1.本发明涉及移动路径绘制装置,尤其涉及绘制多个驱动部的移动路径的移动路径绘制装置。
背景技术:
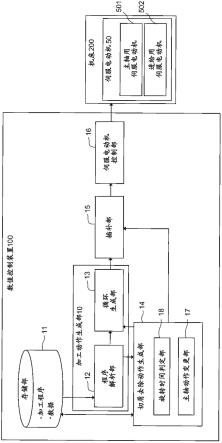
2.控制机床等工业机械的控制装置有时为了加工一个工件而同时控制多个系统(例如,专利文献1等)。图5表示在车床中在系统1的可动部分和系统2的可动部分分别安装工具并同时加工1个工件的例子。在这样的情况下,为了控制多个系统而分别准备控制用程序。并且,控制装置通过使该多个控制用程序下的控制动作协作,使各系统的可动部分的动作协作。
3.在检查多个系统的控制用程序中是否存在错误的情况下,例如能够通过离线的控制模拟器模拟并检查各系统的控制用程序下的控制动作。另一方面,在控制装置中,具有:执行控制用程序,并且根据操作员旋转的手动手柄的旋转量,使各系统的可动部分沿着由控制用程序指示的移动路径缓慢移动的手动手柄折返功能;以及在抑制了控制对象的机械轴的移动的状态下进行运转的机器锁定运转功能。因此,通过使用控制装置的这些功能来确认控制用程序的动作,能够在不实际加工工件的情况下检查各系统的控制用程序下的控制动作。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2007-122461号公报
技术实现要素:
7.发明所要解决的课题
8.控制模拟器解释控制用程序的程序块,生成作为控制对象的机械的可动部分的刀架、主轴头的移动路径。然后,一边绘制所生成的可动部分的移动路径及加工后的工件的形状,一边将所述可动部分绘制在程序块终点位置。控制模拟器对控制用程序的全部程序块反复进行这样的一系列的处理。
9.控制模拟器在进行上述处理时,一般不考虑预测在实际的动作控制中要花费的各程序块的执行时间。例如,考虑模拟用于通过安装于图5所示的2个系统的可动部分的工具来加工工件的控制用程序。图6是表示由控制装置执行了控制系统1的控制用程序和控制系统2的控制用程序的情况以及进行了控制模拟的情况下的处理时间的图。如图6所例示,在分别由控制装置执行了系统1的控制用程序和系统2的控制用程序的情况下,各个程序块的处理时间根据指令的种类、内容而不同。然而,在由控制模拟器进行了控制模拟的情况下,各个程序块的处理时间基本相同。因此,控制模拟器无法准确地表现多个系统的可动部分的每个时刻的位置关系。
10.作为其结果,在使用了控制模拟器的情况下,无法准确地检查各系统的可动部分
是否相互干扰。如图7所例示,当系统1的可动部分向系统2的可动部分存在的位置移动时,系统1的工具有可能与系统2的可动部分发生干扰。然而,在系统1按照图7所示的移动路径移动的时刻,控制模拟器无法判断系统2的可动部分是否位于图示的位置。因此,难以检查实际是否发生干扰。同样地,控制模拟器无法准确地检查在系统间控制动作的顺序是否正确。
11.在此,在进行事先的干扰检查时,在控制装置中使用手动手柄折返功能、机器锁定运转功能,绘制可动部分的移动路径,由此能够检查系统间的工具的位置关系。然而,手动手柄折返功能需要一边确认可动部分的位置一边依次执行控制用程序的各程序块,因此存在干扰检查花费时间的问题。另外,关于机器锁定运转功能,也至少花费实际执行控制用程序的量的时间,因此与利用控制模拟器进行动作的确认的情况相比,存在检查所花费的时间变长的问题。另外,即使使用了上述任意的功能,在进行检查的期间也独占控制装置和成为控制对象的机械,因此产生在该期间无法使用该机械而机械的运转率降低这样的其他课题。
12.因此,在绘制机械的可动部分的移动路径的模拟器中,要求能够进行考虑了基于控制用程序的控制动作所花费的时间的绘制的技术。
13.用于解决课题的手段
