1.本发明有关于一种晶圆承载盘固定装置,尤指一种应用该晶圆承载盘固定装置的沉积机台,用以将晶圆固定在承载盘上,并对晶圆进行薄膜沉积制程。
背景技术:
2.化学气相沉积(cvd)、物理气相沉积(pvd)及原子层沉积(ald)皆是常用的沉积机台,并普遍被使用在集成电路、发光二极管及显示器等制程中。
3.沉积的设备主要包括一腔体及一晶圆承载盘,其中晶圆承载盘位于腔体内,并用以承载至少一晶圆。以物理气相沉积为例,腔体内需要设置一靶材,其中靶材面对晶圆承载盘上的晶圆。在进行物理气相沉积时,会通过固定装置将晶圆固定在晶圆承载盘上,并将惰性气体及/或反应气体输送至腔体内,分别对靶材及晶圆承载盘施加偏压,其中晶圆承载盘还会加热承载的晶圆。腔体内的惰性气体会因为高压电场的作用,形成离子化的惰性气体。离子化的惰性气体会受到靶材上的偏压吸引而轰击靶材。从靶材溅出的靶材原子或分子会受到晶圆承载盘上的偏压吸引,并沉积在加热的晶圆的表面,以在晶圆的表面形成薄膜。
4.一般而言,半导体设备制造商制作的沉积机台通常只适用于单一种尺寸的晶圆,若要对不同尺寸的晶圆进行沉积,往往需要大幅度的更改沉积机台的构造,或者是添购不同规格的沉积机台。不仅造成使用上的不便,更会大幅增加制程的成本。
技术实现要素:
5.如先前技术所述,习用的沉积机台通常只能对单一尺寸的晶圆进行沉积,进而造成使用上的不便,并可能会大幅增加制程的成本。为此本发明提出一种新颖的晶圆承载固定机构及应用该晶圆承载固定机构的沉积机台,可用以将两种以上尺寸的晶圆固定在承载盘上并进行沉积,有利于提高晶圆承载固定机构及沉积机台的适用范围,并可降低制程的成本。
6.本发明的一目的,在于提出一种晶圆承载固定机构,主要包括一承载盘、一第一盖环及一第二盖环,其中承载盘用以承载至少一晶圆。第一盖环用以承载第二盖环,其中第二盖环的周长或半径小于第一盖环,并放置在第一盖环的内侧。当承载盘带动承载的晶圆朝第二盖环的方向靠近时,第二盖环将会接触晶圆,并将晶圆固定在承载盘上。
7.本发明的承载盘及第二盖环上分别设置对应的对位单元,当承载盘朝第二盖环靠近并连接第二盖环时,对位单元会引导及对位第二盖环及承载盘,使得第二盖环被放置载承载盘的固定区域,以准确的接触并固定承载盘上的晶圆。
8.在实际应用时可将第二盖环由第一盖环上取下,并以具有较大半径或周长的第一盖环将较大尺寸的晶圆固定在承载盘上。此外将第二盖环放置在第一盖环上时,则可以具有较小半径或周长的第二盖环将较小尺寸的晶圆固定在承载盘上,使得晶圆承载固定机构适用于固定两种不同尺寸的晶圆,并可用以对两种不同尺寸的晶圆进行薄膜沉积。
9.此外当晶圆的周围翘曲时,承载盘上的晶圆有可能会推动第二盖环相对于第一盖
环位移,例如晶圆朝靶材的方向上顶第二盖环。由于第二盖环的重量小于第一盖环或第一与第二盖环的总和,可避免将晶圆固定在承载盘或晶圆推动第二盖环时造成晶圆的破损。
10.本发明的一目的,在于提出一种晶圆承载固定机构,主要包括一承载盘及一承载构件,其中承载盘的一承载面用以承载至少一晶圆,而承载构件则设置在承载盘上,并位于晶圆的下方。
11.承载构件连接至少一升降单元,并通过升降单元驱动承载构件相对于承载盘位移。当升降单元驱动承载构件离开承载盘时,承载构件会带动晶圆离开承载盘的承载面,以利于通过一机械手臂拿取承载构件上的晶圆,或者是将晶圆放置在承载构件上。而后升降单元可驱动承载构件朝承载盘位移,并将晶圆放置在承载盘的承载面。
