1.本发明属于机械制造技术领域,尤其是涉及一种双凸轮驱动取料装置及方法。
背景技术:
2.取料夹爪(机械手)是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,拾放取料夹爪主要用于自动化生产线中,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
3.取料夹爪可代替人工不断重复工作和劳动,可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。取料夹爪作业的准确性和各种环境中完成作业的能力,在各个领域的不同场景具备广阔的发展前景。
4.由于整体的取料夹爪的成本较高,现有技术中通常只采用其夹爪部分,将其夹爪部分设置于直线移动装置上,通过直线移动装置(如直线模组)驱动夹爪移动,以将工件移动至指定位置。采用直线移动装置时其需要至少两个动力源才能驱动夹爪带动工件灵活移动,所以其成本消耗较大,且易故障。
技术实现要素:
5.本发明的目的就是为了解决现有技术中存在的上述问题,提供一种双凸轮驱动取料装置及方法。
6.本发明的目的通过以下技术方案来实现:双凸轮驱动取料装置及方法,包括基座,设置于所述基座上的动力源,设置于所述动力源两侧的驱动装置,以及取料组件;所述驱动装置包括两个同轴且相互平行的第一凸轮和第二凸轮,由所述第一凸轮驱动的第一摆杆,以及由所述第二凸轮驱动的第二摆杆;所述第一摆杆和所述第二摆杆的自由端与所述取料组件连接,并驱动所述取料组件沿上下前后移动,所述取料组件上至少设置有取料夹爪。
7.优选的,所述动力源为凸轮分割器,其驱动所述第一凸轮和所述第二凸轮旋转。
8.优选的,所述取料组件包括与所述第二摆杆滑动连接的上支架,位于所述上支架下方的连接块,以及设置于所述连接块下方的取料支架;所述取料支架上设置有至少一个取料夹爪,所述取料夹爪为气缸夹爪。
9.优选的,所述第一摆杆和所述第二摆杆均设置于所述基座上;所述第一摆杆的顶端枢轴连接于所述基座的顶部,并绕该枢轴点旋转;所述第一摆杆的主体部分始终与所述第一凸轮的外边缘抵接,其底端通过连杆与所述连接块连接;所述第一摆杆绕枢轴点前后移动;所述第一凸轮驱动所述取料组件沿所述第一摆杆的摆动方向移动。
10.优选的,所述第二摆杆包括一体连接的第一连接杆,第二连接杆和第三连接杆;所述第一连接杆和第二连接杆位于同一轴线上,所述第三连接杆与所述第一连接杆之间形成夹角;所述第三连接杆的绕所述第一连接杆处的枢轴点上下移动。
11.优选的,所述第一连接杆的自由端与所述基座的顶部枢轴连接,并绕该枢轴点旋
转;所述第二连接杆的自由端设置有凸轮随动器,并始终与所述第二凸轮的外边缘接触;所述第三连接杆的自由端与所述上支架连接;所述第二凸轮驱动所述取料夹爪沿所述第二摆杆的摆动方向移动。
12.优选的,所述基座与所述连接块之间连接有导向杆;所述导向杆的一端与所述连接块固定连接,其另一端贯穿所述基座;且所述基座上的通孔内径大于所述导向杆的外径。
13.优选的,所述基座的顶端还设置有用于放置微调气缸的气缸支架;所述微调气缸的气缸轴分别与所述第一摆杆和所述第二摆杆连接,并驱动所述取料组件移动。
14.双凸轮驱动取料方法,包括上述任一所述的双凸轮驱动取料装置,及如下步骤:s1,启动动力源,驱动第一凸轮和第二凸轮旋转,进而带动第一摆杆和第二摆杆绕枢轴点旋转;s2,第一摆杆旋转,带动取料组件沿基座的前后方向移动;s3,第二摆杆旋转,带动取料组件沿基座的上下方向移动;s4,启动微调气缸,驱动第一摆杆和第二摆杆向基座的前方移动,进而带动取料组件的取料夹爪同步移动;s5,启动取料夹爪,驱动夹爪取料。
15.本发明技术方案的优点主要体现在:自动化,采用动力源自驱动两个凸轮旋转,以带动与两个凸轮一一对应的摆杆移动,进而带动取料夹爪沿上下、左右方向移动,全程自动化处理,无需人工干预,同时相对采用现有技术中揭示的采用直线电机的方式而言,本设计只需一个动力源,其成本更低;稳定性高,采用两个凸轮驱动两个摆杆及取料夹爪移动,其移动过程比较稳定,且在移动时通过导杆对取料夹爪进行限定,进一步增强移动过程的稳定性;灵活度高,通过微调气缸带动两个摆杆及取料夹爪沿基座前后方向移动,小幅度调整取料夹爪的位置,以适应不同尺寸的工件的抓取,提高取料的灵活度。
附图说明
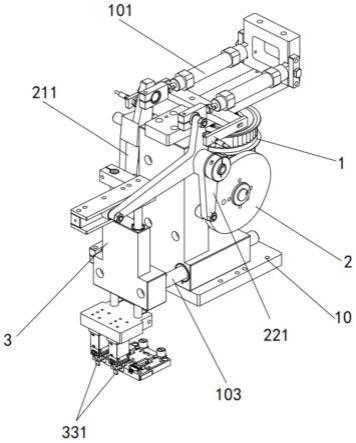
16.图1:本发明优选实施例的立体图;图2:本发明优选实施例的左视图;图3:本发明优选实施例的右视图。
具体实施方式
17.本发明的目的、优点和特点,将通过下面优选实施例的非限制性说明进行图示和解释。这些实施例仅是应用本发明技术方案的典型范例,凡采取等同替换或者等效变换而形成的技术方案,均落在本发明要求保护的范围之内。
18.在方案的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。并且,在方案的描述中,以操作人员为参照,靠近操作者的方向为近端,远离操作者的方向为远端。
