1.本发明属于马达生产技术领域,尤其涉及一种有线微马达自动产线。
背景技术:
2.传统生产无线马达时,常用分割机带动转盘主机台连接各个工位,但是这种方式不能运用在有线马达的生产上,有线马达在生产的过程中,仅能采用直线式倍速链传动的方式进行加工,并且现有技术中缺少针对有线马达生产的有线特性研发的载具,在加工过程中容易造成载具锁死的问题。
技术实现要素:
3.本发明的目的在于提供一种有线微马达自动产线,旨在解决所述背景技术中存在的问题。为实现所述目的,本发明采用的技术方案是:
4.一种有线微马达自动产线,进一步的,包括整机,所述整机设有主机模块与转接机构,所述主机模块包括前倍速链与后倍速链,所述前倍速链安装在所述后倍速链的前端,左右相邻两个所述主机模块的前倍速链与后倍速链相互接驳安装,所述前倍速链与所述后倍速链均安装有载具,所述后倍速链从左向右传输所述载具,所述前倍速链从右向左传送所述载具,所述转接机构安装在所述整机的左右两端,所述转接机构连接所述前倍速链与所述后倍速链安装,所述主机模块设有加工组件,前倍速链与所述后倍速链对应加工组件的位置设有定位模组。
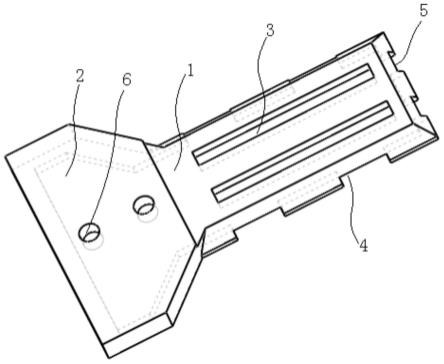
5.进一步的,所述载具包括载具面板,所述载具面板的上端中部设有产品槽,所述载具面板的上端安装有夹线夹;
6.所述夹线夹包括固定夹板与活动夹板,所述固定夹板固定安装在所述载具面板上,所述活动夹板设有按夹位,所述按夹位的下端设有上弹簧槽,所述载具面板的上端设有下弹簧槽,所述上弹簧槽与所述下弹簧槽之间连接有夹线弹簧。针对有线微马达的加工生产,通过夹具上的夹线夹能够将线夹紧,避免在加工过程中产品的线脱落等情况出现,解决了传统生产过程中有线产品容易造成工位锁死载具的问题。
7.进一步的,所述定位模组包括初定位组件、止料阻挡组件与精定位组件,所述初定位组件与所述止料阻挡组件左右排列设置,所述初定位组件与所述止料阻挡组件之间安装有所述精定位组件;
8.所述初定位组件包括初定位气缸,所述初定位气缸的驱动端安装有初定位板;所述止料阻挡组件包括止料阻挡气缸,所述止料阻挡气缸的驱动端安装有止料阻挡板,所述载具面板的左右两端设有挡料槽;所述止料阻挡气缸的宽度等于所述止料阻挡板的宽度,所述初定位板的宽度大于所述止料阻挡板的宽度;所述精定位组件包括精定位气缸,所述精定位气缸的上端安装有精定位承载板,所述精定位承载板安装有精定位导柱,所述载具面板开设有精定位孔,所述精定位导柱可贯穿所述精定位孔;所述初定位板升起时防止要加工的载具流向下一工位,当止料阻挡板升起时挡住后面的载具来料,精定位导柱贯穿精
定位孔升起,定位模组对载具进行进一步精确定位,如果完成精定位的步骤则通过加工组件进行加工。
9.进一步的,所述转接机构包括转接导轨、转接滑台、滑台驱动器、推料气缸与挡料气缸,所述转接滑台安装在所述转接导轨的上端,所述滑台驱动器安装在所述转接导轨的侧端,所述滑台驱动器连接所述转接滑台安装,所述推料气缸安装在所述转接导轨的外侧端,所述挡料气缸安装在所述转接导轨的内侧端,加工顺序有前倍速链从右向左将物料进行加工,待载具传输至前倍速链的最左端时,通过转接机构将载具从前倍速链转移到后倍速链上,后倍速链将载具从左向右运输。
10.进一步的,所述整机还包括入料机构,所述主机模块包括第一主机、第二主机、第三主机与第四主机,所述第一主机、所述第二主机、所述第三主机与所述第四主机依次从右向左排列,所述入料机构安装在所述第一主机的右端,所述入料机构包括机壳铆针组件、机壳装三叶片组件与机壳导轨,所述机壳导轨的前端安装有所述机壳铆针组件与所述机壳装三叶片组件;
