1.本发明涉及竞技滑板运动的技术领域,尤其是涉及一种极限滑板车。
背景技术:
2.滑板车(bicman)是继传统滑板之后的又一滑板运动的新型产品形式。滑板车速度可以达到20公里/时,这种新型产品来源于科技先进的日本,但却是一位德国工人发明的,它是一种简单的省力运动机械。
3.玩滑板车必须有高度的悟性和胆量,这正符合想象力丰富,喜欢挑战的青少年们的口味,如今滑板车已成为青少年新一代的潮流运动产品。利用极限滑板车进行的表演为极限轮滑表演,极限轮滑表演是近年来最受年轻人喜爱的体育运动,极富挑战性以及能充分展示个性的特性不仅使得轮滑运动更加深入人心。
4.滑板车由于速度适中,好学易操纵,有刹车装置(踩后轮刹车),如果只是平时代步、普通娱乐,一般情况下不容易摔倒。所以它适合多种年龄层的使用,特别在青少年中更是让人爱不释手,以拥有一车辆为荣。滑板车对青少年正在发育完善的平衡系统更是有良好的锻炼效果;而现有技术中,人员采用极限滑板车对于一些新动作进行初步训练和练习时,较难掌握,成功率较低,因此有待改进。
技术实现要素:
5.为了降低在人员动作练习的难度,提高练习成功率,本技术提供一种极限滑板车。
6.本技术的上述发明目的一是通过以下技术方案得以实现的:
7.一种极限滑板车,包括:
8.多个分布于踏板各第一预设位置的压力传感器,所述压力传感器用于采集自身所在第一预设位置的压力值;
9.多个嵌设于踏板表面各第二预设位置的显示灯;
10.角度探测装置,用于采集前轮的转动角度信息;
11.处理器,所述处理器内置有踏板模型,所述踏板模型内各坐标一一对应于踏板各位置,所述处理器包括:
12.压力变化速率曲线生成模块,用于根据接收到的各压力传感器的压力值生成第一时间跨度内每个第一预设位置的压力变化速率曲线,所述第一时间跨度为接收到启动信号和停止信号之间的时间跨度;
13.第一匹配模块,用于根据每个第一预设位置的压力变化速率曲线在动作集中匹配得到多个似然动作;
14.角度变化曲线生成模块,用于根据接收到的前轮转动角度信息生成第一时间跨度内的角度变化曲线;
15.筛选模块,用于根据所述角度变化曲线在多个似然动作中择出最适配动作;
16.脚参数获取模块,用于获取用户的踩踏脚以及脚尺码;
17.第二匹配模块,用于根据用户的踩踏脚、脚尺码和所述最适配动作在数据库中匹配得到踏板模型内的标准踩踏区域;
18.坐标集获取模块,用于根据标准踩踏区域在数据库中匹配得到指示坐标集,所述指示坐标集包含多个显示灯的坐标;
19.显示控制模块,用于根据指示坐标集控制多个对应的显示灯闪烁以在踏板表面标示出相应的踏板区域。
20.通过采用上述技术方案,在极限滑板车的踏板分布安装有多个压力传感器,人员使用极限滑板车进行练习一个动作时,感应到人员在动作全程踩踏于踏板上的各位置的压力值,处理器根据动作全程各位置的压力值生成每个第一预设位置的压力变化速率曲线,然后在动作集中匹配到多个似然动作,因人员的练习动作不标准,且会存在失败的情况,因此选择出多个似然动作,然后在通过角度探测装置在动作全程中获取到的前轮的转动角度信息,而得到的角度变化曲线,在多个似然动作中筛选出最为适配的动作,然后根据用户的踩踏脚以及脚的尺码,匹配最为合适的标准踩踏区域,通过显示控制模块,在踏板上通过显示灯闪烁的方式标识出相应的踏板区域,以供人员练习相应动作时参考踩踏位置,进而提高练习成功率。
21.本技术在一较佳示例中可以进一步配置为:所述处理器还包括接收模块,所述接收模块用于响应于启动信号,处理器开始接收来自各压力传感器的压力值,并开始接收来自角度探测装置的前轮转动角度信息;
22.以及,用于响应于停止信号,处理器停止接收来自各压力传感器的压力值,以及停止接收来自角度探测装置的前轮转动角度信息。
