1.本技术涉及摄像模组的组装领域,尤其涉及基于准直仪的用于潜望式摄像模组的组装系统的校正方法,其能够以准直仪对潜望式摄像模组的组装系统进行校正,以提高潜望式摄像模组的组装系统的组装精度,保证良率。
背景技术:
2.随着移动电子设备的普及,被应用于移动电子设备的用于帮助使用者获取影像(例如,视频或者图像)的摄像模组的相关技术得到了迅猛的发展和进步。随着市场需求的变化和发展,配置于移动电子设备(例如,智能手机)的摄像模组也随之改变,近年来对长焦摄像模组提出了需求(这里,长焦摄像模组指的是具有较大有效焦距的摄像模组),例如,在需要实现多倍变焦拍摄功能的移动电子设备中,长焦摄像模组是必备的模组。
3.随着变焦倍数的增加,长焦摄像模组的总焦距会随之增大,这导致摄像模组的整体高度尺寸不断增高,难以适配电子设备轻薄化的发展趋势。为了解决摄像模组的高度设计和高倍变焦拍摄功能之间的技术矛盾,一些厂商采用潜望式摄像模组来替代传统的直立式摄像模组。相较于传统的直立式摄像模组,潜望式摄像模组中设有光转折元件(例如,棱镜、反射镜等)来改变成像光学路径,从而实现摄像模组整体高度尺寸的降低的同时满足具有较大有效焦距的光学设计需求。
4.然而,潜望式摄像模组具有相对更为复杂的结构,这一方面导致了其成本的上升,另一方面,也直接导致其工艺难度的增加,例如,其组装工艺难度的增加。
5.相应地,这就模组厂商的用于组装潜望式摄像模组的组装设备和组装方式有着较优的精度控制,以提高组装精度和保证良率。
技术实现要素:
6.本技术的一优势在于提供一种基于准直仪的用于潜望式摄像模组的组装系统的校正方法和用于潜望式摄像模组的组装系统,其以准直仪并使用特定的校准方案对潜望式摄像模组的组装系统进行校正,以提高潜望式摄像模组的组装系统的组装精度,保证良率。
7.通过下面的描述,本技术的其它优势和特征将会变得显而易见,并可以通过权利要求书中特别指出的手段和组合得到实现。
8.为实现上述至少一优势,本技术提供一种基于准直仪的用于潜望式摄像模组的组装系统的校正方法,其中,所述组装系统包括标板、增距单元、基座、安装于所述基座上的求心治具和夹具,以及,夹爪治具,所述增距单元包括承载镜筒、安装于所述承载镜筒内的增距透镜和与所述增距透镜所设定的光轴成预设夹角的反射元件,其中,所述校正方法,包括:
9.以预设姿态将所述增距单元安装于预设位置;
10.调整准直仪相对于所述增距单元的位置关系,并在所述准直仪与所述增距单元的相对位置关系确定后将所述准直仪安装于所述承载镜筒的上端面;
11.调整所述求心治具与所述夹爪治具之间的相对位置关系,并记录所述夹爪治具的速度切换点位和第一夹放点位,其中,所述速度切换点位用于表示所述夹爪治具在靠近或远离所述求心治具的过程中速度被切换的位置;所述夹放点位用于表示所述夹爪治具放置被夹对象于所述求心治具和所述夹爪治具从所述求心治具中夹取被求心后的该被夹对象的位置,其中,在校正过程中,该被夹对象为标准件,所述标准件与待检测潜望式摄像模组具有相同的形状和尺寸参数,且所述标准件在其一侧端部设有反射单元;
12.通过所述准直仪和被所述夹爪治具所夹持的所述标准件,调整所述夹爪治具的位姿,并记录所述夹爪治具的第二夹放点位,所述第二夹放点位用于表示所述夹爪治具将该被夹对象放置于夹具的位置;
13.基于所述准直仪,调整所述标板相对于所述增距单元的位置关系;以及
14.调整所述夹具相对于所述夹爪治具的位置关系,并记录所述夹具的预定位位置,所述预定位位置用于表示接收来自所述夹爪治具的该被夹对象的位置。
15.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,调整准直仪相对于所述增距单元之间的位置关系,包括:在所述增距单元的所述承载镜筒的上端面上设置一第一平面反射镜,其中,所述第一平面反射镜抵靠于所述上端面;以所述准直仪测量所述第一平面反射镜的水平度;以及,基于所述水平度,调整所述准直仪相对于所述第一平面反射镜的位置关系直到所述平面镜的水平度满足预设要求。