12.为了达到上述的目的,本发明提出一种晶圆承载固定机构,用以承载及固定至少一晶圆,包括:一承载盘,包括至少一第一对位单元及一承载面,其中承载面用以承载晶圆,而第一对位单元则环绕设置在承载面的周围;一第一盖环,位于承载盘的上方;及一第二盖环,连接第一盖环,并包括一第二对位单元对应第一对位单元,其中第一盖环的周长大于第二盖环,并用以承载第二盖环,承载盘朝第二盖环位移时,第二盖环会接触承载盘上的晶圆,而第二盖环的第二对位单元会接触承载盘的第一对位单元,并用以对位第二盖环及承载盘。
13.本发明提供一种沉积机台,包括:一腔体,包括一容置空间;至少一挡件,位于腔体的容置空间内,其中挡件的一端具有一环形凸缘,并于环形凸缘的内侧形成一开口;一晶圆承载固定机构,位于容置空间内,并用以承载至少一晶圆,包括:一承载盘,包括至少一第一对位单元及一承载面,其中承载面用以承载晶圆,而第一对位单元则环绕设置在承载面的周围;一第一盖环,设置在挡件的环形凸缘上;一第二盖环,连接第一盖环,并包括一第二对位单元对应第一对位单元,其中第一盖环的周长大于第二盖环,并用以承载第二盖环;及一支撑件,连接并带动承载盘相对于挡件位移,其中支撑件带动承载盘朝挡件位移时,第二盖环会接触承载盘上的晶圆,而第二盖环的第二对位单元会接触承载盘的第一对位单元,并用以对位第二盖环及承载盘。
14.所述的晶圆承载固定机构及沉积机台,包括:一承载构件,设置在承载盘上,并位于晶圆的下方,其中承载构件包括一第一承载部及一第二承载部,第一承载部包括一缺口,而第二承载部则位于缺口内;及至少一升降单元,连接承载构件的第一承载部,并用以带动承载构件的第一承载部及晶圆相对于承载盘位移,其中升降单元带动承载构件的第一承载部离开承载盘时,承载构件及第一承载部会带动晶圆离开承载盘的承载面。
15.所述的晶圆承载固定机构及沉积机台,其中第一盖环包括至少一第三对位单元,而第二盖环则包括至少一第四对位单元,第四对位单元位于第二盖环的一下表面的外侧,而第二对位单元则位于第二盖环的下表面的内侧,第二盖环连接第一盖环时,第四对位单元会接触第三对位单元,以对位第二盖环及第一盖环。
16.所述的晶圆承载固定机构及沉积机台,包括一环形构件连接承载盘,环形构件位于承载盘的承载面的周围,其中第一盖环包括至少一第五对位单元,环形构件包括至少一第六对位单元,第一盖环连接环形构件时,第五对位单元会接触第六对位单元,以对位环形构件及第一盖环。
17.所述的晶圆承载固定机构及沉积机台,其中承载盘的第一对位单元为一凹槽,而
第二盖环的第二对位单元为一凸出部,凹槽及凸出部具有对应的一倾斜面,第二盖环的凸出部进入承载盘的凹槽,以对位第二盖环及承载盘。
18.本发明的有益效果是:提供一种新颖的晶圆承载固定机构及应用该晶圆承载固定机构的沉积机台,可用以准确的将两种以上尺寸的晶圆固定在承载盘上并进行沉积,有利于提高晶圆承载固定装置及沉积机台的适用范围,并可降低制程的成本。
附图说明
19.图1为本发明晶圆承载固定机构一实施例的立体分解示意图。
20.图2为本发明晶圆承载固定机构一实施例的部分构造的放大分解示意图。
21.图3为本发明晶圆承载固定机构又一实施例的部分构造的放大示意图。
22.图4至图6为本发明晶圆承载固定机构一实施例的动作流程示意图。
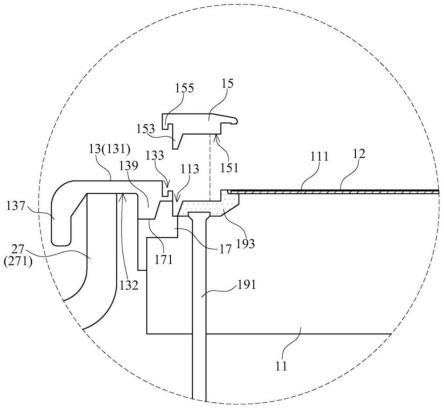
23.图7为本发明沉积机台一实施例的剖面示意图。
