1.本发明涉及农产品检测领域,具体是一种用于田间作物检测的行走装置。
背景技术:
2.研制番茄成熟度检测机器具有很大的发展前景。通过对田间机器人的调研发现,目前行走机器人主要的行进方式为车轮式和履带式。其中车轮式行进具有转向灵活、速度快、效率高、运动噪音低等优点。但车轮的抓地力不强,对于光滑地面易出现打滑现象。并且田间地形复杂,由于轮式机器人地形适应能力差,使其具有运作不平稳,越障能力差的缺陷。履带式行进因其履带形状可变且抓地力强,使其具有越障能力好,地形适应能力强的优点。但由于履带内部零件较多,并且传动主要依靠内部轮转动,造成其电机驱动功率高、运作噪音大,运动速度低。
技术实现要素:
3.本发明的目的在于提供一种用于田间作物检测的行走装置以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种用于田间作物检测的行走装置,行走装置包括车本体,所述车本体包括主控制端、信号采集装置、激光测距传感器和行走机构,所述主控制端分别与所述信号采集装置、所述激光测距传感器、所述行走机构信号连接,所述行走机构包括关节腿和多个舵机,所述关节腿两端分别设有舵机固定槽,所述舵机分别安装于所述舵机固定槽内侧,所述舵机通过传动轴分别连接有转换关节和机械脚,靠近所述机械脚端的舵机固定槽固定连接有电机固定装置,所述电机固定装置内侧固定安装有电机,所述电机的驱动轴连接有车轮,所述车轮与机械脚分别位于所述关节腿两侧,所述车本体上设有多个与所述行走机构位置相对应的舵机固定架,所述舵机固定架上分别安装有车身舵机,所述车身舵机通过舵机传动轴与所述转换关节连接。
6.作为发明进一步的方案:所述关节腿、舵机固定槽与电机固定装置位于同一轴径,所述关节腿与舵机固定槽为一体结构,所述行走机构至少有四个且对称设置在所述车本体两侧。
7.作为发明进一步的方案:所述信号采集装置包括双摇杆机构和位于所述双摇杆机构末端并与所述双摇杆机构同步运动的摄像头;所述双摇杆机构包括机械臂、机械臂支撑架和铰链,所述双摇杆机构通过转盘转动连接在所述车本体上;所述机械臂包括机械臂长杆、第一机械臂短杆和第二机械臂短杆,所述机械支撑机构包括左机械臂支撑杆、右机械臂支撑杆、第一机械臂支架、第二机械臂支架、第一机械臂小支架和第二机械臂小支架。
8.作为发明进一步的方案:所述转盘固设有用于连接所述双摇杆机构的左基座和右基座,所述左基座和右基座对称设置且之间固设有支架座,所述左机械臂支撑杆的一端通过所述第一机械臂小支架旋转铰接在左基座下侧,所述左机械臂支撑杆的另一端旋转铰接
在所述机械臂长杆的一端;所述右机械臂支撑杆旋转铰接在所述右基座上侧;所述第一机械臂支架为h型结构,所述第一机械臂支架h型结构的下端一侧与所述右基座连接,所述第一机械臂支架h型结构的下端另一侧旋转铰接在所述支架座上,所述第一机械臂支架h型结构的上端一侧旋转铰接有所述机械臂长杆,所述第一机械臂支架h型结构的上端的另一侧依次连接铰链和第二机械臂短杆,所述铰链的另外两端分别旋转铰接有所述右机械臂支撑杆和第一机械臂短杆;所述第二机械臂短杆和所述机械臂长杆左右平行设置且通过第二机械臂支架固定连接;所述第二机械臂短杆与所述第一机械臂短杆通过第二机械臂小支架旋转铰接;所述第一机械臂短杆与所述第二机械臂短杆长度相同且上下平行设置。
9.作为发明进一步的方案:所述左基座和所述右基座外侧通过舵机固定架分别安装有左舵机和右舵机,所述左舵机通过传动轴连接第一机械臂支架,所述右舵机通过传动轴连接第一机械臂小支架。
10.作为发明进一步的方案:所述转盘下方通过传动轴连接有用于控制所述转盘旋转的下舵机,所述转盘和所述下舵机之间固设有转盘盖。
11.作为发明进一步的方案:所述摄像头固定安装在所述第一机械臂短杆和所述机械臂长杆的末端并跟随所述机械臂在右舵机、左舵机、下舵机的控制下实现摄像头多自由度的运动。
