技术特征:
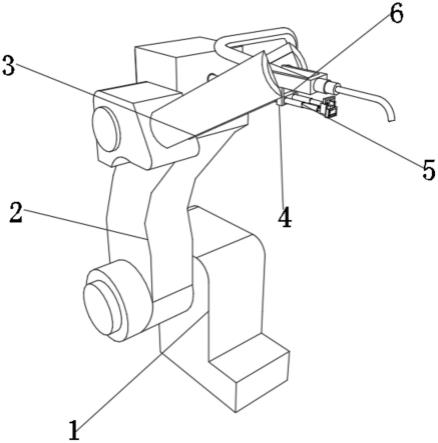
1.一种带视觉跟踪器的智能机器人焊接机,包括机器人焊接机(1),其特征在于:所述机器人焊接机(1)包括有第一机械臂(2)、第二机械臂(3)和第三机械臂(6),所述第三机械臂(6)的下表面焊接有两组连接杆(4),两组所述连接杆(4)之间焊接有连接块一(7),所述连接块一(7)远离所述第一机械臂(2)的一侧外表面焊接有电动伸缩杆一(5),所述电动伸缩杆一(5)的输出端焊接有连接板(8),两组所述连接板(8)相邻的一侧外表面均固定有轴承(12),所述轴承(12)的内部固定连接有旋转杆(11),两组所述旋转杆(11)之间焊接有连接块二(22),所述连接块二(22)的上表面开设有卡槽,且所述连接块二(22)的卡槽内部插接有卡块(23),所述卡块(23)远离所述连接块二(22)的一侧外表面焊接有视觉跟踪器(13),所述连接板(8)的上表面焊接有u型连接板(9),所述u型连接板(9)的内部下表面焊接有液压缸(10),所述液压缸(10)的输出端拆卸连接在所述视觉跟踪器(13)的上表面。2.如权利要求1所述的一种带视觉跟踪器的智能机器人焊接机,其特征在于:所述连接板(8)远离所述电动伸缩杆一(5)的一侧开设有卡槽,且所述连接板(8)的卡槽内部滑动连接有防护罩(14),所述连接板(8)的上表面焊接有固定块二(25),所述防护罩(14)的上表面焊接有固定块一(16),所述固定块二(25)和所述固定块一(16)的内部均开设有孔洞,且所述固定块二(25)和所述固定块一(16)的孔洞内部插接有插销(15)。3.如权利要求2所述的一种带视觉跟踪器的智能机器人焊接机,其特征在于:所述防护罩(14)的内部开设有卡槽一,且所述防护罩(14)的卡槽一内部设置有防护玻璃(20)。4.如权利要求3所述的一种带视觉跟踪器的智能机器人焊接机,其特征在于:所述防护罩(14)远离所述连接板(8)的一侧外表面开设有卡槽二,且所述防护罩(14)的卡槽内部表面滑动连接有l型连接杆(18),所述l型连接杆(18)靠近所述防护罩(14)的一侧内侧壁开设有卡槽,且所述l型连接杆(18)的卡槽内部滑动连接有清洁毛刷(19)。5.如权利要求4所述的一种带视觉跟踪器的智能机器人焊接机,其特征在于:所述防护罩(14)远离所述连接板(8)的一侧外表面焊接有顶板(21),所述顶板(21)的下表面焊接有电动伸缩杆二(17),所述电动伸缩杆二(17)的输出端焊接在所述l型连接杆(18)的上表面。6.如权利要求1所述的一种带视觉跟踪器的智能机器人焊接机,其特征在于:所述卡块(23)的上表面开设有螺纹孔,且所述卡块(23)的内部螺纹连接有螺丝(24),所述螺丝(24)的外部螺纹穿过所述卡块(23)连接在所述连接块二(22)的内部。
技术总结
本实用新型涉及智能机器人焊接机技术领域,公开了一种带视觉跟踪器的智能机器人焊接机。本实用新型中包括机器人焊接机、第三机械臂、连接杆和连接块一,连接块一远离第三机械臂的一侧外表面焊接有电动伸缩杆一,电动伸缩杆一的输出端焊接有连接板,两组连接板相邻的一侧外表面均固定有轴承,轴承的内部固定有旋转杆,两组旋转杆之间焊接有连接块二,连接块二的上表面开设有卡槽,连接块二的卡槽内部插接有卡块,卡块的一侧外表面焊接有视觉跟踪器,连接板的上表面焊接有U型连接板,U型连接板的下表面焊接有液压缸,液压缸的输出端拆卸连接在视觉跟踪器的上表面,通过启动液压缸带动视觉跟踪器进行转动,使得视觉跟踪器可调节角度。角度。角度。
技术研发人员:黎智伟 邓艳夏 龙进海
受保护的技术使用者:广州共富科技有限公司
技术研发日:2022.04.02
技术公布日:2022/8/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。