23.通过采用上述技术方案,实现触发式处理,降低能耗。
24.本技术在一较佳示例中可以进一步配置为:所述压力传感器感应到超过预设变化值的压力变化值时,发送启动信号给处理器。
25.通过采用上述技术方案,压力变化值以反映人员在进行动作练习或展示开始瞬间通过脚施加给踏板的瞬间压力增量,进而反映出人员接下来进行的是动作练习或展示。
26.本技术在一较佳示例中可以进一步配置为:还包括分贝检测传感器,所述分贝检测传感器在检测到大于预设分贝的声音时,发送停止信号给处理器。
27.通过采用上述技术方案,预设分贝反映人员进行动作练习或展示后,极限滑板车落于地面产生的碰撞声,反映出动作的结束,实现触发式处理,降低能耗,并且保证动作全程获取的完整性。
28.本技术在一较佳示例中可以进一步配置为:所述显示灯呈弧形条状,所述显示灯与至少一个标准踩踏区域所对应的踏板区域的部分轮廓契合。
29.通过采用上述技术方案,能够通过少量的显示灯,还能更为恰当地表征出相应的踩踏区域,高效节能。
30.本技术在一较佳示例中可以进一步配置为:所述指示坐标集包含两个显示灯的坐标。
31.本技术在一较佳示例中可以进一步配置为:所述动作集中预先存储有多个第一预设位置的预设压力变化速率曲线与多个动作的映射关系;所述第一匹配模块包括:
32.计算单元,用于计算每个动作所对应的多个第一预设位置的预设压力变化速率曲
线中与任一多个第一预设位置的压力变化速率曲线的拟合度超过预设拟合度的数量占比;
33.似然动作生成单元,用于在所述数量占比超过预设预设占比的情况下,将动作作为似然动作。
34.本技术在一较佳示例中可以进一步配置为:所述脚参数获取模块包括:
35.筛选单元,用于筛选出多个感应到超过预设阈值的压力值的压力传感器所在预设位置的坐标;
36.踩踏脚判断单元,用于根据多个感应到超过预设阈值的压力值的压力传感器所在预设位置的坐标的分布方向,判断用户的踩踏脚为左脚还是右脚;
37.脚尺码判断单元,用于根据多个感应到超过预设阈值的压力值的压力传感器所在预设位置的坐标的分布外轮廓,判断用户的脚尺码。
38.通过采用上述技术方案,预设阈值是预先设定的,其表征用户的脚踩踏于该位置;因此通过多个感应到超过预设阈值的压力值的压力传感器所在预设位置,即可表征用户脚踩在踏板上的各位置,进而映射得到模型中各对应的坐标,然后根据该些坐标的分布方向,进而能够得知用户脚的长度方向,结合踏板的长度方向,进而能够判断出用户的踩踏脚为左脚还是右脚;通过该些坐标的外轮廓,可以反应出用户的鞋底大致形状,进而能够在预先存储的尺码查询表中查询得到对应的脚尺码。
39.本技术在一较佳示例中可以进一步配置为:所述角度探测装置包括微处理器和沿踏板宽度方向排列安装在踏板前端的多个红外感应器;
40.多个红外感应器用于沿踏板长度方向向前发射红外线并接收反射回来的红外线,所述红外感应器在接收到反射回来的红外线时,发送一次感应信号给微处理器;
41.微处理器用于在接受到感应信号时,根据感应信号生成转动角度信息。
42.通过采用上述技术方案,当前轮转动时,遮挡多个红外感应器中至少部分的红外感应器,进而该部分红外感应器接收到反射回来的红外线,则该部分红外感应器发送一次感应信号给微处理器;红外感应器被配置为每隔预设间隔检测一次,例如每0.5s间隔检测一次或发射一次红外线;根据每次发送感应信号的红外感应器的不同,进而能对应前轮不同转动角度的状态,实现对应的转动角度信息的获取。
43.综上所述,本技术包括以下至少一种有益技术效果:
44.1、在极限滑板车的踏板分布安装有多个压力传感器,人员使用极限滑板车进行练习一个动作时,感应到人员在动作全程踩踏于踏板上的各位置的压力值,处理器根据动作全程各位置的压力值生成每个第一预设位置的压力变化速率曲线,然后在动作集中匹配到多个似然动作,因人员的练习动作不标准,且会存在失败的情况,因此选择出多个似然动作,然后在通过角度探测装置在动作全程中获取到的前轮的转动角度信息,而得到的角度变化曲线,在多个似然动作中筛选出最为适配的动作,然后根据用户的踩踏脚以及脚的尺码,匹配最为合适的标准踩踏区域,通过显示控制模块,在踏板上通过显示灯闪烁的方式标识出相应的踏板区域,以供人员练习相应动作时参考踩踏位置,进而提高练习成功率;
45.2、预设阈值是预先设定的,其表征用户的脚踩踏于该位置;因此通过多个感应到超过预设阈值的压力值的压力传感器所在预设位置,即可表征用户脚踩在踏板上的各位置,进而映射得到模型中各对应的坐标,然后根据该些坐标的分布方向,进而能够得知用户脚的长度方向,结合踏板的长度方向,进而能够判断出用户的踩踏脚为左脚还是右脚;通过
该些坐标的外轮廓,可以反应出用户的鞋底大致形状,进而能够在预先存储的尺码查询表中查询得到对应的脚尺码;
46.3、当前轮转动时,遮挡多个红外感应器中至少部分的红外感应器,进而该部分红外感应器接收到反射回来的红外线,则该部分红外感应器发送一次感应信号给微处理器;红外感应器被配置为每隔预设间隔检测一次,例如每0.5s间隔检测一次或发射一次红外线;根据每次发送感应信号的红外感应器的不同,进而能对应前轮不同转动角度的状态,实现对应的转动角度信息的获取。
附图说明
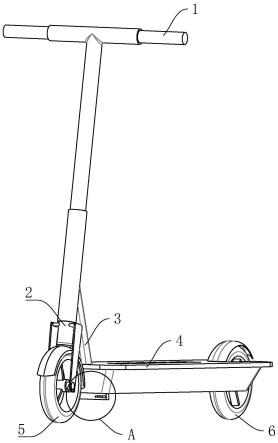
47.图1是本技术一实施例中极限滑板车的结构示意图;
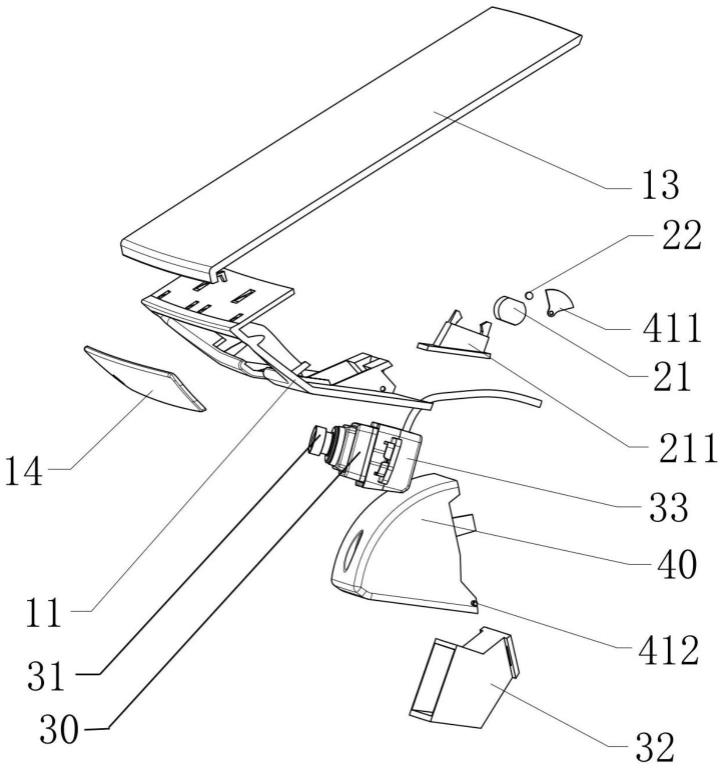
48.图2是图1中a部分的放大示意图;
49.图3是本技术一实施例中极限滑板车的踏板表面示意图;
50.图4是本技术一实施例中极限滑板车的踏板表面两个显示灯对应标准踩踏区域的踏板区域示意图;
51.图5是本技术一实施例中极限滑板车的踏板表面两个显示灯对应标准踩踏区域的另一踩踏脚的踏板区域示意图;
52.图6是本技术一实施例中极限滑板车的各模块连接示意图;
53.图7是本技术另一实施例中极限滑板车的各模块连接示意图。
54.附图说明:1、车把;2、前叉;3、连接架;4、踏板;5、前轮;6、后轮;7、红外感应器;8、显示灯。
具体实施方式
55.以下结合附图对本技术的示范性实施例做出说明,其中包括本技术实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本技术的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
56.需要说明的是,本发明中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本公开的实施例能够以除了在这里图示或描述的那些以外的顺序实施。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。
57.另外,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,如无特殊说明,一般表示前后关联对象是一种“或”的关系。
58.图1是本技术一实施例中极限滑板车的结构示意图,如图1所示,该极限滑板车,包括车把1、前叉2、连接架3和踏板4,其中,车把1和前叉2连接,前叉2和连接架3的一端连接,连接架3的另一端和踏板4一体成型连接,沿踏板4的长度方向,踏板4的后端设置有用于容置后轮6的容置槽。