24.附图标记说明:10:晶圆承载固定机构;11:承载盘;111:承载面;113:第一对位单元;12:晶圆;13:第一盖环;130:第一开口;131:上表面;132:下表面;133:第三对位单元;137:凸缘;139:第五对位单元;15:第二盖环;150:第二开口;151:下表面;153:第二对位单元;155:第四对位单元;17:环形构件;171:第六对位单元;191:升降单元;193:承载构件;1931:第一承载部;1932:缺口;1933:第二承载部;1934:间隙;20:沉积机台;21:腔体;211:进气口;215:晶圆进出口;22:容置空间;23:支撑件;26:靶材;27:挡件;271:环形凸缘
具体实施方式
25.请参阅图1及图2,分别为本发明晶圆承载固定机构一实施例的立体分解示意图及部分构造的放大分解示意图。如图所示,晶圆承载固定机构10用以承载及固定至少一晶圆12,主要包括至少一承载盘11、一第一盖环13及一第二盖环15,其中加第一盖环13及第二盖环15位于承载盘11及晶圆12上方。
26.承载盘11包括一承载面111,用以承载晶圆12。第一盖环13及第二盖环15的俯视形状为环形,其中第一盖环13的最大周长及/或最大半径大于第二盖环15的最大周长及/或最大半径。第二盖环15位于第一盖环13的上方,并以第一盖环13承载第二盖环15。当承载盘11朝第一盖环13及/或第二盖环15位移时,第二盖环15会接触承载盘11承载的晶圆12的边缘,并将晶圆12固定在承载盘11的承载面111。
27.具体而言,第一盖环13包括一第一开口130,而第二盖环15包括一第二开口150,其中第一开口130的半径、周长及/或面积大于第二开口150,且第二盖环15的最大半径及/或最大周长大于第一开口130。因此可将第二盖环15设置或放置在第一盖环13的内侧或径向靠内侧,其中第二盖环15放置在第一盖环13时,部分的第二盖环15的内侧会凸出第一盖环13的内侧,并覆盖部分的第一开口130,例如部分的第二盖环15朝第一盖环13的径向内侧凸出。
28.第二盖环15的重量小于第一盖环13及第一盖环13与第二盖环15的总和,其中第二盖环15施加在晶圆12上的力较小,可防止晶圆12承受过大的压力,而导致破损的情形发生,因此本发明所述的晶圆承载固定机构10特别适用于将厚度较薄的晶圆12固定在承载盘11上。
29.具体而言,如图3及图5所示,当承载盘11带动边缘翘曲的晶圆12朝第一盖环13及/或第二盖环15的方向靠近时,第二盖环15会接触并对晶圆12翘曲的边缘施压,以将晶圆12固定在承载盘11的承载面111上。若晶圆12的边缘的翘曲幅度较大时,晶圆12翘曲的边缘可能会推顶第二盖环15,使得第二盖环15相对第一盖环13位移,例如第二盖环15可能会稍微离开第一盖环13。此时晶圆12只需要承受第二盖环15的重量,而不需要承受第一盖环13的重量,可避免晶圆12因承受过大的压力而发生破损的情形。
30.本发明所述的承载盘11包括至少一第一对位单元113,环绕设置在承载面111的周围,而第二盖环15则包括至少一第二对位单元153,其中承载盘11的第一对位单元113对应第二盖环15的第二对位单元153。
31.具体而言,当第二盖环15靠近或接触承载盘11时,第二盖环15的第二对位单元153会接触或对准承载盘11的第一对位单元113,并将第二盖环15引导致承载盘11的固定位置,使得承载盘11及第二盖环15相互对准。通过第一对位单元113及第二对位单元153的设置,可使得第二盖环15接触承载盘11上的晶圆12的固定区域,以确实将晶圆12固定在承载盘11上。
32.在本发明一实施例中,承载盘11的第一对位单元113可以是一具有倾斜面的凹槽,而第二盖环15的第二对位单元153可以是一具有倾斜面的凸出部。例如第一对位单元113可以是具有倾斜面的环形凹槽,并设置在承载盘11的承载面111周围,而第二对位单元153可以是具有倾斜面的环形凸出部,并设置在第二盖环15的下表面151靠近径向外侧。在本发明另一实施例中,承载盘11的第一对位单元113可以是环绕设置在承载面111周围的斜面,而第二盖环15的第二对位单元153朝径向内侧则设置有对应的斜面,以对位第二盖环15及承载盘11。
