1.本技术涉及摄像模组领域,尤其涉及可变焦摄像模组,其中,所述可变焦摄像模组采用压电致动器作为驱动器以提供足够大的驱动力和相对更佳的驱动性能。
背景技术:
2.随着移动电子设备的普及,被用于移动电子设备的用于帮助使用者获取影像(例如,视频或者图像)的摄像模组的相关技术得到了迅猛的发展和进步,并且在近年来,摄像模组在诸如医疗、安防、工业生产等诸多的领域都得到了广泛的应用。
3.为了满足越来越广泛的市场需求,高像素、大芯片、小尺寸是现有摄像模组不可逆转的发展趋势。随着感光芯片朝着高像素和大芯片的方向发展,与感光芯片适配的光学镜头的尺寸也逐渐增大,这给用于驱动光学镜头以进行光学性能调整(例如,光学对焦、光学防抖等)的驱动元件带来的新的挑战。
4.具体地,现有的用于驱动光学镜头的驱动元件为电磁式马达,例如,音圈马达(voice coil motor:vcm)、形状记忆合金驱动器(shape of memory alloy actuator:sma)等。然而,随着光学镜头尺寸增加而导致的重量增加,现有的电磁式马达已逐渐无法提供足够的驱动力来驱动光学镜头移动。量化来看,现有的音圈马达和形状记忆合金驱动器仅适于驱动重量小于100mg的光学镜头,也就是,如果光学镜头的重量超过100mg,现有的驱动器将无法满足摄像模组的应用需求。
5.此外,随着市场需求的变化和发展,近年来还要求配置于终端设备的摄像模组能够实现变焦拍摄的功能,例如,通过光学变焦来实现远景拍摄的需求。相较于传统的摄像模组(例如,动焦摄像模组),光学变焦摄像模组不仅包括具有更大尺寸和重量的镜头,也就是,要求驱动器提供更大的驱动力,而且,还要求用于驱动镜头移动的驱动器能够提供精度更高和行程更长的驱动性能。上述技术要求,现有的电磁式驱动马达已无法满足。同时,现有的电磁式致动器还存在电磁干扰的问题。
6.因此,需要一种适配的用于摄像模组的新型驱动方案,且,新型的驱动器能够满足摄像模组轻型化和薄型化的发展需求。
技术实现要素:
7.本技术的一优势在于提供了一种可变焦摄像模组,其中,所述可变焦摄像模组采用压电致动器作为驱动器以不仅能够提供足够大的驱动力,而且,能够提供精度更高和行程更长的驱动性能,以满足所述可变焦摄像模组的光学性能调整需求。
8.本技术的又一优势在于提供了一种可变焦摄像模组,其中,采用合理的布设方案将所述压电致动器布设于所述可变焦摄像模组中,以满足使得所述可变焦摄像模组满足其结构和尺寸设计要求。
9.本技术的又一优势在于提供了一种可变焦摄像模组,其中,通过至少一对压电致动器分别从待驱动对象的相对的两侧提供驱动力,以使得该待驱动对象的移动更为平稳。
10.通过下面的描述,本技术的其它优势和特征将会变得显而易见,并可以通过权利要求书中特别指出的手段和组合得到实现。
11.为实现上述至少一优势,本技术提供一种可变焦摄像模组,其包括:
12.设有一光轴的变焦透镜组,包括:固定部分、变焦部分和对焦部分;
13.对应于所述变焦透镜组的感光组件;以及
14.驱动组件,包括:驱动壳体、位于所述驱动壳体内的第一载体、第二载体、第一驱动组件和第二驱动组件,其中,所述变焦部分被安装于所述第一载体内,所述对焦部分被安装于所述第二载体内,所述第一驱动组件被配置为从所述第一载体的相对于所述光轴的第一侧和第二侧同时驱动所述第一载体以带动所述变焦部分沿着所述光轴所设定的方向移动,所述第二驱动组件被配置为驱动所述第二载体以带动所述对焦部分沿着所述光轴所设定的方向移动。
15.在根据本技术的可变焦摄像模组中,所述第一驱动组件包括第一驱动元件和第二驱动元件,所述第一驱动元件和第二驱动元件被实施为压电致动器,其中,所述第一驱动元件被配置为从所述第一载体的第一侧驱动所述第一载体以带动所述变焦部分沿着所述光轴所设定的方向移动,所述第二驱动元件被配置为从所述第一载体的第二侧驱动所述第一载体以带动所述变焦部分沿着所述光轴所设定的方向移动。
16.在根据本技术的可变焦摄像模组中,所述压电致动器包括压电主动部、可传动地连接于所述压电主动部并自所述压电主动部延伸的从动轴以及紧配于所述从动轴的驱动部,其中,所述驱动部在所述压电主动部和所述从动轴的作用下被配置为驱动所述第一载体沿着所述光轴所设定的方向移动。
17.在根据本技术的可变焦摄像模组中,所述第一载体的底表面和所述驱动壳体的底表面之间形成位于所述第一载体的第一侧的第一收容通道和位于所述第一载体的第二侧的第二收容通道,其中,所述第一驱动元件的驱动部被设置于所述第一收容通道内,所述第二驱动元件的驱动部被设置于所述第二收容通道内。
18.在根据本技术的可变焦摄像模组中,所述第一驱动元件的从动轴的至少一部分延伸于所述第一收容通道内,所述第二驱动元件的从动轴的至少一部分延伸于所述第二收容通道内。
19.在根据本技术的可变焦摄像模组中,所述第一载体包括第一载体底座和一体地自所述第一载体底座分别向上延伸的第一延长臂和第二延长臂,以在所述第一载体底座、所述第一延长臂和所述第二延长臂之间形成用于安装所述变焦部分的第一安装腔和连通于所述第一安装腔的第一开口,其中,所述第一收容通道形成于所述第一载体底座的侧表面,所述第一延长臂的底表面和所述驱动壳体的底表面之间,所述第二收容通道形成于所述第一载体底座的侧表面,所述第二延长臂的底表面和所述驱动壳体的底表面之间。
20.在根据本技术的可变焦摄像模组中,所述第一驱动元件的驱动部被安装于所述第一延长臂的底表面,所述第二驱动元件的驱动部被安装于所述第二延长臂的底表面。
21.在根据本技术的可变焦摄像模组中,所述第一驱动元件和所述第二驱动元件被同向地设置。
22.在根据本技术的可变焦摄像模组中,所述第一驱动元件和所述第二驱动元件被异向的设置。
23.在根据本技术的可变焦摄像模组中,所述第一驱动元件和所述第二驱动元件都以第一布置方向布置。
24.在根据本技术的可变焦摄像模组中,所述第一驱动元件和所述第二驱动元件都以第二布置方向布置。
25.在根据本技术的可变焦摄像模组中,所述第一驱动元件的压电主动部被安装于所述驱动壳体的第一侧壁,所述第二驱动元件的压电主动部被安装于所述驱动壳体的所述第一侧壁。
26.在根据本技术的可变焦摄像模组中,所述驱动壳体包括关于所述光轴对称地设置于其中部的第一安装部和第二安装部,其中,所述第一驱动元件的压电主动部被安装于所述第一安装部的第一侧壁,所述第二驱动元件的压电主动部被安装于所述第二安装部的第一侧壁。
27.在根据本技术的可变焦摄像模组中,所述第一驱动元件的压电主动部与所述第二驱动元件的压电主动部在所述驱动壳体的高度方向上齐平。