16.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,所述准直仪包括准直单元、紧固元件和承载框架,其中,所述准直单元通过所述紧固元件被固定于所述承载框架的上端面,所述准直单元用于测量所述第一平面反射镜的水平度,其中,基于所述水平度,调整所述准直仪相对于所述第一平面反射镜的位置关系直到所述平面镜的水平度满足预设要求,包括:基于所述水平度,调整所述紧固件以调整所述准直单元相对于所述第一平面反射镜的位置关系。
17.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,在所述准直仪与所述增距单元的相对位置关系确定后将所述准直仪安装于所述承载镜筒的上端面,包括:移除所述第一平面反射镜;以及,将所述准直仪的承载框架安装于所述承载镜筒的上端面。
18.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,调整所述求心治具与所述夹爪治具之间的相对位置关系,并记录所述夹爪治具的速度切换点位和第一夹放点位,包括:通过视觉定位系统调整所述求心治具与所述夹爪治具之间的相对位置关系,以使得所述求心治具对齐于所述夹爪治具;以及,通过所述求心治具的第一激光检测装置和所述夹爪治具的第二激光检测装置,确定所述夹爪治具的速度切换点位和第一夹放点位。
19.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,通过所述准直仪和被所述夹爪治具所夹持的所述标准件,调整所述夹爪治具的位姿,并记录所述夹爪治具的第二夹放点位,包括:调整安装于所述增距单元的所述准直仪的位置,以使得所述准直仪所投射的激光在通过所述增距单元后能够被所述标准件的所述反射单元反射回来,其中,所述准直仪所投射的激光在沿着第一方向穿过所述增距单元的所述增距透镜后被所述增距单元的所述反射元件所转折以沿着第二方向抵达所述标准件的所述反射单元;以所述
准直仪测量所述反射单元的垂直度;以及,基于所述垂直度,调整所述夹爪治具的位姿直至所述垂直度满足预设要求。
20.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,基于所述准直仪,调整所述标板相对于所述增距单元的位置关系,包括:在所述标板的下表面设置一第二平面反射镜;以安装于所述增距单元的所述准直仪测量所述第二平面反射镜的水平度;以及,基于所述第二平面反射镜的水平度,调整所述标板相对于所述增距单元的位置关系直到所述水平度满足预设要求。
21.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,所述第二平面反射镜被安装于所述标板的下表面的中间区域。
22.在上述基于准直仪的用于潜望式摄像模组的组装系统的校正方法中,调整所述夹具相对于所述夹爪治具的位置关系,并记录所述夹具的预定位位置,包括:通过视觉定位系统调整所述夹具的位姿,以调整所述夹具相对于所述夹爪治具的位置关系。
23.根据本技术的另一方面,还提供了一种用于潜望式摄像模组的组装系统,其中,所述组装系统以如上所述的基于准直仪的用于潜望式摄像模组的组装系统的校正方法进行校正。
24.通过对随后的描述和附图的理解,本技术进一步的目的和优势将得以充分体现。
25.本技术的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
26.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
27.图1图示了现有的用于潜望式摄像模组的组装系统的示意图。
28.图2图示了在现有的组装系统中所述标板的一个具体示例的示意图。
29.图3图示了在现有的组装系统中所述增距单元的一个具体示例的示意图。
30.图4图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正方法的流程图。
31.图5图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正过程的示意图之一。
32.图6图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正过程的示意图之二。