33.在本发明一实施例中,第一盖环13包括至少一第三对位单元133,而第二盖环15则包括至少一第四对位单元155,其中第四对位单元155位于第二盖环15的径向靠外侧的下表面151,而第二对位单元153则位于第二盖环15的径向靠内侧的下表面151。当第二盖环15放置在第一盖环13上时,第四对位单元155会接触并对准第三对位单元133,以对位第二盖环15及第一盖环13。
34.如图2所示,第一盖环13的第三对位单元133可包括至少一凹槽及/或至少一凸部,其中第三对位单元133设置于第一盖环13的上表面131。第二盖环15的第四对位单元155可包括至少一凹槽及/或至少一凸部,其中第四对位单元155设置于第二盖环15的下表面151。例如第一盖环13及第二盖环15的凹槽为环形凹槽,而第一盖环13及第二盖环15的凸部则为环形凸出部。
35.第三对位单元133对应第四对位单元155,在将第二盖环15放置在第一盖环13上的时候,第三对位单元133及第四对位单元155可将第二盖环15引导至第一盖环13的固定位置,以完成第一盖环13与第二盖环15的连接及对位。
36.此外第一盖环13的下表面132可设置至少一凸缘137及至少一第五对位单元139,其中凸缘137及第五对位单元139可为环形凸出部。在本发明一实施例中,凸缘137连接第一盖板13的外缘或径向靠外侧,而第五对位单元139则位于凸缘137的内侧或径向靠内侧。承载盘11上可设置一第六对位单元171,其中第六对位单元171位于承载盘11的径向靠外侧,而第一对位单元113则位于承载盘11的径向靠内侧,并可通过第五对位单元139及第六对位
单元171对位第一盖环13及承载盘11。
37.在实际应用时,可将第二盖环15放置在第一盖环13上,并通过第二盖环15将尺寸较小的晶圆12固定在承载盘11上。此外,亦可将第二盖环15由第一盖环13上取下,并通过第一盖环13将尺寸较大的晶圆12固定在承载盘11上。在以第一盖环13将较大尺寸的晶圆12固定在承载盘11时,有可能需要更换承载盘11或在承载盘11上配置额外的构件。
38.在本发明一实施例中,晶圆承载固定机构10可包括一环形构件17,其中环形构件17连接承载盘11,并位于承载盘11的承载面111及/或晶圆12的周围,例如环形构件17可套设在部分的承载盘11上,如图2所示。
39.环形构件17及第一盖环13包括至少一对应的对位单元,以对位环形构件17及第一盖环13。例如环形构件17的上表面可包括至少一第六对位单元171,其中第六对位单元171对应第一盖环13的第五对位单元139,第一盖环13连接环形构件17时,第五对位单元139会接触第六对位单元171,以对位环形构件17及第一盖环13。
40.在本发明实施例中,主要通过在承载盘11上设置第一对位单元113,并在第二盖环15上设置第二对位单元153,以对位第二盖环15及承载盘11。若承载盘11及第二盖环15之间未设置对应的对位单元,如第一对位单元113及第二对位单元153,则承载盘11朝第一盖环13及第二盖环15靠近时,第一盖环13会通过第五对位单元139对位承载盘11的第六对位单元171,使得第一盖环13对位承载盘11,而第二盖环15则经由第一盖环13对位承载盘11。
41.由于第二盖环15与承载盘11之间是通过间接的方式对位,有可能会造成第二盖环15与承载盘11之间的对位产生误差,导致第二盖环15无法准确的接触承载盘11上的晶圆12,而无法将晶圆12固定在承载盘11的承载面111上。