28.在根据本技术的可变焦摄像模组中,所述第一驱动元件的从动轴和所述第二驱动元件的从动轴在所述驱动壳体的高度方向上齐平。
29.在根据本技术的可变焦摄像模组中,所述第一驱动元件的从动轴与所述第二驱动元件的从动轴关于所述光轴对称地布置在所述第一载体的第一侧和所述第一载体的第二侧。
30.在根据本技术的可变焦摄像模组中,所述第一驱动元件的驱动部和所述第二驱动元件的驱动部关于所述光轴对称地布置在所述第一载体的第一侧和所述第一载体的第二侧。
31.在根据本技术的可变焦摄像模组中,所述第二驱动组件包括第三驱动元件和第四驱动元件,所述第三驱动元件和第四驱动元件被实施为压电致动器,其中,所述第三驱动元件被配置为从所述第二载体的第一侧驱动所述第二载体以带动所述对焦部分沿着所述光轴所设定的方向移动,所述第四驱动元件被配置为从所述第二载体的第二侧驱动所述第一载体以带动所述对焦部分沿着所述光轴所设定的方向移动。
32.在根据本技术的可变焦摄像模组中,所述第二驱动组件包括第三驱动元件和第四驱动元件,所述第三驱动元件和第四驱动元件被实施为压电致动器,其中,所述第三驱动元件被配置为从所述第二载体的第一侧驱动所述第二载体以带动所述对焦部分沿着所述光轴所设定的方向移动,所述第四驱动元件被配置为从所述第二载体的第二侧驱动所述第一载体以带动所述对焦部分沿着所述光轴所设定的方向移动。
33.在根据本技术的可变焦摄像模组中,所述第二驱动组件包括第三驱动元件和第四驱动元件,所述第三驱动元件和第四驱动元件被实施为压电致动器,其中,所述第三驱动元件被配置为从所述第二载体的第一侧驱动所述第二载体以带动所述对焦部分沿着所述光轴所设定的方向移动,所述第四驱动元件被配置为从所述第二载体的第二侧驱动所述第一载体以带动所述对焦部分沿着所述光轴所设定的方向移动。
34.在根据本技术的可变焦摄像模组中,所述第二载体的底表面和所述驱动壳体的底表面之间形成位于所述第二载体的第一侧的第三收容通道和位于所述第二载体的第二侧的第四收容通道,其中,所述第三驱动元件的驱动部被设置于所述第三收容通道内,所述第
四驱动元件的驱动部被设置于所述第四收容通道内。
35.在根据本技术的可变焦摄像模组中,所述第三驱动元件的从动轴的至少一部分延伸于所述第三收容通道内,所述第四驱动元件的从动轴的至少一部分延伸于所述第四收容通道内。
36.在根据本技术的可变焦摄像模组中,所述第二载体包括第二载体底座和一体地自所述第二载体底座分别向上延伸的第三延长臂和第四延长臂,以在所述第二载体底座、所述第三延长臂和所述第四延长臂之间形成用于安装所述对焦部分的第二安装腔和连通于所述第二安装腔的第二开口,其中,所述第三收容通道形成于所述第二载体底座的侧表面,所述第三延长臂的底表面和所述驱动壳体的底表面之间,所述第四收容通道形成于所述第二载体底座的侧表面,所述第四延长臂的底表面和所述驱动壳体的底表面之间。
37.在根据本技术的可变焦摄像模组中,所述第三驱动元件和所述第四驱动元件被同向地设置。
38.在根据本技术的可变焦摄像模组中,所述第三驱动元件和所述第四驱动元件都以第一布置方向布置。
39.在根据本技术的可变焦摄像模组中,所述第三驱动元件和所述第四驱动元件被同时以第二布置方向布置。
40.在根据本技术的可变焦摄像模组中,所述第三驱动元件的压电主动部被安装于所述驱动壳体的相对于所述第一侧壁的第二侧壁,所述第四驱动元件的压电主动部被安装于所述驱动壳体的所述第二侧壁。
41.在根据本技术的可变焦摄像模组中,所述第三驱动元件的压电主动部被安装于所述第一安装部的相对于所述第一侧壁的第二侧壁,所述第四驱动元件的压电主动部被安装于所述第二安装部的相对于所述第一侧壁的第二侧壁。
42.在根据本技术的可变焦摄像模组中,所述第三驱动元件的从动轴和所述第四驱动元件的从动轴在所述驱动壳体的高度方向上齐平。
43.在根据本技术的所述可变焦摄像模组中,所述第三驱动元件的从动轴与所述第四驱动元件的从动轴关于所述光轴对称地布置在所述第二载体的第一侧和所述第二载体的第二侧。
44.在根据本技术的所述可变焦摄像模组中,所述第三驱动元件的驱动部和所述第四驱动元件的驱动部关于所述光轴对称地布置在所述第一载体的第一侧和所述第一载体的第二侧。
45.在根据本技术的可变焦摄像模组中,所述第一收容通道对应于所述第三收容通道,和/或,所述第二收容通道对齐于所述第四收容通道。
46.在根据本技术的可变焦摄像模组中,所述第三驱动元件和所述第四驱动元件的从动轴在所述驱动壳体的高度方向上与所述第一驱动元件和所述第二驱动元件的从动轴相齐平。
47.在根据本技术的可变焦摄像模组中,所述第一驱动元件的从动轴在所述驱动壳体的宽度方向上与所述第三驱动元件的从动轴相对齐,和/或,所述第二驱动元件的从动轴在所述驱动壳体的宽度方向上与所述第四驱动元件的从动轴相对齐。
48.在根据本技术的可变焦摄像模组中,所述可变焦摄像模组进一步包括:用于将成
像光线转折至所述变焦透镜组的光转折元件。
49.在根据本技术的可变焦摄像模组中,所述可变焦摄像模组,进一步包括:用于驱动所述光转折元件的第五驱动元件。
50.在根据本技术的可变焦摄像模组中,所述变焦部分和所述对焦部分相邻地设置。
51.在根据本技术的可变焦摄像模组中,所述变焦部分位于所述固定部分和所述对焦部分之间。
52.在根据本技术的可变焦摄像模组中,所述对焦部分位于所述固定部分和所述变焦部分之间。
53.通过对随后的描述和附图的理解,本技术进一步的目的和优势将得以充分体现。
54.本技术的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
55.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
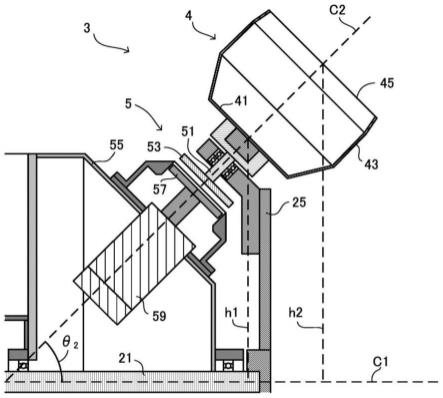
56.图1图示了根据本技术实施例的可变焦摄像模组的示意图。
57.图2图示了根据本技术实施例的所述可变焦摄像模组的另一示意图。
58.图3图示了根据本技术实施例的所述可变焦摄像模组的光学系统的示意图。
59.图4图示了根据本技术实施例的所述可变焦摄像模组的光阻挡元件的一个具体示例的示意图。
60.图5a和图5b图示了根据本技术实施例的所述可变焦摄像模组的压电致动器的示意图。
61.图6a和图6b图示了根据本技术实施例的所述可变焦摄像模组的压电致动器的一个变形实施的示意图.