59.可以理解的是,容置槽用于提供一个容置后轮6的空间,后轮6可以在该空间内转动。前叉2的下端用于连接前轮5,踏板4的前端可以与连接架3的另一端连接。
60.踏板4上分布有多个压力传感器,多个压力传感器分布于踏板4上各第一预设位置,压力传感器用于采集自身所在第一预设位置的压力值;踏板4表面嵌设安装有多个显示灯8,多个显示灯8嵌设于踏板4表面各第二预设位置,在一实施例中,显示灯8呈弧形条状,即,以踏板4的俯视角度看,踏板4表面的各显示灯8均呈矩形条状,极具美感。
61.结合图2,踏板4前端设有角度探测装置,用于采集前轮5的转动角度信息;具体地,角度探测装置包括微处理器和沿踏板4宽度方向排列安装在踏板4前端的多个红外感应器7;当前轮5的方向与踏板4长度方向一致时,即前轮5存在一径向与踏板4长度方向相同,多个红外感应器7位于前轮5的同一轮面侧;多个红外感应器7用于沿踏板4长度方向向前发射红外线并接收反射回来的红外线,红外感应器7在接收到反射回来的红外线时,发送一次感应信号给微处理器;微处理器用于在接受到感应信号时,根据感应信号生成转动角度信息。具体地,当前轮5转动时,遮挡多个红外感应器7中至少部分的红外感应器7,进而该部分红外感应器7接收到反射回来的红外线,则该部分红外感应器7发送一次感应信号给微处理器;红外感应器7被配置为每隔预设间隔检测一次,例如每0.5s间隔检测一次或发射一次红外线;根据每次发送感应信号的红外感应器7的不同,进而能对应前轮5不同转动角度的状态,实现对应的转动角度信息的获取。
62.结合图6和图7,极限滑板车还包括处理器,处理器可以内置于踏板4内,或者安装于前叉2部分,处理器内置有踏板4模型,踏板4模型内各坐标一一对应于踏板4各位置,可以理解的是,各第一预设位置、各第二预设位置均在踏板4模型内具有相应的坐标;处理器包括:接收模块、压力变化速率曲线生成模块、第一匹配模块、角度变化曲线生成模块、筛选模块、脚参数获取模块、第二匹配模块、坐标集获取模块和显示控制模块,各模块之间通讯连接,具体地,采用有线连接或无线通讯的方式,有线连接传输更快但需要布线,在一实施例中,优选用无线通讯的方式,例如lora技术、【wifi/ieee 802.11】协议、【zigbee/802.15.4】协议、【thread/ieee 802.15.4】、【z-wave】协议等实现通讯。
63.接收模块用于响应于启动信号,处理器开始接收来自各压力传感器的压力值,并开始接收来自角度探测装置的前轮5转动角度信息;
64.以及,用于响应于停止信号,处理器停止接收来自各压力传感器的压力值,以及停止接收来自角度探测装置的前轮5转动角度信息。
65.其中,启动信号是由压力传感器发送的,例如,压力传感器感应到超过预设变化值的压力变化值时,发送启动信号给处理器;停止信号是由安装在踏板4底部的分贝检测传感器发送的,分贝检测传感器在检测到大于预设分贝的声音时,发送停止信号给处理器;其中,预设变化值和预设分贝均为预先设定,压力变化值以反映人员在进行动作练习或展示开始瞬间通过脚施加给踏板4的瞬间压力增量,进而反映出人员接下来进行的是动作练习或展示;预设分贝反映人员进行动作练习或展示后,极限滑板车落于地面产生的碰撞声,反映出动作的结束。
66.处理器接收到启动信号和停止信号之间的时间跨度被视为第一时间跨度;压力变化速率曲线生成模块用于根据接收到的各压力传感器的压力值生成第一时间跨度内每个第一预设位置的压力变化速率曲线,例如,踏板4安装有10个压力传感器,则压力变化速率曲线生成模块根据第一时间跨度内接收到的各压力传感器发来的压力值,生成各压力传感器对应的压力变化速率曲线,即为每个第一预设位置的压力变化速率曲线;