42.为了改善第二盖环15与承载盘11之间对位的误差,本发明提出在承载盘11上设置第一对位单元113,并于第二盖环15上设置第二对位单元153,可大幅提高第二盖环15与承载盘11之间对位的准确度,使得第二盖环15可以接触并固定晶圆12的特定区域或边缘。
43.在本发明一实施例中,晶圆承载固定机构10可包括至少一升降单元191及一承载构件193,其中承载构件193设置在承载盘11上,并位于承载盘11承载的晶圆12下方,例如承载构件193的外观可为环状,并位于环形构件17的内侧。升降单元191连接承载构件193及承载盘11,并用以带动承载构件193相对于承载盘11位移,例如升降单元191可相对于承载盘11的承载面111伸长,并带动承载构件193离开承载盘11,以通过承载构件193带动晶圆12离开承载盘11的承载面111。
44.在本发明另一实施例中,升降单元191连接承载盘11,并位于承载盘11承载的晶圆12下方。升降单元191可相对于承载盘11的承载面111伸长,并带动晶圆12离开承载盘11的承载面111,如此一来便不需要设置承载构件193。
45.在实际应用时,如图2及图4所示,可将第一盖环13放置在一挡件27上,其中挡件27的一端可形成一环形凸缘271。挡件27的环形凸缘271位于第一盖环13的凸缘137及第五对位单元139之间,并用以承载第一盖环13。
46.承载盘11连接一支撑件23,其中支撑件23用以带动承载盘11相对于挡件27及其承载的第一盖环13与第二盖环15位移,如图5所示,使得第二盖环15接触承载盘11承载的晶圆12,并将晶圆12固定在承载盘11上。第二盖环15在接触晶圆12之前,第二盖环15的第二对位单元153会先接触承载盘11的第一对位单元113,以对准第二盖环15及承载盘11,使得第二
盖环15可以接触晶圆12的固定位置。
47.在本发明一实施例中,如图6所示,支撑件23带动承载盘11离开挡件27、第一盖环13及第二盖环15后,可进一步通过升降单元191带动承载构件193离开承载盘11,使得承载构件193抬起原本位于承载盘11的承载面111上的晶圆12,并在晶圆12与承载盘11的承载面111之间形成一间隙1934。一机械手臂(未显示)可伸入间隙1934内,并位于晶圆12的下方,以将承载构件193上的晶圆12取出,或者是将晶圆12放置到承载构件193上。
48.当机械手臂将晶圆12放置在承载构件193后,升降单元191会带动承载构件193及其承载的晶圆12朝承载盘11的承载面111位移,以将晶圆12放置在承载盘11的承载面111上,如图4所示。
49.在本发明另一实施例中,如图6所示,承载构件193包括一第一承载部1931及一第二承载部1933,其中第一承载部1931包括一缺口1932,而第二承载部1933则位于缺口1932内。具体而言,承载构件193的外观可为环状,第一承载部1931及第二承载部1933为部分环状构造,当第二承载部1933位于第一承载部1931的缺口1932内时,两者会形成环状的承载构件193。
50.此外升降单元191仅连接第一承载部1931,其中升降单元191用以带动第一承载部1931及晶圆12离开承载盘11的承载面111,以利于机械手臂经由第一承载部1931的缺口1932拿取晶圆12,或者是经由缺口1932将晶圆12放置在第一承载部1931。
51.请参阅图7,为本发明沉积机台一实施例的剖面示意图。如图所示,沉积机台20包括至少一晶圆承载固定机构10及一腔体21,其中腔体21包括一容置空间22,而晶圆承载固定机构10则位于容置空间22内,并用以承载至少一晶圆12。