62.图7图示了根据本技术实施例的所述可变焦摄像模组的一个变形实施的示意图。
63.图8图示了根据本技术实施例的所述可变焦摄像模组的另一个变形实施的示意图。
64.图9图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。
65.图10图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。
66.图11图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。
67.图12图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。
68.图13图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。
具体实施方式
69.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
70.申请概述
71.如上所述,现有的用于驱动摄像模组中的各个组件,比如光学镜头和变焦组件的驱动元件为电磁式马达,例如,音圈马达(voice coil motor:vcm)、形状记忆合金驱动器(shape of memory alloy actuator:sma)等。由于传统上,摄像模组沿着电子设备,比如手机的厚度方向设置,因此摄像模组中的各个组件以轻薄和小型化为趋势,在这种情况下,电磁式马达可以提供足够的驱动力。但是,随着潜望式摄像模组等新型的摄像模组改变了摄像模组相对于电子设备的结构和位置关系,也就是,可以沿着电子设备的长度或者宽度方向设置,使得摄像模组不再受到电子设备的厚度方向的尺寸限制,从而可以在尺寸增加方面获得更大的自由度。
72.并且,随着对于摄像模组的成像性能的要求提高,对于摄像模组的各个组件,尤其是变焦组件提出了更高的要求,伴随着尺寸增加方面的限制减小,为了实现更强的功能,摄像模组的组件设计也带来了组件尺寸的增大,从而导致组件的重量也进一步增大。在这种情况下,传统的电磁式马达不再能够提供足够的驱动力,量化来看,现有的音圈马达驱动器仅能够驱动重量小于100mg的光学镜头,而记忆合金马达则需要较大的行程空间设置,也就是,如果摄像模组中的待驱动的组件的重量超过100mg,现有的驱动器将无法满足摄像模组的应用需求或者需要增加非常多的驱动器尺寸,以提供较大推力,因此必须为摄像模组开发新一代的驱动方案。
73.基于此,本技术的技术路线是提供一种基于能够提供更大驱动力的压电致动器的可变焦摄像模组的设计,从而满足新型的可变焦摄像模组中的组件大型化之后对组件驱动力的需求。
74.这里,本领域技术人员可以理解的是,由于新型的可变焦摄像模组的技术要求与传统的需要实现小型化的可变焦摄像模组的技术要求完全相反,因此在针对新型的可变焦摄像模组的技术路线中,需要一整套基于新型的可变焦摄像模组的技术要求的设计方案,而不仅是简单地将新型的致动元件应用于传统的可变焦摄像模组的设计当中。
75.具体地,本技术的技术方案提供了一种可变焦摄像模组,包括:变焦透镜组,包括:固定部分、变焦部分和对焦部分,其中,所述变焦透镜组设有一光轴;对应于所述变焦透镜组的感光组件;以及,驱动组件,包括:驱动壳体、位于所述驱动壳体内的至少一个驱动元件,其中,所述至少一个驱动元件被设置于所述变焦透镜组的第一侧,被配置为驱动所述变焦部分和/或所述对焦部分沿着该光轴移动,且所述至少一个驱动元件为压电致动器。
76.这样,通过以能够提供更大驱动力的压电致动器为基础的可变焦摄像模组的整体结构配置,将压电致动器作为需要移动的变焦部分和/或对焦部分的驱动元件,可以驱动重量更大的可变焦摄像模组的光学组件,也就是,重量远大于100毫克,例如直到重量超过1克的光学组件。并且,即使压电致动器单次形变所提供的行程有限,也可以通过叠加多次形变提供的行程的方式,来实现待移动的光学组件的较长距离的移动,且压电致动器单次形变加上恢复的时间很短,完全可以满足变焦时间上的需要。
77.值得注意的是,以下以根据本技术实施例的可变焦摄像模组被实施为可变焦潜望式摄像模组,来说明所述可变焦摄像模组。当然,本领域普通技术人员应可以理解,虽然在本技术实施例中,以所述可变焦摄像模组被实施为可变焦潜望式摄像模组为示例,但是,在本技术其他示例中,所述可变焦摄像模组也可以被实施为其他类型的摄像模组,对此,并不为本技术所局限。
78.并且,本领域技术人员可以理解的是,虽然在本技术实施例中,以压电致动器为例进行了说明,根据本技术实施例的可变焦摄像模组的技术方案也可以等效地应用于压电致动器以外的其它可以提供更大驱动力的致动器,本技术并不意在对此进行任何限制。
79.示例性可变焦摄像模组
80.图1图示了根据本技术实施例的可变焦摄像模组的示意图。如图1所示,根据本技术实施例的所述可变焦摄像模组,包括:光转折元件10、变焦透镜组20、感光组件30和驱动组件40。
81.相应地,如图1至图3所示,在本技术实施例中,所述光转折元件10,用于接收来自被摄目标的成像光线,并将该成像光线转折至所述变焦透镜组20。特别地,在本技术实施例中,所述光转折元件10被配置为将来自被摄目标的成像光线进行90
°
的转折,以使得所述可变焦摄像模组的整体高度尺寸可得以缩减。这里,考虑到制造公差,在实际工作过程中,所述光转折元件10对成像光线进行转折的角度可能存在1
°
以内的误差,对此,本领域普通技术人员应可以理解。
82.在本技术的具体示例中,所述光转折元件10可被实施为反射镜(例如,平面反射镜),或者,光转折棱镜(例如,三棱镜)。例如,当所述光转折元件10被实施为光转折棱镜时,所述光转折棱镜的光入射面与其光出射面相互垂直且所述光转折棱镜的光反射面与所述光入射面和所述光出射面成45
°
角倾斜,这样,当成像光线以垂直于所述光入射面的方式进入所述光转折棱镜后,该成像光线能够在所述光反射面处发生90
°
转折,以垂直于所述光出射面的方式从所述光出射面输出。
83.当然,在本技术其他示例中,所述光转折元件10还可以被实施为其他类型的光学元件,对此,并不为本技术所局限。并且,在本技术实施例中,所述可变焦摄像模组还可以包括更多数量的光转折元件10,其一个原因在于:引入所述光转折元件10的一个作用为:对成像光线进行转折,以对具有较长光学总长(ttl:total track length)的所述可变焦摄像模组的光学系统能够进行结构维度上的折叠。相应地,当所述可变焦摄像模组的光学总长(ttl)过长时,可设置更多数量的光转折元件10,以满足所述可变焦摄像模组的尺寸要求,例如可以设置所述光转折元件10于所述可变焦摄像模组的像侧或者其中两个光学透镜之间。
84.如图1至图3所示,在本技术实施例中,所述变焦透镜组20对应于所述光转折元件10,用于接收来自所述光转折元件10的成像光线以该成像光线进行汇聚。相应地,如图1和图3所示,所述变焦透镜组20沿着其所设定的光轴方向,包括:固定部分21、变焦部分22和对焦部分23,其中,所述固定部分21具有预定的安装位置,所述变焦部分22和所述对焦部分23能够在所述驱动组件40的作用下相对于所述固定部分21的位置分别进行调整,从而实现所述可变焦摄像模组的光学性能的调整,包括但不限于光学对焦和光学变焦功能。例如,可通过所述驱动组件40调整所述变焦部分22和所述对焦部分23,以使得所述可变焦摄像模组的
变焦透镜组20的焦距被调整,从而能够清楚地拍摄不同距离的被摄对象。
85.在本技术实施例中,所述固定部分21包括第一镜筒和被容置于所述第一镜筒内的至少一光学透镜。并且,所述固定部分21适于被固定于所述驱动组件40中非移动部分,以使得所述固定部分21在所述变焦透镜组20中位置保持恒定。
86.值得一提的是,在本技术其他示例中,所述固定部分21也可以不设有所述第一镜筒,其仅包括至少一光学透镜,例如,其仅包括相互嵌合的多片光学透镜。也就是,在申请其他示例中,所述固定部分21可被实施为“裸镜头”。
87.所述变焦部分22包括第二镜筒和被容置于所述第二镜筒内的至少一光学透镜,其中,所述变焦部分22适于被所述驱动组件40所驱动以沿着所述变焦透镜组20所设定的光轴方向上进行移动,从而实现所述可变焦摄像模组的光学变焦功能,以使得所述可变焦摄像模组能够实现对不同距离的被摄目标的清晰拍摄。
88.值得一提的是,在本技术其他示例中,所述变焦部分22也可以不设有所述第二镜筒,其仅包括至少一光学透镜,例如,其仅包括相互嵌合的多片光学透镜。也就是,在申请其他示例中,所述变焦部分22也可被实施为“裸镜头”。
89.所述对焦部分23包括第三镜筒和被容置于所述第三镜筒内的至少一光学透镜,其中,所述对焦部分23适于被所述驱动组件40所驱动以沿着所述变焦透镜组20所设定的光轴方向上进行移动,从而实现所述可变焦摄像模组的对焦功能。更明确地,通过驱动所述对焦部分23所实现的光学对焦能够补偿因移动所述变焦部分22而导致的焦点偏移,从而补偿所述可变焦摄像模组的成像性能,使得其成像质量满足预设要求。
90.值得一提的是,在本技术其他示例中,所述对焦部分23也可以不设有所述第三镜筒,其仅包括至少一光学透镜,例如,其仅包括相互嵌合的多片光学透镜。也就是,在申请其他示例中,所述对焦部分23也可被实施为“裸镜头”。