19.如图1至图3所示,本发明揭示了一种双凸轮驱动取料装置,包括基座10,设置于所述基座10上的动力源1。所述动力源1在本发明有优选为凸轮分割器,当然在其他实施例中所述动力源1还可以为可自转的辊轴或电机或其他具有旋转功能的现有技术所揭示的装置,在此不再一一赘述。
20.如图2至图3所示,所述动力源1的两侧设置有驱动装置2,所述驱动装置2包括两个同轴且相互平行的第一凸轮21和第二凸轮22,由所述第一凸轮21驱动的第一摆杆211,以及由所述第二凸轮22驱动的第二摆杆221。所述动力源1驱动所述第一凸轮21和所述第二凸轮22旋转。具体的,如图2所示,所述第一摆杆211和所述第二摆杆221均设置于所述基座10上,其中,所述第一摆杆211的顶端枢轴连接于所述基座10的顶部,并绕该枢轴点旋转;所述第一摆杆211的主体部分始终与所述第一凸轮21的外边缘抵接,其底端通过连杆212与所述连接块32连接。启动所述第一凸轮21后,将驱动所述第一摆杆211绕枢轴点前后移动,同时带动与所述第一摆杆211连接的取料组件3同步摆动;即所述取料组件3由所述第一摆杆211带动其沿所述基座10的前后方向移动。
21.进一步的如图3所示,所述第二摆杆221包括一体连接的第一连接杆2211,第二连接杆2212和第三连接杆2213。其中所述第一连接杆2211和第二连接杆2212位于同一轴线上,所述第三连接杆2213与所述第一连接杆2211之间形成夹角。所述第一连接杆2211的自由端与所述基座10的顶部枢轴连接,并绕该枢轴点旋转;所述第二连接杆2212的自由端设置有凸轮随动器,并始终与所述第二凸轮22的外边缘接触;所述第三连接杆2213的自由端与所述取料组件3的顶端连接。启动所述第二凸轮221后,将驱动所述第二摆杆221绕所述第一连接杆2211的绕枢轴点旋转,此时第二连接杆2212与所述第二凸轮22的外边缘接触,且所述第三连接杆2213绕所述第一连接杆2211处的枢轴点上下移动;即所述第二凸轮22驱动所述取料组件3沿所述第二摆杆221的摆动方向移动,进一步而言,所述第二凸轮22驱动所述取料组件3沿上下前后移动。
22.如图2或图3所示,所述驱动装置2的所述第一摆杆211和所述第二摆杆221与取料组件3连接,并驱动取料组件3移动,以抓取工件或料体。具体的,所述取料组件3包括与所述第二摆杆221滑动连接的上支架31,位于所述上支架31下方的连接块32,以及设置于所述连接块32下方的取料支架33。进一步的,所述上支架31的下方设置有滑杆,该滑杆优选为可伸缩式的,其贯穿所述连接块32,且所述连接块32沿该滑杆的设置方向移动。所述取料支架33上设置有至少一个取料夹爪331。所述上支架31上形成有滑槽,所述第二摆杆221上的第三连接杆2213上设置有滑块,该滑块直径与滑槽宽度相当;当所述取料组件3由所述第一摆杆21驱动其沿所述基座10的前后方向移动时,该滑槽相对该滑块移动。所述取料夹爪331为气缸夹爪,由于气缸夹爪结构为现有技术,在此不做赘述。
23.如图1或图3所示,所述基座10与所述连接块32之间连接有导向杆103;所述导向杆103的一端与所述连接块32固定连接,其另一端贯穿所述基座10;且所述基座10上的通孔内径大于所述导向杆103的外径。当所述第二凸轮22驱动所述第二摆杆221及所述取料夹爪2213上下移动时,所述导向杆103在所述基座10的通孔内上下浮动,同时通过所述导向杆103对所述取料组件3起到限位作用,使其在移动过程中不会晃动,增强其移动过程的稳定性。所述基座10的顶端还设置有用于放置微调气缸101的气缸支架100;所述微调气缸101的气缸轴分别与所述第一摆杆211和所述第二摆杆221连接。启动所述微调气缸101后,其将驱
动所述第一摆杆211和所述第二摆杆221移动,移动后所述第二摆杆221中的第二连接杆2212自由端始终与所述第二凸轮的边缘抵接;进一步驱动所述取料组件3的所述取料夹爪331移动。通过所述微调气缸101进一步调节所述取料夹爪331至工件之间的距离,可满足不同尺寸的工件的夹取。
24.双凸轮驱动取料方法,包括上述任一所述的双凸轮驱动取料装置,以及如下步骤:s1,启动动力源1,驱动第一凸轮21和第二凸轮22旋转,进而带动第一摆杆211和第二摆杆221绕枢轴点旋转;s2,第一摆杆211旋转,带动取料组件3沿基座10的前后方向移动;s3,第二摆杆221旋转,带动取料组件3沿基座10的上下方向移动;s4,启动微调气缸101,驱动第一摆杆211和第二摆杆221向基座10的前方移动,进而带动取料组件3的取料夹爪331同步移动;s5,启动取料夹爪331,驱动夹爪取料。
25.本发明尚有多种实施方式,凡采用等同变换或者等效变换而形成的所有技术方案,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