52.如图1所示,晶圆承载固定机构10主要包括至少一承载盘11、一第一盖环13及一第二盖环15,其中第一盖环13及第二盖环15位于承载盘11及晶圆12上方。第一盖环13及第二盖环15的俯视形状为环形,其中第一盖环13的最大周长及/或最大半径大于第二盖环15的最大周长及/或最大半径。
53.腔体21的容置空间22内设置至少一挡件27,其中挡件27的一端连接腔体21,而另一端则形成一开口。在本发明一实施例中,挡件27未连接腔体21的一端可形成一环形凸缘271,并于环形凸缘271内侧形成开口。挡件27的环形凸缘271用以承载第一盖环13,而第一盖环13则用以承载第二盖环15。
54.在本发明一实施例中,沉积机台20可以是物理气相沉积装置,并于腔体21内设置一靶材26,其中靶材26面对承载盘11及/或晶圆12。腔体21设置至少一进气口211,其中进气口211流体连接腔体21的容置空间22,并用以将一制程气体输送至容置空间22内,以进行沉积制程,例如制程气体可以是惰性气体或反应气体。此外亦可于腔体21上设置一抽气口,并通过帮浦经由抽气口将腔体21内的气体抽出。
55.腔体21可包括一晶圆进出口215,并可通过机械手臂经由晶圆进出口215将晶圆12输送至腔体21内,或者是经由晶圆进出口215将腔体21内的晶圆12取出。
56.在本发明一实施例中,承载盘11连接一支撑件23,其中支撑件23用以带动承载盘11相对于挡件27、第一盖环13与第二盖环15位移,如图5所示,支撑件23带动承载盘11朝挡件27位移,使得第二盖环15接触承载盘11承载的晶圆12,以将晶圆12固定在承载盘11上。
57.如图6及图7所示,支撑件23带动承载盘11离开挡件27、第一盖环13及第二盖环15
后,可进一步通过升降单元191带动承载构件193或第一承载部1931离开承载盘11,使得承载构件193或第一承载部1931抬起原本位于承载盘11的承载面111上的晶圆12,并在晶圆12及承载盘11的承载面111之间形成一间隙1934,以利于通过一机械手臂(未显示)经晶圆进出口215将承载构件193或第一承载部1931承载的晶圆12取出腔体21,或者是经由晶圆进出口215将晶圆12放置到承载构件193或第一承载部1931上。
58.当机械手臂将晶圆12放置在承载构件193或第一承载部1931后,升降单元191会带动承载构件193及其承载的晶圆12朝承载盘11的承载面111位移,以将晶圆12放置在承载盘11的承载面111上,如图4所示。
59.而后支撑件23可带动承载盘11及晶圆12朝第一盖环13及/或第二盖环15的方向位移,并与第一盖环13及/或第二盖环15接触,如图5所示。第二盖环15在接触承载盘11的过程中,第一对位单元113及第二对位单元153会引导第二盖环15,以完成第二盖环15与承载盘11之间的对位,并使得第二盖环15位于承载盘11的固定区域。
60.本发明优点:
61.提供一种新颖的晶圆承载固定机构及应用该晶圆承载固定机构的沉积机台,可用以准确的将两种以上尺寸的晶圆固定在承载盘上并进行沉积,有利于提高晶圆承载固定装置及沉积机台的适用范围,并可降低制程的成本。
62.以上所述,仅为本发明的一较佳实施例而已,并非用来限定本发明实施的范围,即凡依本发明申请专利范围所述的形状、构造、特征及精神所为的均等变化与修饰,均应包括于本发明的申请专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。