91.更具体地,如图1和图3所示,在本技术实施例中,所述变焦透镜组20的固定部分21、所述变焦部分22和所述对焦部分23被依次地设置(也就是,在所述变焦透镜组20中,所述变焦部分22位于所述固定部分21和所述对焦部分23之间),即,来自所述光转折元件10的成像光线在穿过所述变焦透镜组20的过程中,其将首先透过所述固定部分21、再透过所述变焦部分22,然后,再穿过所述对焦部分23。
92.当然,在本技术的其他示例中,也可以调整所述固定部分21、所述变焦部分22和所述对焦部分23之间的相对位置关系,例如,将所述固定部分21设置于所述变焦部分22和所述对焦部分23之间,再如,将所述对焦部分23设置于所述变焦部分22和所述固定部分21之间。应可以理解,在本技术实施例中,所述固定部分21、所述变焦部分22和所述对焦部分23之间的相对位置关系可根据所述可变焦摄像模组的光学设计要求和结构设计要求进行调整。
93.但特别地,在本技术实施例中,考虑到所述可变焦摄像模组的结构设计(更明确地,为了利于所述驱动组件40的布设),优选地,所述对焦部分23和所述变焦部分22相邻地设置。也就是,根据本技术实施例的所述变焦透镜组20中各个部分的位置,优选地被配置为:所述变焦部分22位于所述固定部分21和所述对焦部分23之间,或者,所述对焦部分23位于所述固定部分21和所述变焦部分22之间。应可以理解,所述变焦部分22和所述对焦部分23是所述变焦透镜组20中需要移动的部分,因此,将所述对焦部分23和所述变焦部分22相
邻地设置有利于布置所述驱动组件40,关于此部分将在所述驱动组件40的具体描述中展开。
94.还值得一提的是,在如图1和图3所示意的示例中,虽然以所述变焦透镜组20,包括一个所述固定部分21、一个所述变焦部分22和一个所述对焦部分23为示例,但是,本领域普通技术人员应知晓,在本技术其他示例中,所述固定部分21、所述变焦部分22和所述对焦部分23的具体数量选择,并不为本技术所局限,其可根据所述可变焦摄像模组的光学设计要求进行调整。
95.为了对进入所述感光组件30的成像光线进行限制,在本技术一些示例中,所述可变焦摄像模组,进一步包括设置于所述感光组件30的感光路径上的光阻挡元件50,其中,所述光阻挡元件50能够至少部分地阻挡成像光线投射,以尽可能地减少杂散光对所述可变焦摄像模组的成像质量的影响。
96.图4图示了根据本技术实施例的所述可变焦摄像模组的光阻挡元件的一个具体示例的示意图。如图4所示,在该具体示例中,所述光阻挡元件50被安装于所述光转折元件10的出光面,其中,所述光阻挡元件50具有透光孔500,其适于使成像光线中的有效部分透过所述透光孔500并阻挡至少部分成像光线中的杂散光。优选地,所述透光孔500为圆形孔,以配合所述变焦透镜组20的圆形有效光学区,尽可能地减少杂散光对成像质量的影响。
97.值得一提的是,在本技术其他示例中,所述光阻挡元件50可被设置于所述光转折元件10的其他位置,例如,所述光转折元件10的光入射面或者光反射面,对此,并不为本技术所局限。还值得一提的是,在本技术其他示例中,所述光阻挡元件50也可以作为一个独立的部件被设置于所述感光组件30的感光路径上,例如,作为一个独立的部件被设置于所述光转折元件10和所述变焦透镜组20之间,再如,作为一个独立的部分被设置于所述变焦透镜组20和所述感光组件30之间,对此,并不为本技术所局限。
98.如图1至图3所示,在本技术实施例中,所述感光组件30对应于所述变焦透镜组20,用于接收来自所述变焦透镜组20的成像光线并进行成像,其中,所述感光组件30包括线路板31、电连接于所述线路板31的感光芯片32和被保持于所述感光芯片32的感光路径上的滤光元件33。更具体地,在如图1至图3所示意的示例中,所述感光组件30,进一步包括设置于所述线路板31的支架34,其中,所述滤光元件33被安装于所述支架34上以被保持于所述感光芯片32的感光路径上。
99.值得一提的是,在本技术其他示例中,所述滤光元件33被保持于所述感光芯片32的感光路径上的具体实施方式并不为本技术所局限,例如,所述滤光元件33可被实施为滤波膜并涂覆于所述变焦透镜组20的某一光学透镜的表面,以起到滤光的效果,再如,所述感光组件30可进一步包括安装于所述支架34的滤光元件支架(未有图示意),其中,所述滤光元件33以被安装于所述滤光元件支架的方式被保持于所述感光芯片32的感光路径上。
100.如前所述,为了满足越来越广泛的市场需求,高像素、大芯片、小尺寸是现有摄像模组不可逆转的发展趋势。随着所述感光芯片32朝着高像素和大芯片的方向发展,与所述感光芯片32适配的所述变焦透镜组20的尺寸也逐渐增大,这给用于驱动所述变焦透镜组20的所述对焦部分23和所述变焦部分22的驱动器提出了新的技术要求。
101.新的技术要求主要集中于两个方面:相对更大的驱动力,以及,更优的驱动性能(具体地包括:更高精度的驱动控制和更长的驱动行程)。并且,除了需要寻找满足新技术要
求的驱动器以外,在选择新驱动器时还需要考虑所选择的驱动器能够适应于当下摄像模组轻型化和薄型化的发展趋势。
102.经研究和试验,本技术发明人发现选择采用压电致动器能够满足所述可变焦摄像模组对于驱动器的技术要求。
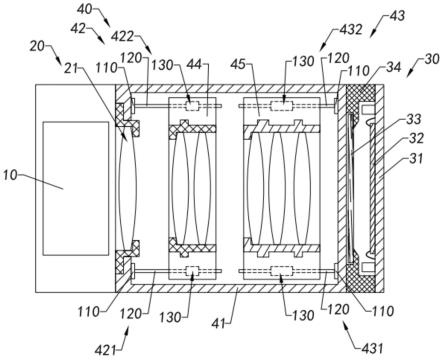
103.具体地,如图1和图2所示,在本技术实施例中,用于驱动所述变焦透镜组20的所述驱动组件40,包括:驱动壳体41、位于所述驱动壳体41内的第一载体44、第二载体45、第一驱动组件42和第二驱动组件43,其中,所述变焦部分22被安装于所述第一载体44内,所述对焦部分23被安装于所述第二载体45内,所述第一驱动组件42被配置为驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动,所述第二驱动组件43被配置为驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动。
104.特别地,在本技术实施例中,所述第一驱动组件42被配置为从所述第一载体44的相对于所述光轴的第一侧和第二侧同时驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动,和/或,所述第二驱动组件43被配置为从所述第二载体45的相对于所述光轴的第一侧和第二侧同时驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动。
105.具体地,在本技术实施例中,当所述第一驱动组件42被配置为从所述第一载体44的相对于所述光轴的第一侧和第二侧同时驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动时,所述第一驱动组件42包括至少一对驱动元件,以通过所述至少一对驱动元件从所述第一载体44的相对于所述光轴的第一侧和第二侧同时驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动。特别地,在本技术实施例中,所述驱动元件被实施为压电致动器。
106.具体地,在本技术实施例中,当所述第二驱动组件43被配置为从所述第二载体45的相对于所述光轴的第一侧和第二侧同时驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动,所述第二驱动组件43包括至少一对被实施为压电致动器的驱动元件,以通过所述至少一对压电致动器从所述第二载体45的相对于所述光轴的第一侧和第二侧同时驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动。
107.在如图1和图2所示意的示例中,所述第一驱动组件42被配置为从所述第一载体44的相对于所述光轴的第一侧和第二侧同时驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动,同时,所述第二驱动组件43被配置为从所述第二载体45的相对于所述光轴的第一侧和第二侧同时驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动。并且,所述第一驱动组件42包括一对被实施为压电致动器的驱动元件,所述第二驱动组件43包括一对被实施为压电致动器的驱动元件。
108.应可以理解,在本技术其他示例中,所述第一驱动组件42和所述第二驱动组件43也可以被配置为:所述第一驱动组件42和所述第二驱动组件43中其中一个驱动组件40被配置为提供一对驱动力来驱动其所对应的载体,而另一个驱动组件40则提供一个驱动力来驱动其所对应的载体,对此,并不为本技术所局限。
109.为了便于描述和说明,将所述第一驱动组件42所包括的一对驱动元件定义为第一驱动元件421和第二驱动元件422,其中,所述第一驱动元件421被配置为从所述第一载体44
的第一侧驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动,所述第二驱动元件422被配置为从所述第一载体44的第二侧驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动。