67.第一匹配模块用于根据每个第一预设位置的压力变化速率曲线在动作集中匹配得到多个似然动作;
68.具体地,动作集中预先存储有多个第一预设位置的预设压力变化速率曲线与多个动作的映射关系,以及存储有多个动作与前轮5的预设转动角度变化曲线,动作集中的动作具体包括下述动作:脚跟翻(heelflip)、空中转体(body varial)、双脚带板起跳(ollie)、外跳转(frontside 180ollie)、内跳转(backside 180ollie)、倒板(pop shoveit)、踢翻(kickflip)、脚跟翻(heelflip)、cabalero等等,每个动作对应映射有多个第一预设位置的预设压力变化速率曲线,多个第一预设位置的预设压力变化速率曲线,是出厂配置的,即通过专业人员完成相应动作录制的多个第一预设位置的压力变化速率曲线,作为预设压力变化速率曲线,也可以通过专业人员多次完成相应动作录制的多组多个第一预设位置的压力变化速率曲线,相同第一预设位置的多组压力变化曲线进行拟合得到该位置的预设压力变化速率曲线;同样的,每个动作所对应的前轮5的预设转动角度变化曲线也是通过上述方式获得。
69.第一匹配模块包括计算单元和似然动作生成单元,其中计算单元用于计算每个动作所对应的多个第一预设位置的预设压力变化速率曲线中与任一多个第一预设位置的压力变化速率曲线的拟合度超过预设拟合度的数量占比;
70.例如,分析某一动作所对应的每个第一预设位置的预设压力变化速率曲线和每个第一预设位置的压力变化速率曲线的拟合度,当该动作所对应的一条预设压力变化速率曲线与任一多个第一预设位置的压力变化速率曲线的拟合度超过预设拟合度,则计数1;如此统计该动作所对应的所有超过预设拟合度的预设压力变化速率曲线的数量,然后计算该数量与该动作所对应的所有预设压力变化速率曲线的总数比值作为数量占比。
71.似然动作生成单元用于在数量占比超过预设预设占比的情况下,将动作作为似然动作,通过该方式,实现多个似然动作的获取。
72.角度变化曲线生成模块用于根据接收到的前轮5转动角度信息生成第一时间跨度内的角度变化曲线;具体地,通过前述在第一时间跨度内接收到的每次的转动角度信息,能够拟合成第一时间跨度内的角度变化曲线。
73.筛选模块用于根据角度变化曲线在多个似然动作中择出最适配动作,即将多个似然动作所关联映射的预设转动角度变化曲线与角度变化曲线进行拟合,进而将其中多个似然动作中关联映射的预设转动角度变化曲线与角度变化曲线的拟合度最高的似然动作作为最适配动作。
74.脚参数获取模块用于获取用户的踩踏脚以及脚尺码,具体地,脚参数获取模块包括:
75.筛选单元,用于筛选出多个感应到超过预设阈值的压力值的压力传感器所在预设位置的坐标;
76.踩踏脚判断单元,用于根据多个感应到超过预设阈值的压力值的压力传感器所在预设位置的坐标的分布方向,判断用户的踩踏脚为左脚还是右脚;
77.脚尺码判断单元,用于根据多个感应到超过预设阈值的压力值的压力传感器所在预设位置的坐标的分布外轮廓,判断用户的脚尺码。
78.可以理解的是,预设阈值是预先设定的,其表征用户的脚踩踏于该位置;因此通过
多个感应到超过预设阈值的压力值的压力传感器所在预设位置,即可表征用户脚踩在踏板4上的各位置,进而映射得到模型中各对应的坐标,然后根据该些坐标的分布方向,进而能够得知用户脚的长度方向,结合踏板4的长度方向,进而能够判断出用户的踩踏脚为左脚还是右脚。
79.而通过该些坐标的外轮廓,可以反应出用户的鞋底大致形状,进而能够在预先存储的尺码查询表中查询得到对应的脚尺码;