14.本发明的一个方式是一种移动路径绘制装置,其绘制系统的可动部分的移动路径,所述系统基于分别控制机械的多个系统的控制用程序而被控制,其中,所述移动路径绘制装置具备:执行时间存储部,其存储所述控制用程序的各程序块的执行时间;程序解析部,其解析所述控制用程序来生成移动指令数据;移动路径生成部,其根据所述移动指令数据,生成所述可动部分的移动路径;绘制执行控制部,其根据存储在所述执行时间存储部中的所述控制用程序的各程序块的执行时间以及所述移动路径生成部生成的所述可动部分的移动路径,进行表示预定时刻的多个所述系统的可动部分的位置关系的移动路径的绘制执行控制;以及绘制部,其按照所述绘制执行控制部的控制,执行多个所述系统的可动部分的绘制处理。
15.发明效果
16.根据本发明的一个方式,能够以时间序列掌握机械的多个系统的可动部分的动作以及系统间的可能部分的位置关系。因此,能够在实际的加工之前离线地检查在系统间是否没有可动部分的干扰、以及系统间加工的顺序是否正确。由于在这些检查中不需要使用控制装置和机械,因此能够在利用该机械进行加工的过程中进行下一个程序的检查、修正,能够期待机械的运转率的提高。
附图说明
17.图1是一实施方式的移动路径绘制装置的概略硬件结构图。
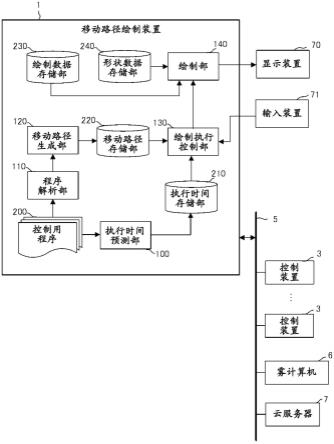
18.图2是第一实施方式的移动路径绘制装置的概略功能框图。
19.图3是各系统的控制用程序的程序块的执行时间的例子。
20.图4是第一实施方式的移动路径绘制装置的概略功能框图。
21.图5是表示在2个系统的可动部分分别安装工具来加工工件的例子的图。
22.图6是表示执行了控制用程序的情况和进行了基于现有技术的控制模拟的情况的
各自的处理时间的图。
23.图7是表示2个系统的可动部分发生干扰的例子的图。
具体实施方式
24.以下,结合附图对本发明的实施方式进行说明。
25.图1是表示本发明的一实施方式的移动路径绘制装置的主要部分的概略硬件结构图。本发明的移动路径绘制装置1例如能够安装为控制工业机械的控制装置。另外,本发明的移动路径绘制装置1能够安装在与控制工业机械的控制装置并列设置的个人计算机、经由有线/无线网络与控制装置连接的个人计算机、雾计算机、云服务器上。在本实施方式中,示出了将移动路径绘制装置1安装在经由网络与控制工业机械的控制装置连接的个人计算机上的例子。
26.本实施方式的移动路径绘制装置1所具备的cpu11是整体地控制移动路径绘制装置1的处理器。cpu11经由总线22读出存储在rom12中的系统程序,按照该系统程序控制移动路径绘制装置1的整体。在ram13中临时存储临时的计算数据、显示数据以及从外部输入的各种数据等。
27.非易失性存储器14例如由利用未图示的电池进行备份的存储器、ssd(solid state drive:固态硬盘)等构成,即使移动路径绘制装置1的电源断开也保持存储状态。在非易失性存储器14中存储经由接口15从外部设备72读入的数据、控制用程序、经由输入装置71输入的数据、控制用程序、从控制机械的控制装置3、雾计算机6、云服务器7等其他计算机取得的各数据等。存储于非易失性存储器14的数据、控制用程序也可以在执行时/利用时在ram13中展开。另外,在rom12中预先写入有公知的解析程序等各种系统程序。
28.接口15是用于连接移动路径绘制装置1的cpu11和usb装置等外部设备72的接口。能够从外部设备72侧读入例如在工业机械的控制中使用的控制用程序、各参数等。另外,在移动路径绘制装置1内编辑后的控制用程序、各参数等能够经由外部设备72存储于外部存储单元,或者经由接口20和网络5向控制装置3、其他计算机发送。
29.在显示装置70中,经由接口18输出并显示读入到存储器上的各数据、作为执行控制用程序、系统程序等的结果而得到的数据等。另外,由键盘、指示设备等构成的输入装置71经由接口19将基于作业者的操作的指令、数据等传递给cpu11。
30.接口20是用于将移动路径绘制装置1的cpu与有线或无线的网络5连接的接口。网络5与控制工业机械的控制装置3、雾计算机6、云服务器7等连接,在与移动路径绘制装置1之间相互进行数据的交换。
31.图2是将本发明的第一实施方式的移动路径绘制装置1所具备的功能作为概略框图而示出的图。本实施方式的移动路径绘制装置1所具备的各功能通过图1所示的移动路径绘制装置1所具备的cpu11执行系统程序并控制移动路径绘制装置1的各部的动作来实现。