33.图7图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正过程的示意图之三。
34.图8图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正过程的示意图之四。
35.图9图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正过程的示意图之五。
36.图10图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正过程的示意图之六。
具体实施方式
37.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
38.申请概述
39.如前所述,相较于传统的直立式摄像模组,潜望式摄像模组具有相对更为复杂的结构,这导致其组装工艺难度的增加。相应地,这就模组厂商的用于组装潜望式摄像模组的组装设备和组装方式有着较优的精度控制,以提高组装精度和保证良率。
40.图1图示了现有的用于潜望式摄像模组的组装系统的示意图。如图1所示,现有的用于潜望式摄像模组的组装系统,包括:标板10、增距单元20、基座30、安装于基座30上的求心治具40和夹具50,以及,夹爪治具60。
41.在组装过程中,首先,所述夹爪治具60从物料盘(图中未示意)中夹取待组装潜望式摄像模组;接着,夹爪治具60将该待组装潜望式摄像模组放置于求心治具40中,以通过所述求心治具40对该待组装潜望式摄像模组进行求心;在被求心后,所述夹爪治具60从所述求心治具40重新夹取该待组装潜望式摄像模组,并将该待组装潜望式摄像模组放置于所述夹具50上;接着,以主动校准的思想,调整该待组装潜望式摄像模组中各个部件之间的相对位置关系。具体地,所述标板10投射测试图案,该测试图案在通过增距单元20后被该待组装潜望式摄像模组所采集并成像,进而,可通过该测试图案的成像质量来调整该待组装潜望式摄像模组中各个部件之间的相对位置关系。
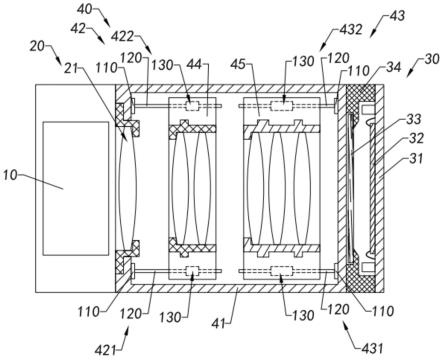
42.在组装过程中,所述增距单元20被设置于所述标板10的下方,用于接收来自标板10的所述测试图案。顾名思义,所述增距单元20的作用在于增加所述待组装潜望式摄像模组的光学后焦值,以满足长焦摄像模组的成像质量检测,也就是,增加所述潜望式摄像模组与被摄目标之间的光学总长。图2图示了在现有的组装系统中所述标板10的一个具体示例的示意图。如图2所示,在该具体示例中,所述标板10为主动发光式标板,其包括光源11和对应于所述光源11的标板图案12,当然,在其他示例中,所述标板10还可以是被动式标板10。图3图示了在现有的组装系统中所述增距单元20的一个具体示例的示意图。如图3所示,在该具体示例中,所述增距单元20,包括:承载镜筒21、安装于所述承载镜筒21内的增距透镜22和与所述增距透镜22所设定的光轴成预设夹角的反射元件23。特别地,在该具体示例中,所述反射元件23被实施为平面反射镜,其与所述增距透镜22所设定的光轴成45
°
夹角。
43.应可以理解,在通过该用于潜望式摄像模组的组装系统对待组装潜望式摄像模组进行组装前,需对所述组装系统中各个部件,以及,部件与部件之间的相对位置关系进行校正,以避免所述组装系统自身引入组装误差。也就是,如果组装系统自身存在误差,则这部分误差将被引入至待组装的潜望式摄像模组中。
44.在传统的用于直立式摄像模组的组装系统的校正方案中,通常以对心的方式对用于直立式摄像模组的组装系统中的各个部件和部件与部件之间的关系进行校正。然而,潜望式摄像模组具有光路转折的特点,无法进行倾斜(tilt)校正。
45.基于此,本技术发明人以准直仪为基准并使用特定的校准方案对潜望式摄像模组的组装系统进行校正,以提高潜望式摄像模组的组装系统的组装精度,保证良率。