110.同时,将所述第二驱动组件43所包括的一对驱动元件定义为第三驱动元件431和第四驱动元件432,其中,所述第三驱动元件431被配置为从所述第二载体45的第一侧驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动,所述第四驱动元件432被配置为从所述第二载体45的第二侧驱动所述第一载体44以带动所述对焦部分23沿着所述光轴所设定的方向移动。
111.相应地,在本技术实施例中,所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432被实施为压电致动器100。在本技术实施例中,所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432可以被实施为同一种类型的压电驱动器,或者,被实施为至少两种类型的压电驱动器,对此,本技术不作局限。
112.图5a和图5b图示了根据本技术实施例的所述可变焦摄像模组的所述压电致动器的示意图。如图5a和图5b所示,所述压电致动器100,包括:压电主动部110、可传动地连接于所述压电主动部110的从动轴120,以及,与所述从动轴120紧配的驱动部130,其中,所述驱动部130在所述压电主动部110和所述从动轴120的作用下被配置为驱动第一载体44或所述第二载体45,以带动所述变焦部分22或所述对焦部分23沿着该光轴移动。
113.在如图5a和图5b所示意的示例中,所述压电主动部110包括电极板111和叠置于所述电极板111的至少一压电基板。所述压电基板是具有逆压电效应并且根据极化方向和电场方向收缩或膨胀的基板,例如,其可以通过在单晶或者多晶陶瓷、聚合物等在厚度方向上使用基板极化来制成并使用。这里,逆压电效应是指在电介质的极化方向施加电场,电介质在产生电势差时会发生机械变形。
114.更具体地,在如图5a和图5b所示意的示例中,所述至少一压电基板,包括第一压电基板112和第二压电基板113,所述电极板111被夹设于所述第一压电基板112和所述第二压电基板113之间。并且,在该示例中,所述压电主动部110进一步包括分别形成于所述第一压电基板112的上表面和下表面的电极层115,以及,分别形成于所述第二压电基板113的上表面和下表面的电极层115,以通过所述电极层115和所述电极板111为所述第一压电基板112和所述第二压电基板113提供脉冲电压。
115.在该示例中,所述电极板111可以由带有一定弹性的板状元件构成,例如,带有一定弹性的金属板构成。在如图5a和图5b所示意的示例中,所述压电主动部110,进一步包括与所述电极板111电连接的至少一电导通部位114,例如,所述至少一电导通部位114可通过焊接的方式焊接于所述电极板111,或者是所述至少一电导通部位114与所述电极板111一体形成。值得一提的是,当所述电导通部位114的数量为多个时,优选地,所述多个电导通部位114对称地分布于所述电极板111的外表面。
116.在该示例中,所述第一压电基板112和所述第二压电基板113分别通过所述电极层115被附着于所述电极板111的第一侧表面和与所述第一侧表面相对的第二侧表面。例如,在该示例中,所述第一压电基板112和所述第二压电基板113可以与所述电极板111以相互面与面啮合的方式固定,或者,所述第一压电基板112和所述第二压电基板113通过导电银
胶被附着于所述电极板111。
117.优选地,在该示例中,所述第一压电基板112和所述第二压电基板113的形状的大小与所述电极板111相近或者相一致,从而使得所述压电主动部110具有更优的振动效率。在该具体示例中,所述第一压电基板112、所述第二压电基板113和所述电极板111为圆形板。
118.在如图5a和图5b所示意的示例中,所述从动轴120被固定于所述压电主动部110,例如,通过黏着剂附着于所述压电主动部110的中心。具体地,所述从动轴120可通过黏着剂被附着于所述第一压电基板112的外表面的电极层115上,或者,通过黏着剂被嵌套地附着于所述第一压电基板112的外表面的电极层115的中心孔内,或者,所述第一压电基板112具有一中心孔,所述从动轴120进一步被嵌合于所述第一压电基板112的中心孔内,或者,所述压电主动部110具有贯穿于其上下表面的中心孔,所述从动轴120通过黏着剂被被嵌合于所述压电主动部110的中心孔内。在具体实施中,所述从动轴120可被实施为碳棒。所述从动轴120的截面形状为圆形或者多边形,优选为圆形。
119.在如图5a和图5b所示意的示例中,所述驱动部130与所述从动轴120通过摩擦配合,以使得所述驱动部130可活动地紧配于所述从动轴120上。在具体实施中,所述驱动部130可被实施为夹持所述从动轴120的夹持机构,其中,优选地,所述夹持机构可以是夹持力可调整的夹持机构,或者,部分或全部由弹性材料制成的夹持机构。
120.如图5所示,在所述压电主动部110的表面暴露的所述电极层115电连接于电源控制部位116的正电极117,所述电极板111通过所述电导通部位114被电连接于所述电源控制部位116的负电极118,这样,当所述电源控制部位116给所述电极层115和所述电极板111反复施加脉冲电压时,所述第一压电基板112和所述第二压电基板113在逆压电效应的作用下朝着一个方向变形,并在所述电极板111的弹性作用下快速恢复为平板状。在上述形变过程中,所述从动轴120在其所设定的轴方向上往返移动,而由于所述驱动部130与所述从动轴120之间为摩擦配合,因此,当所述压电主动部110向着一个方向变形时,所述驱动部130和所述从动轴120共同移动,而当所述压电主动部110快速地恢复为原状时,所述从动轴120也逆向移动而所述驱动部130则由于惯性作用无法跟随所述从动轴120的动作而未能返回原来的位置,只能停留在所在的位置。因此,在一个形变过程中,所述驱动部130的位置发生改变,相应地,通过反复施加脉冲电压,可重复上述移动,从而使得所述驱动部130被移动至目标位置。
121.图6a图示了根据本技术实施例的所述压电致动器100的另一个实施例的示意图之一。图6b图示了根据本技术实施例的所述压电致动器100的另一个实施例的示意图之二。如图6a和6b所示,在该示例中,所述压电致动器100包括:压电主动部110、可传动地连接于所述压电主动部110的从动轴120,以及,与所述从动轴120紧配的驱动部130,其中,所述驱动部130在所述压电主动部110和所述从动轴120的作用下被配置为驱动第一载体44或所述第二载体45,以带动所述变焦部分22或所述对焦部分23沿着该光轴移动。
122.如图6a和6b所示,在该示例中,所述压电主动部110包括压电元件111a,所述压电元件111a具有如图6a中所示意的层叠结构。具体地,如图6a所示,所述压电元件111a包括多个压电伸缩件112a和多个电极113a,所述多个压电伸缩件112a和所述多个电极113a之间交替层叠设置。特别地,通过如上所述的层叠结构,所述压电元件111a即便在施加了很小的电
场的情况下,也可获得相对较大的形变量。
123.在该示例中,为了便于说明,将交替地夹着多个压电伸缩件112a而成的电极113a定义为内部电极,而将配设于所述压电伸缩件112a的表面且位于所述压电元件111a的上表面和下表面的电极113a分别定义为上电极和下电极,同时,将配设于所述压电伸缩件112a的表面且位于所述压电元件111a的侧表面的电极113a定义为侧电极。相应地,在多层的情况下,相同极性的电极113a通过所述侧电极进行电连接。
124.如图6b所示,在该示例中,所述从动轴120具有圆柱形状并通过黏着剂附着于所述压电元件111a的上表面的中间区域,以使得所述从动轴120接合于所述压电元件111a。当然,在本技术其他示例中,所述从动轴120的形状也可以做出调整,对此,并不为本技术所局限。
125.并且,所述从动轴120由以“碳、重金属、重金属的碳化物、重金属的硼化物以及重金属的氮化物”中的任一为主要成分的材料制成,所述压电元件111a具有长方体形状,其具有分别沿着相互正交的x轴、y轴以及z轴的边。在该示例中,所述压电元件111a的x轴方向长度为1mm,所述压电元件111a的y轴方向长度为1mm,所述压电元件111a的z轴方向长度(高度)为2mm。
126.值得一提的是,相较于传统的电磁式驱动器,图6a和图6b所示意的所述压电致动器100具有体积小、推力大,精度高的优势。并且,相较于图4和图5所示意的压电致动器100,图6a和图6b所示意的所述压电致动器100的所述压电主动部110具有相对更小的截面尺寸,适于在空间紧凑的模组中使用,但是其厚度尺寸相对较达,同时,所述压电元件111a的内部结构相对较为复杂。
127.相应地,根据本技术实施例的所述压电致动器100能够提供相对较高的驱动力。更明确地,本技术所选择的所述压电致动器100能够提供的驱动力大小为0.6n至2n,其足以驱动重量大于100mg的部件。
128.并且,除了能够提供相对较大的驱动力以外,相较于传统的电磁式马达方案和记忆合金马达方案,所述压电致动器100还具有其他优势,包括但不限于:尺寸相对较小(具有细长状),响应精度更佳,结构相对更为简单,驱动控制相对更为简单,产品一致性高,没有电磁干扰,具有相对更大的行程,稳定时间短,重量相对较小等。