11.所述第一主机包括第一前倍速链、第一后倍速链、有线护线壳组装模块、整型组件与出料导轨,所述有线护线壳组装模块安装在所述第一前倍速链的前端,所述整型组件与所述出料导轨安装在所述第一后倍速链的后端,所述整型组件安装在所述出料导轨的左端;
12.所述第二主机包括第二前倍速链、第二后倍速链、盖板组装组件、极板组装组件、出力轴组装组件与轴套组装组件,所述盖板组装组件与所述极板组装组件安装在所述第二前倍速链的前端,所述盖板组装组件安装在所述极板组装组件的右端,所述出力轴组装组件与所述轴套组装组件安装在所述第二后倍速链的后端,所述出力轴组装组件安装在所述轴套组装组件的左端;
13.所述第三主机包括第三前倍速链、第三后倍速链、转子组装组件、ccd检测组件与三齿打油组件,所述转子组装组件安装在所述第三前倍速链的前端,所述ccd检测组件与所述三齿打油组件安装在所述第三后倍速链的后端,所述ccd检测组件安装在所述三齿打油组件的左端;
14.所述第四主机包括第四前倍速链、第四后倍速链、第一转接机构、齿轮板组装组件、第一齿轮组装组件、第二齿轮组装组件与第三齿轮组装组件,所述第一转接机构安装在所述第四前倍速链与所述第四后倍速链的左端,所述齿轮板组装组件与所述第一齿轮组装组件安装在所述第四前倍速链的前端,所述第一齿轮组装组件安装在所述齿轮板组装组件的左端,所述第二齿轮组装组件与第三齿轮组装组件安装在所述第四后倍速链的后端,所述第二齿轮组装组件安装在所述第三齿轮组装组件的左端;所述机壳导轨左端对应所述第一后倍速链的位置安装,所述第一前倍速链与所述第一后倍速链中间右侧安装有机壳夹爪组件,所述第一前倍速链与所述第一后倍速链的右端安装有所述第二转接机构。通过设计入料机构、第一主机、第二主机、第三主机与第四主机,使得产品按顺序完成多道工序的组装。
15.本发明的有益效果:
16.本发明针对有线微马达的加工生产,在载具上设计了夹线夹,能够牢牢固定住微马达的电线,避免在生产过程中微马达的电线散落,解决了传统有线微马达生产过程中容
易造成转盘工位锁死载具的问题,并且针对各个加工组件的位置在前倍速链与后倍速链的下端设置了定位模组,使得载具在流转到一个工位时先对载具与产品进行精确的定位,提高加工的精确性、提高加工的质量。
附图说明
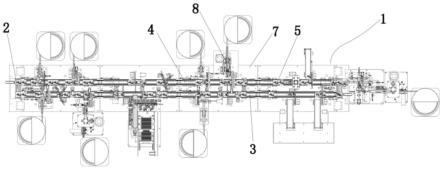
17.图1为本发明实施例提供的一种有线微马达自动产线整体俯视示意图;
18.图2为本发明实施例提供的一种有线微马达自动产线倍速链结构示意图;
19.图3为本发明实施例提供的一种有线微马达自动产线载具与定位模组结构示意图;
20.图4为本发明实施例提供的一种有线微马达自动产线载具结构示意图;
21.图5为本发明实施例提供的一种有线微马达自动产线夹线夹爆炸结构示意图。
22.图6为本发明实施例提供的一种有线微马达自动产线载具转接机构结构示意图。
23.图7为本发明实施例提供的一种有线微马达自动产线整机分布结构示意图。
24.图8为本发明实施例提供的一种有线微马达自动产线入料机构结构示意图。
25.图9为本发明实施例提供的一种有线微马达自动产线第一主机结构示意图。
26.图10为本发明实施例提供的一种有线微马达自动产线第二主机结构示意图。
27.图11为本发明实施例提供的一种有线微马达自动产线第三主机结构示意图。
28.图12为本发明实施例提供的一种有线微马达自动产线第四主机结构示意图。
29.其中,图中各附图标记:
30.1.整机;11.入料机构;111.机壳铆针组件;112.机壳装三叶片组件;113.机壳导轨;2.转接机构;21.转接导轨;22.转接滑台;23.滑台驱动器;24.推料气缸;25.挡料气缸;3.前倍速链;4.后倍速链;5.载具;51.载具面板;511.产品槽;512.下弹簧槽;513.挡料槽;514.精定位孔;52.夹线夹;521.固定夹板;522.活动夹板;523.按夹位;524.上弹簧槽;53.夹线弹簧;6.定位模组;61.初定位组件;611.初定位气缸;612.初定位板;62.止料阻挡组件;621.止料阻挡气缸;622.止料阻挡板;63.精定位组件;631.精定位气缸;632.精定位导柱;633.精定位承载板;7.主机模块;71.第一主机;711.第一前倍速链;712.第一后倍速链;713.有线护线壳组装模块;714.整型组件;715.出料导轨;716.第二转接机构;717.机壳夹爪组件;72.第二主机;721第二前倍速链;722.第二后倍速链;723.盖板组装组件;724.极板组装组件;725.出力轴组装组件;726.轴套组装组件;73.第三主机;731.第三前倍速链;732.第三后倍速链;733.转子组装组件;734.ccd检测组件;735.三齿打油组件;74.第四主机;741.第四前倍速链;742.第四后倍速链;743.第一转接机构;744.齿轮板组装组件;745.第一齿轮组装组件;746.第二齿轮组装组件;747.第三齿轮组装组件;8.加工组件。
具体实施方式
31.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
32.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上
或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,本文所使用的术语“上端”、“下端”、“左侧”、“右侧”、“前端”、“后端”以及类似的表达是参考附图的位置关系。
33.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
34.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
35.如图1~12所示,本发明实施例提供了一种有线微马达自动产线,包括整机1,整机1设有主机模块7与转接机构2,主机模块7包括前倍速链3与后倍速链4,前倍速链3安装在后倍速链4的前端,左右相邻两个主机模块7的前倍速链3与后倍速链4相互接驳安装,前倍速链3与后倍速链4均安装有载具5,后倍速链4从左向右传输载具5,前倍速链3从右向左传送载具5,转接机构2安装在整机1的左右两端,转接机构2连接前倍速链3与后倍速链4安装,主机模块7设有加工组件8,前倍速链3与后倍速链4对应加工组件8的位置设有定位模组6。
36.在本实施例中,载具5包括载具面板51,载具面板51的上端中部设有产品槽511,载具面板51的上端安装有夹线夹52。
37.在本实施例中,夹线夹52包括固定夹板521与活动夹板522,固定夹板521固定安装在载具面板51上,活动夹板522设有按夹位523,按夹位523的下端设有上弹簧槽524,载具面板51的上端设有下弹簧槽512,上弹簧槽524与下弹簧槽512之间连接有夹线弹簧53。
38.在本实施例中,定位模组6包括初定位组件61、止料阻挡组件62与精定位组件63,初定位组件61与止料阻挡组件62左右排列设置,初定位组件61与止料阻挡组件62之间安装有精定位组件63。
39.在本实施例中,初定位组件61包括初定位气缸611,初定位气缸611的驱动端安装有初定位板612;止料阻挡组件62包括止料阻挡气缸621,止料阻挡气缸621的驱动端安装有止料阻挡板622,载具面板51的左右两端设有挡料槽513。