80.尺码查询表是预先设置的用于查询脚尺码的表格。即,将脚尺码作为键值对中的值,通过表格进行预先记录,后续,只需要使用键值对中的键来查找相应脚尺码即可,尺码查询表中,预先记录的是外轮廓和脚尺码之间的对应关系。该种情况下,约束输入数据即为键值对中的键,脚尺码即为键值对中的值。
81.第二匹配模块用于根据用户的踩踏脚、脚尺码和最适配动作在数据库中匹配得到踏板4模型内的标准踩踏区域;
82.具体地,数据库中存储有踩踏脚、脚尺码和动作三者跟标准踩踏区域之间的对应关系,通过前述获取到用户的踩踏脚、脚尺码和动作后,能够直接匹配到标准踩踏区域,标准踩踏区域表征用户将脚踩踏于踏板4上对应的踏板4区域时,姿势更为正确,或者成功率更高。该对应的标准踩踏区域通过大量用户以及专业人员的训练、使用数据获取,具有较高得到参考价值。
83.坐标集获取模块用于根据标准踩踏区域在数据库中匹配得到指示坐标集,指示坐标集包含多个显示灯8的坐标;结合图3、图4和图5,在一实施例中,指示坐标集包含两个显示灯8的坐标,且,显示灯8形状与至少一个标准踩踏区域所对应的踏板4区域的部分轮廓契合,并且,两个显示灯8的坐标分别位于标准踩踏区域所对应的踏板4区域的相对两侧。显示控制模块用于根据指示坐标集控制多个对应的显示灯8闪烁以在踏板4表面标示出相应的踏板4区域。进而,通过两个与标准踩踏区域所对应的踏板4区域的部分轮廓契合的显示灯8,能够精准地标识出用户的踩踏脚所应该踩踏的踏板4区域,对后续训练和练习提供指导作用,不易造成伤害,或者成功率高,姿势更为正确。此处描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、专用asic(专用集成电路)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
84.这些计算程序(也称作程序、软件、软件应用、或者代码)包括可编程处理器的机器指令,并且可以利用高级过程和/或面向对象的编程语言、和/或汇编/机器语言来实施这些计算程序。如本文使用的,术语“机器可读介质”和“计算机可读介质”指的是用于将机器指令和/或数据提供给可编程处理器的任何计算机程序产品、设备、和/或装置(例如,磁盘、光盘、存储器、可编程逻辑装置(pld)),包括,接收作为机器可读信号的机器指令的机器可读介质。术语“机器可读信号”指的是用于将机器指令和/或数据提供给可编程处理器的任何信号。
85.为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机
具有:用于向用户显示信息的显示装置(例如,crt(阴极射线管)或者lcd(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。
86.可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(lan)、广域网(wan)和互联网。
87.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发申请中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本技术公开的技术方案所期望的结果,本文在此不进行限制。
88.上述具体实施方式,并不构成对本技术保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本技术的精神和原则之内所作的修改、等同替换和改进等,均应包含在本技术保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。