129.具体来说,所述可变焦摄像模组需要其所配置的驱动器具有驱动行程较长且需要保证较好的对准精度等特征。在现有的音圈马达方案中,为了保证运动线性度需要额外设计导杆或滚珠导轨,同时需要在镜头侧部适配大尺寸的驱动磁铁/线圈等,同时需要设置滚珠、弹片、悬丝等辅助定位装置,为容纳较多的部件、保障结构强度和预留结构间隙,往往导致模组横向尺寸偏大,且结构设计复杂,模组重量较重。而记忆合金马达方案,受限于记忆合金方案同比例能够提供的行程相对较少,同时存在潜在断线等可靠性风险。
130.而所述压电致动器100具有相对较为简单的结构,组装结构更加简单,另外其压电主动部110、从动轴120和驱动部130等主动元件大小与运动行程大小基本无关,因此在光学变焦类产品中所述压电致动器100可以实现大推力、小尺寸,小重量等优势,同时匹配更大行程或更重器件重量进行设计,设计中的集成度也更高。
131.进一步地,所述压电致动器100利用振动时的摩擦力和惯性,以摩擦接触的方式推动待推动对象(例如,所述对焦部分23或所述变焦部分22)进行微米级运动,其相较于电磁
式方案非接触的方式驱动待推动对象需要依靠电磁力抵消重力,摩擦力的方式,具有更大推力,更大位移和更低功耗的优势,同时控制精度更高,可实现高精度连续变焦。而且在存在多个马达机构时,所述压电致动器100不存在磁铁线圈结构,无磁干扰问题。另外,所述压电致动器100可依靠部件之间的摩擦力自锁,因此可以降低所述可变焦摄像模组在进行光学变焦时的晃动异响。
132.如前所述,在本技术实施例中,所述第一驱动组件42包括第一驱动元件421和第二驱动元件422,所述第一驱动元件421和第二驱动元件422被实施为压电致动器100,其中,所述第一驱动元件421被配置为从所述第一载体44的第一侧驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动,所述第二驱动元件422被配置为从所述第一载体44的第二侧驱动所述第一载体44以带动所述变焦部分22沿着所述光轴所设定的方向移动。同时,所述第二驱动组件43包括第三驱动元件431和第四驱动元件432,所述第三驱动元件431和第四驱动元件432被实施为压电致动器100,其中,所述第三驱动元件431被配置为从所述第二载体45的第一侧驱动所述第二载体45以带动所述对焦部分23沿着所述光轴所设定的方向移动,所述第四驱动元件432被配置为从所述第二载体45的第二侧驱动所述第一载体44以带动所述对焦部分23沿着所述光轴所设定的方向移动。
133.进一步地,需为所述第一驱动元件421、所述第二驱动元件422和所述第三驱动元件431和所述第四驱动元件432选择合理的布置方式,以将其布置于所述可变焦摄像模组内并实现如上所述的驱动模式。特别地,在本技术实施例中,将所述第一驱动元件421、所述第二驱动元件422和所述第三驱动元件431和所述第四驱动元件432布置于所述驱动壳体41内。
134.如图1和图2所示,在本技术实施例中,所述第一载体44和所述第二载体45具有特殊的结构配置,以使得当所述第一载体44和所述第二载体45被安装于所述驱动壳体41后,所述第一载体44的底表面和所述驱动壳体41的底表面之间形成位于所述第一载体44的第一侧的第一收容通道441和位于所述第一载体44的第二侧的第二收容通道442;所述第二载体45的底表面和所述驱动壳体41的底表面之间形成位于所述第二载体45的第一侧的第三收容通道451和位于所述第二载体45的第二侧的第四收容通道452。特别地,在如图1和图2所示意的示例中,所述第一驱动元件421的驱动部130被设置于所述第一收容通道441内,所述第二驱动元件422的驱动部130被设置于所述第二收容通道442内,所述第三驱动元件431的驱动部130被设置于所述第三收容通道451内,所述第四驱动元件432的驱动部130被设置于所述第四收容通道452内。
135.应可以理解,在现有的摄像模组结构布置方案中,所述第一载体44和所述第二载体45与所述驱动壳体41之间的空间通常都是被闲置的,其原因在于:所述第一载体44与所述第二载体45与所述驱动壳体41之间的空间过小,不适于布设其他部件。
136.然而,当所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432被实施为压电致动器100时,根据如上所述的压电致动器100的描述可知,所述压电致动器100整体具有延长状(即,所述从动轴120自所述压电主动部110垂直地向外延伸,以具有细长状),并且,特别地,所述压电致动器100的从动轴120具有细长条柱状结构。相应地,由于所述压电致动器100具有特殊的结构与尺寸配置,因此,如图1和图2所示意的示例中,选择将第一载体44和所述第二载体45与所述驱动壳体41之间的空间利用起
来,用于布置所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432,以使得所述可变焦摄像模组具有更高的空间利用率且具有相对更高的结构紧凑度。
137.更明确地,在如图1和图2所示意的示例中,除了所述第一驱动元件421的驱动部130被安装在所述第一收容通道441内和所述第二驱动元件422的驱动部130被安装于所述第二收容通道442外,所述第一驱动元件421的从动轴120的至少一部分延伸于所述第一收容通道441内,所述第二驱动元件422的从动轴120的至少一部分延伸于所述第二收容通道442内。这样,以更为充分地利用所述第一载体44和所述第二载体45与所述驱动壳体41之间的空间。
138.更具体地,如图1和图2所示,在本技术实施例中,所述第一载体44包括第一载体底座443和一体地自所述第一载体底座443分别向上延伸的第一延长臂444和第二延长臂445,以在所述第一载体底座443、所述第一延长臂444和所述第二延长臂445之间形成用于安装所述变焦部分22的第一安装腔和连通于所述第一安装腔的第一开口,其中,所述变焦部分22适于所述第一开口被安装入所述第一安装腔内。
139.所述第一收容通道441形成于所述第一载体底座443的侧表面,所述第一延长臂444的底表面和所述驱动壳体41的底表面之间,所述第二收容通道442形成于所述第一载体底座443的侧表面,所述第二延长臂445的底表面和所述驱动壳体41的底表面之间。
140.所述第一驱动元件421的所述驱动部130被实施至少部分具有弹性的且相对设置的两夹板,其通过黏着剂附着于所述第一延长臂444的底表面或者一体成型于所述第一延长臂444的底表面。所述第二驱动元件422的所述驱动部130被实施至少部分具有弹性的且相对设置的两夹板,其通过黏着剂附着于所述第二延长臂445的底表面或者一体成型于所述第一延长臂444的底表面。而所述第一驱动元件421和所述第二驱动元件422的从动轴120分别被紧配地夹设于所述两夹板所形成的夹持腔内。值得一提的是,通过这样的驱动位置的配置,利于降低驱动难度和利于提高驱动的平稳性。
141.更具体地,如图1和图2所示,在本技术实施例中,所述第二载体45包括第二载体底座453和一体地自所述第二载体底座453分别向上延伸的第三延长臂454和第四延长臂455,以在所述第二载体底座453、所述第三延长臂454和所述第四延长臂455之间形成用于安装所述对焦部分23的第二安装腔和连通于所述第二安装腔的第二开口,其中,所述对焦部分23适于从所述第二开口被安装入所述第二安装腔内。
142.所述第三收容通道451形成于所述第二载体底座453的侧表面,所述第三延长臂454的底表面和所述驱动壳体41的底表面之间,所述第四收容通道452形成于所述第二载体底座453的侧表面,所述第四延长臂455的底表面和所述驱动壳体41的底表面之间。
143.所述第三驱动元件431的所述驱动部130被实施至少部分具有弹性的且相对设置的两夹板,其通过黏着剂附着于所述第三延长臂454的底表面或者一体成型于所述第三延长臂454的底表面。所述第四驱动元件432的所述驱动部130被实施至少部分具有弹性的且相对设置的两夹板,其通过黏着剂附着于所述第四延长臂455的底表面或者一体成型于所述第四延长臂455的底表面。而所述第三驱动元件431和所述第四驱动元件432的从动轴120分别被紧配地夹设于所述两夹板所形成的夹持腔内。值得一提的是,通过这样的驱动位置的配置,利于降低驱动难度和利于提高驱动的平稳性。
144.特别值得一提的是,在本技术实施例中,所述第一收容通道441、所述第二收容通道442、所述第三收容通道451和所述第四收容通道452低于所述光轴,也就是,当所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432分别被布设于所述第一收容通道441、所述第二收容通道442、所述第三收容通道451和所述第四收容通道452内时,所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432的从动轴120相对于所述驱动壳体41的底表面的高度低于所述光轴相对于所述驱动壳体41的底表面的高度。