40.在本实施例中,止料阻挡气缸621的宽度等于止料阻挡板622的宽度,初定位板612的宽度大于止料阻挡板622的宽度。
41.在本实施例中,精定位组件63包括精定位气缸631,精定位气缸631的上端安装有精定位承载板633,精定位承载板633安装有精定位导柱632,载具面板51开设有精定位孔514,精定位导柱632可贯穿精定位孔514。
42.在本实施例中,转接机构2包括转接导轨21、转接滑台22、滑台驱动器23、推料气缸24与挡料气缸25,转接滑台22安装在转接导轨21的上端,滑台驱动器23安装在转接导轨21的侧端,滑台驱动器23连接转接滑台22安装,推料气缸24安装在转接导轨21的外侧端,挡料气缸25安装在转接导轨21的内侧端。
43.在本实施例中,整机1还包括入料机构11,主机模块7包括第一主机71、第二主机72、第三主机73与第四主机74,第一主机71、第二主机72、第三主机73与第四主机74依次从右向左排列,入料机构11安装在第一主机71的右端,入料机构11包括机壳铆针组件111、机
壳装三叶片组件112与机壳导轨113,机壳导轨113的前端安装有机壳铆针组件111与机壳装三叶片组件112;
44.第一主机71包括第一前倍速链711、第一后倍速链712、有线护线壳组装模块713、整型组件714与出料导轨715,有线护线壳组装模块713安装在第一前倍速链711的前端,整型组件714与出料导轨715安装在第一后倍速链712的后端,整型组件714安装在出料导轨715的左端;
45.第二主机72包括第二前倍速链721、第二后倍速链722、盖板组装组件723、极板组装组件724、出力轴组装组件725与轴套组装组件726,盖板组装组件723与极板组装组件724安装在第二前倍速链721的前端,盖板组装组件723安装在极板组装组件724的右端,出力轴组装组件725与轴套组装组件726安装在第二后倍速链722的后端,出力轴组装组件725安装在轴套组装组件726的左端;
46.第三主机73包括第三前倍速链731、第三后倍速链732、转子组装组件733、ccd检测组件734与三齿打油组件735,转子组装组件733安装在第三前倍速链731的前端,ccd检测组件734与三齿打油组件735安装在第三后倍速链732的后端,ccd检测组件734安装在三齿打油组件735的左端;
47.第四主机74包括第四前倍速链741、第四后倍速链742、第一转接机构743、齿轮板组装组件744、第一齿轮组装组件745、第二齿轮组装组件746与第三齿轮组装组件747,第一转接机构743安装在第四前倍速链741与第四后倍速链742的左端,齿轮板组装组件744与第一齿轮组装组件745安装在第四前倍速链741的前端,第一齿轮组装组件745安装在齿轮板组装组件744的左端,第二齿轮组装组件746与第三齿轮组装组件747安装在第四后倍速链742的后端,第二齿轮组装组件746安装在第三齿轮组装组件747的左端。
48.在本实施例中,机壳导轨113左端对应第一后倍速链712的位置安装,第一前倍速链711与第一后倍速链712中间右侧安装有机壳夹爪组件717,第一前倍速链711与第一后倍速链712的右端安装有第二转接机构716。
49.工作方式:
50.在加工过程中,第一前倍速链711、第二前倍速链721、第三前倍速链731与第四前倍速链741相互接驳成前倍速链3整体,第一后倍速链712、第二后倍速链722、第三后倍速链732与第四后倍速链742相互接驳成后倍速链4整体,前倍速链3将载具5从右向左传输,后倍速链4将载具5从左向右传输,整机1由第一主机71、第二主机72、第三主机73、第四主机74与入料机构11组成,整机1在前倍速链3的前端与后倍速链4的后端设置有多个工位组件,整机1通过工位组件完成加工动作;对应各个加工组件8的位置,前倍速链3与后倍速链4的下端设置有定位模组6,当载具5流转至定位模组6上端时,初定位气缸611驱动初定位板612升起,初定位板612挡住载具5使其不能继续前行,止料阻挡气缸621驱动止料阻挡板622升起,止料阻挡板622对后续来料的载具5进行止退,止料阻挡板622会从挡料槽513中穿出,最后精定位气缸631驱动左右并排的精定位导柱632进行精确定位,精定位导柱632能贯穿精定位孔514则完成精定位,完成精定位加工组件8对载具5上的产品进行加工;整机1在第一主机71的右端与第四主机74的左端均设置有转接机构2,使得载具5在前倍速链3与后倍速链4上能实现循环的环形运动。
51.入料机构11通过机壳铆针组件111与机壳装三叶片组件112完成机壳内安装铆针
与三叶片的工序后,将机壳通过机壳导轨113传输至机壳导轨113的左端,机壳导轨113的左端对应第一后倍速链712的位置安装,第一主机71的机壳夹住组件将机壳导轨113上的机壳夹装至第一后倍速链712右端的载具5上,第二转接机构716将载有机壳的载具5向前传送至第一前倍速链711的右端后推料气缸24将载具5推入第一前倍速链711上;
52.第一前倍速链711将载具5传送至有线护线壳组装模块713,有线护线壳组装模块713是通过人工完成护线壳的组装,并将护线壳的电线用夹线夹52夹好固定;第一前倍速链711将载具5传输至第二前倍速链721上,载具5依次通过盖板组装组件723与极板组装组件724,盖板组装组件723对载具5上的产品安装盖板,极板组装组件724对载具5上的产品安装极板;
53.第二前倍速链721将载具5传送至第三前倍速链731上,第三前倍速链731将载具5传输至转子组装组件733,产品完成转子的安装;
54.第三前倍速链731将载具5传输至第四前倍速链741上,第四前倍速链741将载具5依次通过齿轮板组装组件744与第一齿轮组装组件745,产品在齿轮板组装组件744上完成齿轮板的安装,在第一齿轮组装组件745上完成第一齿轮的安装,载具5到达第一转接机构743,第一转接机构743将载具5从第四前倍速链741传输至第四后倍速链742上;
55.第四后倍速链742将载具5依次传输至第二齿轮组装组件746与第三齿轮组装组件747,第二齿轮组装组件746对产品组装第二齿轮,第三齿轮组装组件747对产品组装第三齿轮;
56.第四后倍速链742将载具5传输至第三后倍速链732上,第三后倍速链732将载具5依次传输至ccd检测组件734与三齿打油组件735,ccd检测组件734检测产品是否装齐三个齿轮,三齿打油组件735对在第四主机74安装的齿轮进行注油;
57.第三后倍速链732将载具5传输至第二后倍速链722上,第二后倍速链722依次将载具5传输至出力轴组装组件725与轴套组装组件726,出力轴组装组件725对产品安装出力轴,轴套组装组件726对产品的出力轴安装轴套;
58.第二后倍速链722将载具5传输至第一后倍速链712上,第一后倍速链712将载具5传输至整型组件714,整型组件714对产品进行整型,完成整型后第一后倍速链712传输至出料导轨715上,出料导轨715上设有机械夹爪将产品从载具5中取下,并放置在出料导轨715上完成出料,载具5完成卸料后被传输至第一后倍速链712的右端完成一个加工循环。
59.以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。