且其中,所述车辆动作包括对所述前附接件/所述后附接件的定位进行调节。
93.23.根据限定1所述的介质,其中,所述指令还包括操作者位置识别指令,以指导所述处理器识别所述远程操作者相对于所述车辆的定位,并且指导所述处理器向所述操作者输出通知,建议所述操作者基于所述定位而相对于所述车辆移动。
94.24.根据限定1所述的介质,其中,所述指令还包括操作者位置识别指令,以指导所述处理器识别所述远程操作者相对于所述车辆的定位,并且指导所述处理器基于所述定位和请求的所述车辆动作,自动中断与感测到的操作者输入相对应的所述车辆动作。
95.25.一种车辆控制系统,所述车辆控制系统包括:
96.车辆;
97.传感器,所述传感器由所述车辆承载;
98.处理器;以及
99.非暂态计算机可读介质,所述非暂态计算机可读介质包含指令以指导所述处理器,所述指令包括:
100.远程操作者输入感测指令,以获得由所述传感器从远离车辆的操作者感测的感测输入;
101.输入辨别指令,以辨别所述感测输入并且将所述感测输入与车辆动作相关联;以及输入响应控制指令,以向所述车辆输出控制信号来使所述车辆执行所述车辆动作。
102.26.根据限定25所述的系统,其中,所述感测输入包括所述操作者的身体的移动和/或定位。
103.27.根据限定26所述的系统,其中,所述指令还包括操作者识别并授权指令,以指导所述处理器验证所述操作者为所述车辆提供输入的授权。
104.28.根据限定27所述的系统,还包括存储的授权操作者图像,其中,所述操作者识别并授权指令将指导所述处理器以将捕获到的所述操作者的图像与所述存储的授权操作者图像进行比较。
105.29.根据限定28所述的系统,还包括存储的授权姿势值,其中,所述操作者识别并授权指令将指导所述处理器以将感测到的来自所述操作者的姿势与所述存储的授权姿势值进行比较。
106.30.根据限定28所述的系统,还包括麦克风和存储的听觉授权值,其中,所述操作者识别并授权指令将指导所述处理器以将通过所述麦克风接收的来自所述操作者的听觉输入与所述存储的听觉授权值进行比较。
107.31.根据限定25所述的系统,还包括输入装置,其中,所述感测输入包括由所述操作者对所述输入装置的移动和/或定位。
108.32.根据限定31所述的系统,其中,所述指令还包括操作者识别并授权指令,以验证所述操作者为所述车辆提供输入的授权。
109.33.根据限定32所述的系统,还包括存储的授权操作者图像,其中,所述操作者识别并授权指令将指导所述处理器以将捕获到的所述操作者的图像与所述存储的授权操作者图像进行比较。
110.34.根据限定32所述的系统,还包括存储的授权姿势值,其中,所述操作者识别并授权指令将指导所述处理器以将感测到的来自所述操作者的姿势与所述存储的授权姿势值进行比较。
111.35.根据限定32所述的系统,还包括存储的听觉授权值,其中,所述操作者识别并授权指令将指导所述处理器以将来自所述操作者的听觉输入与所述存储的听觉授权值进行比较。
112.36.根据限定31所述的系统,其中,所述指令还包括输入装置识别并授权指令,以验证所述输入装置为所述车辆提供输入的授权。
113.37.根据限定31所述的系统,其中,所述输入装置包括显示器,以向所述远程操作者呈现通过由所述车辆承载的摄像头捕获到的图像。
114.38.根据限定37所述的系统,其中,所述输入装置包括:第一面,所述第一面包括能够由所述处理器遵循所述输入辨别指令辨别的输入标记;以及第二相对面,所述第二相对面包括所述显示器。
115.39.根据限定31所述的系统,其中,所述输入装置包括手持且能够定位的输入装置。
116.40.根据限定31所述的系统,其中,所述输入装置包括智能电话。
117.41.根据限定25所述的系统,其中,远离所述车辆的所述操作者站在所述车辆附近的地面上。
118.42.根据限定25所述的系统,其中,所述车辆包括拖拉机。
119.43.根据限定25所述的系统,其中,所述车辆动作选自以下车辆动作:前进速度、倒退速度、左/右方向、制动、灯光(夜灯、行车灯、聚光灯)、信号、声音(喇叭、扬声器)、警示(闪光灯、危险灯)、机具特定动作(左喷洒器开/关、右喷洒器开/关)、动力张紧、移动排放口;打开/关闭动力输出装置;调节动力输出装置的速度;以及升高/降低所述车辆的附接件。
120.44.根据限定25所述的系统,其中,所述车辆包括收割机,并且其中,所述车辆动作包括对所述收割机的排放口进行重新定位。
121.45.根据限定25所述的系统,其中,所述车辆包括拖拉机,并且其中,所述车辆动作包括对所述拖拉机的动力输出装置进行调节。
122.46.根据限定25所述的系统,其中,所述车辆包括具有前附接件/后附接件的拖拉机,并且其中,所述车辆动作包括对所述前附接件/所述后附接件的定位进行调节。
123.47.根据限定25所述的系统,其中,所述指令还包括操作者位置识别指令,以指导所述处理器识别所述远程操作者相对于所述车辆的定位,并且指导所述处理器向所述操作者输出通知,建议所述操作者基于所述定位而相对于所述车辆移动。