46.基于此,本技术提供了一种基于准直仪的用于潜望式摄像模组的组装系统的校正方法,其包括:以预设姿态将所述增距单元安装于预设位置;调整准直仪相对于所述增距单元的位置关系,并在所述准直仪与所述增距单元的相对位置关系确定后将所述准直仪安装于所述承载镜筒的上端面;调整所述求心治具与所述夹爪治具之间的相对位置关系,并记录所述夹爪治具的速度切换点位和第一夹放点位,其中,所述速度切换点位用于表示所述夹爪治具在靠近或远离所述求心治具的过程中速度被切换的位置;所述夹放点位用于表示所述夹爪治具放置被夹对象于所述求心治具和所述夹爪治具从所述求心治具中夹取被求心后的该被夹对象的位置,其中,在校正过程中,该被夹对象为标准件,所述标准件与待检测潜望式摄像模组具有相同的形状和尺寸参数,且所述标准件在其一侧端部设有反射单元;通过所述准直仪和被所述夹爪治具所夹持的所述标准件,调整所述夹爪治具的位姿,并记录所述夹爪治具的第二夹放点位,所述第二夹放点位用于表示所述夹爪治具将该被夹对象放置于夹具的位置;基于所述准直仪,调整所述标板相对于所述增距单元的位置关系;以及,调整所述夹具相对于所述夹爪治具的位置关系,并记录所述夹具的预定位位置,所述预定位位置用于表示接收来自所述夹爪治具的该被夹对象的位置。
47.在介绍了本技术的基本原理之后,下面将参考附图来具体介绍本技术功能的各种非限制性实施例。
48.示例性基于准直仪的用于潜望式摄像模组的组装系统的校正方法
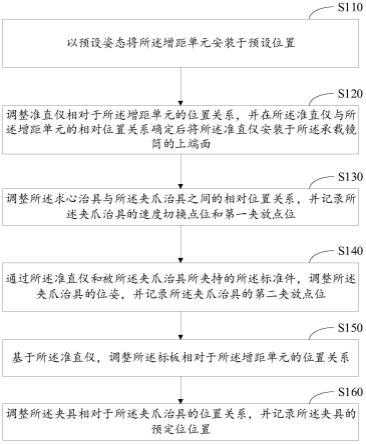
49.图4图示了根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正方法的流程图。如图4所示,根据本技术实施例的基于准直仪的用于潜望式摄像模组的组装系统的校正方法,包括步骤:s110,以预设姿态将所述增距单元安装于预设位置;s120,调整准直仪相对于所述增距单元的位置关系,并在所述准直仪与所述增距单元的相对位置关系确定后将所述准直仪安装于所述承载镜筒的上端面;s130,调整所述求心治具与所述夹爪治具之间的相对位置关系,并记录所述夹爪治具的速度切换点位和第一夹放点位,其中,所述速度切换点位用于表示所述夹爪治具在靠近或远离所述求心治具的过程中速度被切换的位置;所述夹放点位用于表示所述夹爪治具放置被夹对象于所述求心治具和所述夹爪治具从所述求心治具中夹取被求心后的该被夹对象的位置,其中,在校正过程中,该被夹对象为标准件,所述标准件与待检测潜望式摄像模组具有相同的形状和尺寸参数,且所述标准件在其一侧端部设有反射单元;s140,通过所述准直仪和被所述夹爪治具所夹持的所述标准件,调整所述夹爪治具的位姿,并记录所述夹爪治具的第二夹放点位,所述第二夹放点位用于表示所述夹爪治具将该被夹对象放置于夹具的位置;s150,基于所述准直仪,调整所述标板相对于所述增距单元的位置关系;以及,s160,调整所述夹具相对于所述夹爪治具的位置关系,并记录所述夹具的预定位位置,所述预定位位置用于表示接收来自所述夹爪治具的该被夹对象的位置。
50.在步骤s110中,以预设姿态将所述增距单元20安装于预设位置。也就是,在根据本技术实施例的校正方法中,所述增距单元20具有固定位姿(这里,位姿等于位置加姿态),即,在校正过程中,所述增距单元20的位置和姿态不发生改变。因此,在根据本技术实施例的所述校正方法中,所述增距单元20可作为一相对参考照,来校准其他部件。
51.在具体实施中,如图5所示,可通过机械定位、激光校准等方式将所述增距单元20以预设姿态安装于预设位置。
52.在步骤s120中,调整准直仪相对于所述增距单元的位置关系,并在所述准直仪与所述增距单元的相对位置关系确定后将所述准直仪安装于所述承载镜筒的上端面。
53.如图6所示,在本技术实施例中,所述准直仪70包括包括准直单元71、紧固元件72和承载框架73,所述准直单元71通过所述紧固元件72被固定于所述承载框架73的上端面。具体地,在本技术一个具体的示例中,所述紧固件被实施为螺丝,所述准直单元71通过该螺丝被固定于所述承载框架73的上端面,也就是,在该具体示例中,所述准直单元71通过螺丝被悬持于所述承载框架73内。在该具体示例中,所述承载框架73具有中空结构,所述准直单元71通过该螺丝被悬持地设置于所述承载框架73的中空结构内。