145.优选地,在本技术实施例中,所述第一驱动元件421的驱动部130和所述第二驱动元件422的驱动部130关于所述光轴对称地布置在所述第一载体44的第一侧和所述第一载体44的第二侧。更优选地,所述第一驱动元件421的从动轴120与所述第二驱动元件422的从动轴120关于所述光轴对称地布置在所述第一载体44的第一侧和所述第一载体44的第二侧。更优选地,在本技术实施例中,所述第一驱动元件421的从动轴120和所述第二驱动元件422的从动轴120在所述驱动壳体41的高度方向上齐平。这样,所述变焦部分22在被所述第一驱动元件421和所述第二驱动元件422同时驱动时,所述变焦部分22在其第一侧和第二侧的移动更容易同步且更为平稳,以利于保证所述第一载体44相对于所述驱动壳体41的底表面的平整度,从而利于确保所述可变焦摄像模组的成像质量。
146.优选地,在本技术实施例中,所述第三驱动元件431的驱动部130和所述第四驱动元件432的驱动部130关于所述光轴对称地布置在所述第一载体44的第一侧和所述第一载体44的第二侧。更优选地,所述第三驱动元件431的从动轴120与所述第四驱动元件432的从动轴120关于所述光轴对称地布置在所述第二载体45的第一侧和所述第二载体45的第二侧。更优选地,所述第三驱动元件431的从动轴120和所述第四驱动元件432的从动轴120在所述驱动壳体41的高度方向上齐平,这样,所述对焦部分23在被所述第三驱动元件431和所述第四驱动元件432同时驱动时,所述对焦部分23在其第一侧和第二侧的移动更容易同步且更为平稳,以利于保证所述第二载体45相对于所述驱动壳体41的底表面的平整度,从而利于确保所述可变焦摄像模组的成像质量。
147.更优选地,在本技术实施例中,所述第三驱动元件431和所述第四驱动元件432的从动轴120在所述驱动壳体41的高度方向上与所述第一驱动元件421和所述第二驱动元件422的从动轴120相齐平。更优选地,在本技术实施例中,所述第一驱动元件421的从动轴120在所述驱动壳体41的宽度方向上与所述第三驱动元件431的从动轴120相对齐,和/或,所述第二驱动元件422的从动轴120在所述驱动壳体41的宽度方向上与所述第四驱动元件432的从动轴120相对齐。这样,有利于确保所述第一载体44和所述第二载体45在被移动后相互之间的一致性,以利于确保所述可变焦摄像模组的成像质量。
148.优选地,本技术实施例中,所述第一收容通道441对齐于所述第三收容通道451,和/或,所述第二收容通道442对齐于所述第四收容通道452。
149.虽然,以上以所述压电致动器100的驱动部130布置于所述第一载体44和所述第二载体45的底表面与所述驱动壳体41的底表面之间的空间为示例,应可以理解,在本技术其他示例中,所述第一驱动元件421和/或所述第二驱动元件422和/或所述第三驱动元件431和/或所述第四驱动元件432的驱动部130还可以布置于所述第一载体44和所述第二载体45的其他位置,以同样实现上述驱动模式。例如,将所述第一驱动元件421和所述第二驱动元
件422的驱动部130布置于所述第一载体44的靠近所述驱动壳体41的侧壁的侧部,以及,将所述第三驱动元件431和所述第四驱动元件432的驱动部130布置于所述第二载体45的靠近所述驱动壳体41的侧壁的侧部,对此,并不为本技术所局限。
150.进一步地,在如图1和图2所示意的示例中,所述第一驱动元件421和所述第二驱动元件422被同向地设置,以及,所述第三驱动元件431和所述第四驱动元件432被同向地设置,并且,所述第一驱动元件421与所述第三驱动元件431相对地设置,所述第二驱动元件422和所述第四驱动元件432相对地设置。
151.为了便于描述,在本技术实施例中,设定所述压电致动器100的所述压电主动部110为所述压电致动器100的头部,所述压电致动器100的所述从动轴120为所述压电致动器100的尾部,并且设定所述压电致动器100沿着所述光轴的布置方式为头部在前、其尾部在后的布置方式为第一布置方向,以及,设定所述压电致动器100沿着所述光轴的布置方式为头部在后、尾部在前的布置方式为第二布置方向。则在如图1和图2所示意的示例中,所述第一驱动元件421和所述第二驱动元件422都以第一布置方向布置,以及,所述第三驱动元件431和所述第四驱动元件432都以第二布置方向布置,以使得所述第一驱动元件421和所述第二驱动元件422被同向地设置,以及,所述第三驱动元件431和所述第四驱动元件432被同向地设置,并且,所述第一驱动元件421与所述第三驱动元件431相对地设置,所述第二驱动元件422和所述第四驱动元件432相对地设置。也就是,在该示例中,所述第一驱动元件421的从动轴120邻近于所述第三驱动元件431的从动轴120,和,所述第二驱动元件422的从动轴120邻近于所述第四驱动元件432的从动轴120。
152.特别地,在该示例中,所述变焦透镜组20中所述变焦部分22和所述对焦部分23相邻地设置,以使得所述第一驱动元件421的从动轴120与所述第三驱动元件431的从动轴120相邻近设置,以及,所述第二驱动元件422的从动轴120与所述第四驱动元件432的从动轴120相邻近地设置,这样可以在满足所述变焦部分22和所述对焦部分23的移动行程的前提下,使得所述从动轴120的尺寸得以缩减,进而使得所述压电致动器100的尺寸得以降低,使对所述压电致动器100的行程要求可以降低。并且,通过上述的布置方式,可以使所述变焦部分22和所述对焦部分23之间的距离更靠近,降低所述驱动组件40的结构设计难度。
153.在具体实施中,可通过将所述第一驱动元件421的压电主动部110固定于所述驱动壳体41的第一侧壁的方式,将所述第一驱动元件421悬持地固定于所述驱动壳体41内并且所述第一驱动元件421的从动轴120延伸入所述第一收容通道441内,例如,将所述第一驱动元件421的压电主动部110通过黏着剂附着于所述驱动壳体41的第一侧壁,其中,所述黏着剂优选地具有一定弹性。同时,通过将所述第二驱动元件422的压电主动部110固定于所述驱动壳体41的所述第一侧壁的方式,将所述第二驱动元件422悬持地固定于所述驱动壳体41内并且所述第二驱动元件422的从动轴120延伸入所述第二收容通道442内,例如,将所述第二驱动元件422的压电主动部110通过黏着剂附着于所述驱动壳体41的第一侧壁,其中,所述黏着剂优选地具有一定弹性。
154.特别地,在本技术实施例中,所述第一驱动元件421的压电主动部110与所述第二驱动元件422的压电主动部110在所述驱动壳体41的高度方向上齐平。
155.在具体实施中,可通过将所述第三驱动元件431的压电主动部110被安装于所述驱动壳体41的相对于所述第一侧壁的第二侧壁的方式,将所述第三驱动元件431悬持地固定
于所述驱动壳体41内并且所述第三驱动元件431的从动轴120延伸入所述第三收容通道451内,例如,将所述第三驱动元件431的压电主动部110通过黏着剂附着于所述驱动壳体41的第二侧壁,其中,所述黏着剂优选地具有一定弹性。同时,通过将所述第四驱动元件432的压电主动部110被安装于所述驱动壳体41的所述第二侧壁的方式,将所述第四驱动元件432悬持地固定于所述驱动壳体41内并且所述第四驱动元件432的从动轴120延伸入所述第四收容通道452内,例如,将所述第四驱动元件432的压电主动部110通过黏着剂附着于所述驱动壳体41的第二侧壁,其中,所述黏着剂优选地具有一定弹性。
156.优选地,在本技术实施例中,所述第三驱动元件431的压电主动部110与所述第四驱动元件432的压电主动部110在所述驱动壳体41的高度方向上齐平。
157.值得一提的是,在本技术其他示例中,所述第一驱动元件421、所述第二驱动元件422和所述第三驱动元件431还能够其他方式布置。例如,在如图7所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被同向地设置,所述第三驱动元件431和所述第三驱动元件431也被同向地设置,但是,与如图1所示意的布局方式不同的是,在该变形实施中,所述第一驱动元件421和所述第二驱动元件422都以第二布置方向布置,所述第三驱动元件431和所述第四驱动元件432都以第一布置方向布置。也就是,如图7所示,在该变形实施中,所述第一驱动元件421的压电主动部110邻近于所述第三驱动元件431的压电主动部110,所述第二驱动元件422的压电主动部110邻近于所述第四驱动元件432的压电主动部110。
158.相应地,在该示例中,所述第一驱动元件421、所述第三驱动元件431、所述第二驱动元件422和所述第四驱动元件432的压电主动部110相邻近地设置在所述驱动壳体41的中部。在此布置模式的前提下,所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432均从中间向外电连接,使得电路设计的结构复杂度可以被降低。