32.本实施方式的移动路径绘制装置1具备执行时间预测部100、程序解析部110、移动路径生成部120、绘制执行控制部130、绘制部140。另外,在移动路径绘制装置1的ram13或非易失性存储器14中,预先存储有从输入装置71、外部设备72等取得的用于控制各系统的多个控制用程序200。
33.并且,在移动路径绘制装置1的ram13或非易失性存储器14中预先准备有:执行时
间存储部210,其用于存储控制用程序200的程序块的预测执行时间;移动路径存储部220,其存储基于控制用程序200的程序块的指令的移动路径;绘制数据存储部230,其存储有用于显示模拟结果画面的绘制数据;以及形状数据存储部240,其存储各系统的可动部分的形状数据。
34.执行时间预测部100通过图1所示的移动路径绘制装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11进行使用了ram13、非易失性存储器14的运算处理来实现。执行时间预测部100预测控制用程序200的各程序块的执行时间,并将预测出的结果存储在执行时间存储部210中。执行时间预测部100使用例如日本专利第4980458号公报、日本专利第6050634号公报等公知的加工时间预测所涉及的技术,预测控制用程序200的各程序块的指令所花费的执行时间。将执行时间预测部100预测出的各程序块的执行时间与控制用程序的各程序块关联起来存储于执行时间存储部210中。
35.程序解析部110通过图1所示的移动路径绘制装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11进行使用了ram13、非易失性存储器14的运算处理来实现。程序解析部110读出并解析各个控制用程序200的程序块,生成各个控制用程序200所控制的每个系统的可动部分的移动指令数据。程序解析部110基于由控制用程序200的程序块指示的进给指令、基于校正指令、参数的偏移值等,生成针对使可动部分移动的轴的每个程序块的移动指令数据。将程序解析部110生成的移动指令数据输出到移动路径生成部120。
36.移动路径生成部120通过图1所示的移动路径绘制装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11进行使用了ram13、非易失性存储器14的运算处理来实现。移动路径生成部120基于程序解析部110生成的移动指令数据,针对各系统的可动部分生成控制用程序200的每个程序块的移动路径所涉及的数据。移动路径所涉及的数据是表示可动部分的预定位置(例如,包含于可动部分的工具的刀尖等)的移动路径的数据。移动路径所涉及的数据也可以是预定的坐标系(例如控制对象的工业机械的机械坐标系等)中的向量数据。将移动路径生成部120生成的移动路径所涉及的数据存储在移动路径存储部220中。
37.绘制执行控制部130通过图1所示的移动路径绘制装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11进行使用了ram13、非易失性存储器14的运算处理和使用了接口19的输入处理来实现。绘制执行控制部130基于执行时间预测部100预测出的预测执行时间,进行模拟(绘制)各系统的可动部分沿着移动路径生成部120生成的移动路径同步移动的情况的控制。
38.绘制执行控制部130例如也可以指示绘制部140,以便花费各系统的控制用程序200的各程序块的预测执行时间量的时间来连续地执行移动路径的绘制。在该情况下,绘制执行控制部130向绘制部140指示各系统的可动部分的移动路径及其移动时间(预测执行时间),来绘制各个可动部分的移动路径。此时,绘制部140将被指示的移动路径变换为绘制空间上的向量,以可动部分在该向量上花费预测执行时间而移动的方式绘制移动路径。移动时间的经过例如按照移动路径绘制装置1所具备的未图示的rtc(real time clock,实时时钟)中的时间经过而推进。此时,也可以基于来自输入装置71的操作员的指令,进行对时间的经过速度设定预定的倍率的超控(override)。例如,在操作员将时间的经过速度的倍率设定为10倍的情况下,与普通地执行控制用程序200的情况相比,绘制部140将各系统的可