54.相应地,所述准直单元71通过激光来测量被测对象的准直度,其在所述承载框架73内的位置可通过所述紧固元件72来调整,即,该具体示例中,所述准直仪70与其他部件之间的相对位置关系,可通过调整所述紧固元件72实现。
55.更具体地,在步骤s130中,如图6所示,调整准直仪70相对于所述增距单元20的位置关系的过程,包括:首先,在所述增距单元20的所述承载镜筒21的上端面上设置一第一平面反射镜80,其中,所述第一平面反射镜80抵靠于所述上端面。
56.接着,以所述准直仪70测量所述第一平面反射镜80的水平度。具体地,在测量过程中,首先,所述准直仪70的所述准直单元71向所述第一平面反射镜80投射检测激光,该检测激光在抵达所述第一平面反射镜80后被所述第一平面反射镜80反射回所述准直单元71;进而,所述准直单元71能够基于投射出去的检测激光和接收到的检测激光,测量所述第一平面反射镜80的水平度。应可以理解,所述第一平面反射镜80的水平度表示所述增距单元20的所述承载镜筒21的上端面的水平度,即,所述承载镜筒21的水平度。
57.然后,基于所述水平度,调整所述准直仪70相对于所述第一平面反射镜80的位置关系直到所述平面镜的水平度满足预设要求。更明确地,基于所述水平度,调整所述紧固元件72以调整所述准直单元71相对于所述第一平面反射镜80的位置关系。在本技术一个具体示例中,该预设要求为所述准直单元71的读数为xy界面在0.5’以内,也就是,当所述准直单元71的读数为xy界面在0.5’以内时,所述准直仪70与所述增距单元20之间的相对位置关系被确定。
58.相应地,在所述准直仪70与所述增距单元20的相对位置关系确定后,进一步将所述准直仪70安装于所述承载镜筒21的上端面。在一些具体示例中,可将调整完成的所述准直仪70直接安装在所述承载镜筒21的上端面上,而不需要所述第一平面反射镜80。相应地,在这些示例中,在所述准直仪70与所述增距单元20的相对位置关系确定后将所述准直仪70安装于所述承载镜筒21的上端面的过程,包括:首先,移除所述第一平面反射镜80;然后,将所述准直仪70的承载框架73安装于所述承载镜筒21的上端面。
59.在步骤s130中,调整所述求心治具40与所述夹爪治具60之间的相对位置关系,并记录所述夹爪治具60的速度切换点位和第一夹放点位,其中,所述速度切换点位用于表示所述夹爪治具60在靠近或远离所述求心治具40的过程中速度被切换的位置;所述夹放点位用于表示所述夹爪治具60放置被夹对象于所述求心治具40和所述夹爪治具60从所述求心治具40中夹取被求心后的该被夹对象的位置,其中,在校正过程中,该被夹对象为标准件,
所述标准件与待检测潜望式摄像模组具有相同的形状和尺寸参数,且所述标准件在其一侧端部设有反射单元。
60.在本技术一个具体的示例中,如图7所示,调整所述求心治具40与所述夹爪治具60之间的相对位置关系并记录所述夹爪治具60的速度切换点位和第一夹放点位的过程,包括:首先,通过视觉定位系统自动调节所述求心治具40的xyw点位并进行记录,同时,利用所述求心治具40的第一激光检测装置41和所述所述夹爪治具60的第二激光检测装置61,自动地调整所述夹爪治具60的uv轴,并记录所述夹爪治具60的点位。相应地,这些点位中,包括:所述夹爪治具60的速度切换点位和第一夹放点位,所述速度切换点位用于表示所述夹爪治具60在靠近或远离所述求心治具40的过程中速度被切换的位置,其中所述的速度切换为从较高的运行速度切换到较低的运行速度;所述夹放点位用于表示所述夹爪治具60放置被夹对象于所述求心治具40和所述夹爪治具60从所述求心治具40中夹取被求心后的该被夹对象的位置。
61.当然,在本技术其他示例中,还可以通过其他方式对所述求心治具40和所述夹爪治具60进行定位,例如,通过机械卡件进行定位。更具体地,例如,可通过插销的方式对所述求心治具40和所述夹爪治具60进行定位,即,所述夹爪治具60和求心治具40上都设有光滑的插销孔,可通过所述夹爪治具60上的插销孔和所述求心治具40上的插销孔配合插销完成两者之间的定位。