159.在具体实施中,为了安装所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432,所述驱动壳体41进一步设有关于所述光轴对称地设置于其中部的第一安装部411和第二安装部412。具体地,如图7所示,可通过所述第一驱动元件421的压电主动部110被安装于所述第一安装部411的第一侧壁的方式,将所述第一驱动元件421悬持地固定于所述驱动壳体41内并且所述第一驱动元件421的从动轴120延伸入所述第一收容通道441内,例如,将所述第一驱动元件421的压电主动部110通过黏着剂附着于所述驱动壳体41的所述第一安装部411的第一侧壁,其中,所述黏着剂优选地具有一定弹性。同时,通过将所述第二驱动元件422的压电主动部110被安装于所述第二安装部412的第一侧壁的方式,将所述第二驱动元件422悬持地固定于所述驱动壳体41内并且所述第二驱动元件422的从动轴120延伸入所述第二收容通道442内,例如,将所述第二驱动元件422的压电主动部110通过黏着剂附着于所述驱动壳体41的所述第二安装部412的第一侧壁,其中,所述黏着剂优选地具有一定弹性。
160.进一步地,可通过将所述第三驱动元件431的压电主动部110被安装于所述第一安装部411的相对于所述第一侧壁的第二侧壁的方式,将所述第三驱动元件431悬持地固定于所述驱动壳体41内并且所述第三驱动元件431的从动轴120延伸入所述第三收容通道451内,例如,将所述第三驱动元件431的压电主动部110通过黏着剂附着于所述驱动壳体41的
所述第一安装部411的第二侧壁,其中,所述黏着剂优选地具有一定弹性。同时,通过将所述第四驱动元件432的压电主动部110被安装于所述第二安装部412的相对于所述第一侧壁的第二侧壁的方式,将所述第四驱动元件432悬持地固定于所述驱动壳体41内并且所述第四驱动元件432的从动轴120延伸入所述第四收容通道452内,例如,将所述第四驱动元件432的压电主动部110通过黏着剂附着于所述驱动壳体41的所述第二安装部412的第二侧壁,其中,所述黏着剂优选地具有一定弹性。
161.当然,在本技术其他示例中,所述第一驱动元件421、所述第二驱动元件422和所述第三驱动元件431还能够其他方式布置。例如,在如图8所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被同向地设置,所述第三驱动元件431和所述第三驱动元件431也被同向地设置,但是,与如图1所示意的布局方式不同的是,在该变形实施中,所述第一驱动元件421和所述第二驱动元件422都以第一布置方向布置,所述第三驱动元件431和所述第四驱动元件432都以第一布置方向布置。也就是,如图8所示,在该变形实施中,所述第一驱动元件421的从动轴120邻近于所述第三驱动元件431的压电主动部110,所述第二驱动元件422的从动轴120邻近于所述第四驱动元件432的压电主动部110。
162.值得一提的是,在该变形实施例中,通过如上所述的布置方式,可提高所述变焦部分22和所述对焦部分23在被移动后的相互之间的一致性,以减少相对倾斜的产生。
163.图9图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。在如图9所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被同向地设置,所述第三驱动元件431和所述第三驱动元件431也被同向地设置,但是,与如图1所示意的布局方式不同的是,在该变形实施中,所述第一驱动元件421和所述第二驱动元件422都以第二布置方向布置,所述第三驱动元件431和所述第四驱动元件432都以第二布置方向布置。也就是,如图9所示,在该变形实施中,所述第一驱动元件421的压电主动部110邻近于所述第三驱动元件431的从动轴120,所述第二驱动元件422的压电主动部110邻近于所述第四驱动元件432的从动轴120。
164.图10图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。在如图10所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被异向地设置,所述第三驱动元件431和所述第三驱动元件431也被异向地设置。具体地,在该变形实施中,所述第一驱动元件421以第一布置方向布置,所述第二驱动元件422以第二布置方向布置,所述第三驱动元件431第一布置方向布置,所述第四驱动元件432以第二布置方向布置。
165.图11图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。在如图11所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被异向地设置,所述第三驱动元件431和所述第三驱动元件431也被异向地设置。但与图10所示意的布局方式不同的是,在该变形实施中,所述第一驱动元件421以第一布置方向布置,所述第二驱动元件422以第二布置方向布置,所述第三驱动元件431第二布置方向布置,所述第四驱动元件432以第一布置方向布置。
166.图12图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。在如图12所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被同向地设置,所述第三驱动元件431和所述第三驱动元件431也被异向地设置。具体地,在该变
形实施中,所述第一驱动元件421和所述第二驱动元件422以第一布置方向被同向地布置,所述第三驱动元件431第一布置方向布置,所述第四驱动元件432以第二布置方向布置。
167.图13图示了根据本技术实施例的所述可变焦摄像模组的又一个变形实施的示意图。在如图12所示意的变形实施例中,所述第一驱动元件421和所述第二驱动元件422被异向地设置,所述第三驱动元件431和所述第三驱动元件431也被同向地设置。具体地,在该变形实施中,所述第一驱动元件421以第一布置方向布置,所述第二驱动元件422以第二布置方向布置,所述第三驱动元件431和所述第四驱动元件432都以第一布置方向布置。
168.进一步地,在选择以所述压电致动器100为所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432后,所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432可通过如下方式电连接于外接电源。例如,其可通过一连接电路电连接于所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432的电极113a层115以及电极113a板111的电导通部位114,该连接电路可被实施为软板连接带或者多条引线,以通过该连接电路与外部电连接。进一步地,当该压电致动器100设置在驱动壳体41中时,所述压电致动器100适于直接通过软板向外导出,从而与所述感光组件30的线路板31进行电连接。
169.在本技术其他示例中,所述第一驱动元件421、所述第二驱动元件422、所述第三驱动元件431和所述第四驱动元件432也可以直接通过软板向外导出,并与所述感光组件30的线路板31电连接。或者,在所述驱动壳体41的表面设置至少二lds槽,所述lds槽深度不大于20~30μm,宽度不小于60μm,在槽内运用lds(激光直接成型技术),在lds槽表面镀设导电镀层(例如可以是镍钯金的镀层),从而可以避免内部其他金属干扰,将所述第一驱动元件421和所述第二驱动元件422的连接电路与lds槽中的导电镀层相连接,从而导出电路,并与所述感光组件30的线路板31电连接。又或者,还可以通过insert molding(嵌入式注塑)技术,将至少二导线成型在所述驱动壳体41中,从而将所述第一驱动元件421和所述第二驱动元件422的连接电路与导线电连接从而导出电路,并与所述感光组件30的线路板31电连接。
170.综上,基于本技术实施例的所述可变焦摄像模组被阐明,其中,所述可变焦摄像模组采用压电致动器100作为驱动器以不仅能够提供足够大的驱动力,而且,能够提供精度更高和行程更长的驱动性能,以满足所述可变焦摄像模组的变焦需求。
171.进一步地,在本技术实施例中,所述压电致动器100具有相对较小的尺寸,以更好地适配于摄像模组轻型化和薄型化的发展趋势。并且,所述可变焦摄像模组采用合理的布设方案将所述压电致动器100布设于所述可变焦摄像模组中,以满足可变焦摄像模组的结构和尺寸要求。
172.进一步地,在本技术实施例中,所述压电致动器100的至少一部分被布设于所述可变焦摄像模组中原本被闲置的空间中,以使得所述可变焦摄像模组内的空间能够更为充分地被应用,提高所述可变焦摄像模组的空间布设的紧凑度。
173.进一步地,在本技术实施例中,所述可变焦摄像模组通过至少一对压电致动器100分别从待驱动对象的相对的两侧提供驱动力,以使得该待驱动对象的移动更为平稳。
174.值得一提的是,在本技术其他示例中,所述可变焦摄像模组的驱动组件40,进一步包括用于驱动所述光转折元件10进行移动的第五驱动元件(未有图示意),例如,通过所述第五驱动元件驱动所述光转折元件10进行旋转以实现所述可变焦摄像模组的光学防抖功
能。
175.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。