动部分以10倍的速度移动的情形绘制于显示装置70。
39.绘制执行控制部130例如也可以生成对移动路径生成部120生成的各系统的移动路径进行分割而得到的分割路径,并向绘制部140发出指令,以进行基于所生成的分割路径的步骤执行。在步骤执行中,绘制执行控制部130指示绘制部140在各系统的程序块的执行切换的时间点暂时停止绘制,并指示绘制部140根据来自输入装置71的操作员的输入再次开始绘制。图3是执行时间预测部100预测出的各系统的控制用程序200的程序块的预测执行时间的例子。绘制执行控制部130例如将开始执行控制用程序200的时刻设定为基准时刻t0。然后,绘制执行控制部130基于在执行时间存储部210中存储的预测执行时间,计算出在各系统的控制用程序200的执行中切换各程序块的执行的时刻来作为分割时刻。例如在图3中,在系统2的控制用程序o2000中n202程序块的执行结束而开始n203程序块的执行的分割时刻t3被计算为2.0秒,n203程序块的时刻结束而开始n204程序块的执行的分割时刻t4被计算为2.5秒,在系统1的控制用程序o1000的执行中n102程序块的执行结束而开始n103程序块的执行的分割时刻t5被计算为3.0秒,
…
。然后,绘制执行控制部130基于存储于移动路径存储部220的移动路径所涉及的数据,生成将各移动路径在分割时刻分割后的分割路径所涉及的数据。例如在图3的例子中,绘制执行控制部130生成将根据系统1的控制用程序o1000的n102程序块生成的移动路径在分割时刻t3、分割时刻t4、分割时刻t5的时间点分割后的3个分割路径。绘制执行控制部130可以按照时间按比例分配移动路径来生成分割路径,也可以考虑该移动路径的加减速来生成按比例分配的分割路径。在单纯地按时间按比例分配的情况下,例如根据n102程序块的移动路径,生成将其距离按比例分配为(t
3-t2):(t
4-t3):(t
5-t4)的分割路径。此外,关于在执行期间中没有分割时刻的程序块所涉及的移动路径(在图3的例子中为n100、n101、n103、n105、n200、n201、n202、n203的各程序块),不进行分割而直接作为分割路径来处理。然后,绘制执行控制部130向绘制部140指示分割路径和该分割路径的执行所花费的时间,通过步骤执行来绘制各个可动部分的移动路径。绘制执行控制部130可以依次生成分割路径,也可以预先生成所有的分割路径。
40.绘制执行控制部130例如也可以指示绘制部140,以便绘制从执行控制用程序200起经过了预定的经过时间的时刻(以下,设为绘制时刻)的各系统的可动部分。在该情况下,绘制执行控制部130基于存储于执行时间存储部210的各程序块的预测执行时间和存储于移动路径存储部220的各程序块的移动路径所涉及的数据,计算出该绘制时刻的各系统的可动部分的位置。然后,指示绘制部140执行在计算出的位置绘制各系统的可动部分的处理。绘制执行控制部130可以通过与生成分割路径的情况相同的方法对在绘制时刻执行的各程序块进行分割,计算出绘制时刻的各系统的可动部分的位置。
41.绘制部140通过图1所示的移动路径绘制装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11进行使用了ram13、非易失性存储器14的运算处理和接口18的输出处理来实现。绘制部140基于绘制执行控制部130的指令,使用在绘制数据存储部230中存储的绘制数据和在形状数据存储部240中存储的形状数据,在显示装置70中进行移动路径的绘制(模拟)。在绘制数据存储部230中预先存储有移动路径的绘制所需的坐标系所涉及的信息、包含视点的位置、绘制的倍率、各绘制要素的颜色等的绘制数据。另外,在形状数据存储部240中预先存储有初始的工件、各系统中的可动部分等的形状数据。绘制部140基于来自绘制执行控制部130的指令,生成绘制各系统的可动部分的静态图像或动态图像的图像