62.在步骤s140中,通过所述准直仪70和被所述夹爪治具60所夹持的所述标准件,调整所述夹爪治具60的位姿,并记录所述夹爪治具60的第二夹放点位,所述第二夹放点位用于表示所述夹爪治具60将该被夹对象放置于夹具50的位置。如在步骤s130中所述,在校正过程中,该被夹对象为标准件90,所述标准件90与待检测潜望式摄像模组具有相同的形状和尺寸参数,且所述标准件90在其一侧端部设有反射单元。在本技术一个具体的示例中,所述标准件90在其侧端部设有通光孔,所述反射元件23被设置于所述通光孔内,所述反射元件23被实施为平面反射镜。
63.具体地,在本技术实施例中,如图8所示,通过所述准直仪70和被所述夹爪治具60所夹持的所述标准件90,调整所述夹爪治具60的位姿,并记录所述夹爪治具60的第二夹放点位的过程,包括:首先,架设所述准直仪70逐渐到所述增距单元20的上方,使得所述准直仪70投射的检测激光能够照射到所述增距单元20;然后手动地调节所述增距单元20的xy维度的位姿,以使得检测激光能够沿着其传播光路穿过所述通光孔并抵至所述反射单元,从而该检测激光能够通过所述反射单元被反射回所述准直仪70,通过这样的方式,使得所述准直仪70能够测量所述反射单元的垂直度;具体地,所述准直仪70所投射的激光在沿着第一方向穿过所述增距单元20的所述增距透镜22后被所述增距单元20的所述反射元件23所转折以沿着第二方向抵达所述标准件90的所述反射单元;接着,基于所述垂直度,调整所述夹爪治具60的位姿直至所述垂直度满足预设要求。
64.在本技术一个具体的示例中,所述预设要求为所述准直仪70的vw界面显示在0.5’以内,此时记录所述位置为所述第二夹放点位。
65.在步骤s150中,基于所述准直仪70,调整所述标板10相对于所述增距单元20的位置关系。在本技术实施例中,如图9所示,基于所述准直仪70,调整所述标板10相对于所述增距单元20的位置关系,包括:首先,在所述标板10的下表面设置一第二平面反射镜81;然后,
以安装于所述增距单元20的所述准直仪70测量所述第二平面反射镜81的水平度;继而,基于所述第二平面反射镜81的水平度,调整所述标板10相对于所述增距单元20的位置关系直到所述水平度满足预设要求。
66.在本技术一个具体示例中,所述预设要求为所述准直仪70的界面中的读数显示在0.5’以内,此时,可大致认为所述标板10和所述增距单元20平行。
67.并且,优选地,在本技术实施例中,所述第二平面反射镜81被安装于所述标板10的下表面的中间区域。相应地,在本技术实施例中,在所述标板10的下表面设置一第二平面反射镜81之前,进一步包括:架设所述准直仪70至所述增距单元20的上方,使得所述准直仪70投射的激光能够照射所述标板10并调整所述标板10的位置使得所述准直仪70投射的光点能够和所述标板10的下表面的中心区域重合,即,对齐于所述第二平面反射镜81。
68.值得一提的是,在本技术实施例中,所述标准件90的制作需要和待组装的潜望式摄像模组的外观标准尺寸一直,不同的生产模组需求需要不同的标准件90参与并完成校正工作。
69.在步骤s160中,调整所述夹具50相对于所述夹爪治具60的位置关系,并记录所述夹具50的预定位位置,所述预定位位置用于表示接收来自所述夹爪治具60的该被夹对象的位置。
70.如图10所示,在本技术一个具体示例中,调整所述夹具50相对于所述夹爪治具60的位置关系,并记录所述夹具50的预定位位置的过程,包括:通过视觉定位系统调整所述夹具50的位姿,以调整所述夹具50相对于所述夹爪治具60的位置关系。具体地,通过视觉定位系统进行所述夹具50在其xyw维度的位姿,同时,以所述夹爪治具60的第二激光检测装置61和所述夹具50的第三激光检测装置51,自动地调整所述夹具50的位姿,并得到所述夹具50的预定位位置。
71.综上,基于本技术实施例的基于准直仪70的用于潜望式摄像模组的组装系统的校正方法被阐明,其以准直仪70并使用特定的校准方案对潜望式摄像模组的组装系统进行校正,以提高潜望式摄像模组的组装系统的组装精度,保证良率。
72.值得一提的是,标定完成后,所有的位置调试完成后需要在对应的位置上做mark标记,在必要的地方也可以通过固定胶材进行固定(如热熔胶等)。
73.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。