124.48.根据限定25所述的系统,其中,所述指令还包括操作者位置识别指令,以指导所述处理器识别所述远程操作者相对于所述车辆的定位,并且指导所述处理器基于所述定位和请求的所述车辆动作,自动中断与感测到的操作者输入相对应的所述车辆动作。
125.49.根据限定25所述的系统,其中,所述指令和所述处理器是至少一个神经网络的一部分。
126.50.根据限定25所述的系统,还包括存储数据库,所述存储数据库将不同的感测输入与不同的车辆动作相对应。
127.51.根据限定25所述的系统,还包括由所述车辆承载的反馈系统,以提供不同的发光状态来向远离所述车辆的操作者指示所述车辆的不同状态。
128.52.根据限定25所述的系统,其中,所述传感器包括摄像头。
129.53.一种计算机实现的车辆控制方法,所述方法包括:
130.获得来自远离车辆的操作者的感测输入;
131.辨别所述感测输入并且将所述感测输入与车辆动作相关联;以及向所述车辆输出控制信号以使所述车辆执行所述车辆动作。
132.54.根据限定53所述的方法,其中,所述感测输入包括所述操作者的身体的移动和/或定位。
133.55.根据限定54所述的方法,还包括验证所述操作者为所述车辆提供输入的授权。
134.56.根据限定55所述的方法,还包括将捕获到的所述操作者的图像与存储的授权操作者图像进行比较。
135.57.根据限定56所述的方法,还包括将感测到的来自所述操作者的姿势与存储的授权姿势值进行比较。
136.58.根据限定57所述的方法,还包括将来自所述操作者的听觉输入与存储的听觉授权值进行比较。
137.59.根据限定58所述的方法,其中,所述感测输入包括由所述操作者对输入装置的移动和/或定位。
138.60.根据限定59所述的方法,还包括验证所述操作者为所述车辆提供输入的授权。
139.61.根据限定60所述的方法,还包括将捕获到的所述操作者的图像与存储的授权操作者图像进行比较。
140.62.根据限定61所述的方法,还包括将感测到的来自所述操作者的姿势与存储的授权姿势值进行比较。
141.63.根据限定60所述的方法,还包括将来自所述操作者的听觉输入与存储的听觉授权值进行比较。
142.64.根据限定59所述的方法,还包括验证所述输入装置为所述车辆提供输入的授权。
143.65.根据限定59所述的方法,其中,所述输入装置包括显示器,以向所述远程操作者呈现通过由所述车辆承载的摄像头捕获到的图像。
144.66.根据限定65所述的方法,其中,所述输入装置包括:第一面,所述第一面包括输入标记;以及第二相对面,所述第二相对面包括所述显示器。
145.67.根据限定59所述的方法,其中,所述输入装置包括手持且能够定位的输入装置。
146.68.根据限定59所述的方法,其中,所述输入装置包括智能电话。
147.69.根据限定59所述的方法,其中,远离所述车辆的所述操作者站在所述车辆附近的地面上。
148.70.根据限定59所述的方法,其中,所述车辆包括拖拉机。
149.71.根据限定59所述的方法,其中,所述车辆动作选自以下车辆动作:前进速度、倒退速度、左/右方向、制动、灯光(夜灯、行车灯、聚光灯)、信号、声音(喇叭、扬声器)、警示(闪光灯、危险灯)、机具特定动作(左喷洒器开/关、右喷洒器开/关)、动力张紧、移动排放口;打开/关闭动力输出装置;调节动力输出装置的速度;以及升高/降低所述车辆的附接件。
150.72.根据限定59所述的方法,其中,所述车辆包括收割机,并且其中,所述车辆动作
包括对所述收割机的排放口进行重新定位。
151.73.根据限定59所述的方法,其中,所述车辆包括拖拉机,并且其中,所述车辆动作包括对所述拖拉机的动力输出装置进行调节。
152.74.根据限定59所述的方法,其中,所述车辆包括具有前附接件/后附接件的拖拉机,并且其中,所述车辆动作包括对所述前附接件/所述后附接件的定位进行调节。
153.75.根据限定59所述的方法,还包括识别所述远程操作者相对于所述车辆的定位,并且向所述操作者输出通知,建议所述操作者基于所述定位而相对于所述车辆移动。
154.76.根据限定59所述的方法,还包括识别所述远程操作者相对于所述车辆的定位,并且基于所述定位和请求的所述车辆动作,自动中断与感测到的操作者输入相对应的所述车辆动作。
155.尽管已经参考示例性实施方式描述了本公开内容,但是本领域技术人员将认识到可以在不脱离本公开内容的情况下在形式上和细节上做出改变。例如,尽管不同的示例性实施方式可能已被描述为包括提供各种利益的特征,但预期在所描述的示例性实施方式或其他替代实施方式中,所描述的特征可以彼此互换或可替代地彼此组合。因为本公开内容的技术相对复杂,因此并非所有的技术变化都是可以预见的。参考示例性实施方式描述并在所附权利要求中阐述的本公开内容显然意在尽可能宽泛。例如,除非另有特别说明,否则列举单个特定元件的权利要求也涵盖多个这样的特定元件。权利要求中的术语“第一”、“第二”、“第三”等仅区分不同的元件,并且除非另有说明,否则不与本公开内容中元件的特定顺序或特定编号具体关联。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。