数据,并显示到显示装置70。
42.具备上述结构的本实施方式的移动路径绘制装置1能够以时间序列掌握多个系统的可动部分的动作以及系统间的可能部分的位置关系。因此,能够在实际的加工之前离线地检查在系统间是否没有可动部分的干扰、以及在系统间加工的顺序是否正确。移动路径绘制装置1在这些检查中不需要使用控制装置和机械,因此能够在利用该机械进行加工的过程中进行下一个程序的检查、修正,能够期待机械的运转率的提高。
43.图4是将本发明的第二实施方式的移动路径绘制装置1所具备的功能作为概略框图而示出的图。本实施方式的移动路径绘制装置1所具备的各功能通过图1所示的移动路径绘制装置1所具备的cpu11执行系统程序并控制移动路径绘制装置1的各部的动作来实现。
44.本实施方式的移动路径绘制装置1除了第一实施方式的移动路径绘制装置1所具备的功能之外,还具备干扰判定部150。
45.干扰判定部150通过图1所示的移动路径绘制装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11进行使用了ram13、非易失性存储器14的运算处理来实现。干扰判定部150在由绘制部140进行的各系统的可动部分的移动路径的绘制时,判定各系统的可动部分是否有干扰的可能性。干扰判定部150例如也可以在绘制部140绘制的各系统的可动部分之间的距离成为预先决定的预定的阈值以内时,判定为存在该可动部分干扰的可能性。干扰判定部150例如也可以在绘制部140绘制的各系统的可动部分之间的距离成为预先决定的预定的阈值以内、且之后该可动部分之间的距离向缩短的方向变化的情况下,判定为存在该可动部分干扰的可能性。干扰判定部150也可以在判定为各系统的可动部分存在干扰的可能性时,对绘制部140进行指示,以使绘制处理(模拟处理)暂时停止而将存在干扰的可能性的意思显示于显示装置70。
46.具备上述结构的本实施方式的移动路径绘制装置1在进行能够以时间序列掌握多个系统的可动部分的动作以及系统间的可能部分的位置关系的模拟处理时,在有可能发生可动部分间的干扰的情况下,能够暂时停止模拟处理并向操作员进行通知。
47.以上,对本发明的一实施方式进行了说明,但本发明并不仅限定于上述的实施方式的例子,能够通过施加适当的变更而以各种方式实施。
48.例如,在上述的实施方式中,移动路径绘制装置1成为包含执行时间预测部100的结构,但执行时间预测部100自身不是移动路径绘制装置1所必须的结构。例如,如果在通过外部的个人计算机等预测了控制用程序200的各程序块的执行时间的基础上,能够经由网络5、外部设备72取得预测出的各程序块的执行时间的数据,则能够灵活运用移动路径绘制装置1的功能。另外,各程序块的执行时间不需要是预测的时间。例如,也可以个别地执行各系统所涉及的控制用程序200来测量各程序块的执行时间,经由网络5、外部设备72取得并灵活运用测量出的执行时间的数据。
49.符号说明
50.1移动路径绘制装置
51.3控制装置
52.5网络
53.6雾计算机
54.7云服务器
55.11cpu
56.12rom
57.13ram
58.14非易失性存储器
59.15、18、19、20接口
60.22总线
61.70显示装置
62.71输入装置
63.72外部设备
64.100执行时间预测部
65.110程序解析部
66.120移动路径生成部
67.130绘制执行控制部
68.140绘制部
69.200控制用程序
70.210执行时间存储部
71.220移动路径存储部
72.230绘制数据存储部
73.240形状数据存储部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。