12.作为发明进一步的方案:所述车本体外侧设有与所述主控制端的信号接收端连接的第一按键和第二按键,所述第一按键用于控制所述行走装置切换至足式行走,所述第二按键用于控制行走装置切换至轮式行走。
13.与现有技术相比,本发明的有益效果是:
14.(1)行走速度快、适用于多地形:执行装置的行走方式分为轮式行走和足式行走。轮式行走时,通过判断激光测距传感器接收信号的差别,自动改变关节腿与机械脚之间的角度,进而辅助机器人进行坡度爬升和台阶攀登作业。此外,依据不同地形通过按键自行调节轮式行走和足式行走,轮式行走使执行装置行进速度提高,足式行走使该执行装置适应于多地形行进,在实际应用过程中节约了人力成本,提高了工作效率。
15.(2)摄像头多自由度运动,图像采集全面:信号采集装置采用双摇杆机构,通过舵机改变双摇杆结构中各零件的相对角度,进而实现摄像头多自由度运动。
附图说明
16.图1为本发明行走机构的结构示意图;
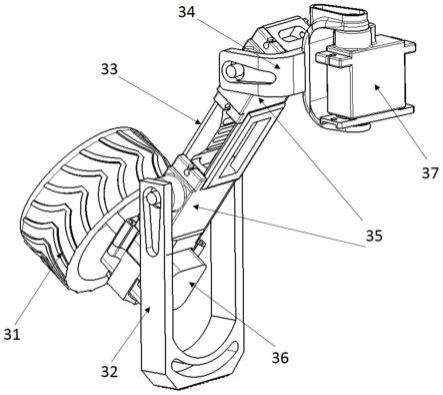
17.图2为本发明关节腿的结构示意图
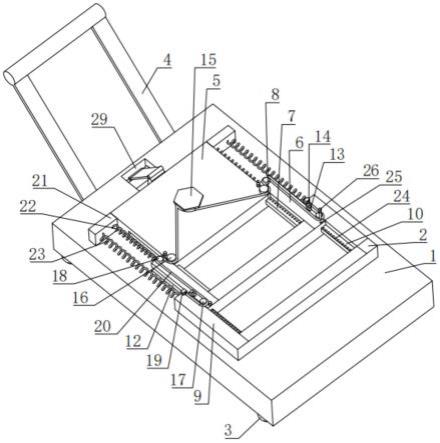
18.图3为本发明的整体结构示意图;
19.图4为本发明双摇杆机构的结构示意图。
20.图中:1-车本体、2-信号采集装置、20-铰链、21-机械臂长杆、22-第一机械臂短杆、 23-第二机械臂短杆、24-左机械臂支撑杆、25-右机械臂支撑杆、26-第一机械臂支架、27
‑ꢀ
第二机械臂支架、28-第一机械臂小支架、29-第二机械臂小支架、3-行走机构、31-车轮、 32-机械脚、33-关节腿、34-转换关节、35-舵机、351-舵机固定槽、36-电机、361-电机固定装置、37-车身舵机、4-转盘、41-左基座、411-左舵机、42-右基座、421-右舵机、43-支架座、44-下舵机、45-转盘盖。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.请参阅图1-图3,本发明实施例中,行走装置包括车本体1,所述车本体1包括主控制端、信号采集装置2、激光测距传感器和行走机构3,所述主控制端分别与所述信号采集装置2、所述激光测距传感器、所述行走机构信号连接,其特征在于,所述行走机构2 包括关节腿33和多个舵机35,所述关节腿33两端分别设有舵机固定槽351,所述舵机35 安装于所述舵机固定槽351内侧,所述舵机35通过传动轴分别连接有转换关节34和机械脚32,靠近所述机械脚32端的舵机固定槽351固定连接有电机固定装置361,所述电机固定装置361内侧固定安装有电机36,所述电机36的驱动轴连接有车轮31,所述车轮(31) 与机械脚32分别位于所述关节腿33两侧,所述车本体1上设有多个与所述行走机构3位置相对应的舵机固定架,所述舵机固定架上分别安装有车身舵机37,所述车身舵机37通过舵机传动轴与所述转换关节34连接。所述主控制端的信号输入端分别连接所述信号采集装置2的信号输出端和所述激光测距传感器的信号输出端,所述主控制端的信号输出端分别连接所述信号采集装置2的信号输入端和所述行走机构3中安装舵机35的信号输入端;所述转换关节34与车本体1连接处的舵机35通过传动轴控制所述转换关节34前后转动,所述转换关节34前后转动带动所述行走机构3前后运动,控制一个自由度;所述转换关节34与关节腿33连接处的舵机35通过传动轴控制行走机构3的上下运动,控制一个自由度,用于进行台阶及坡度的攀升;所述关节腿33与机械脚32连接处的舵机35 通过传动轴控制机械脚32的旋转运动,控制一个自由度,用于放下机械脚32起到支撑作用,由轮式行走切换至足式行走,所述机械脚32为u型结构,切换至足式行走时站立更平稳,所述机械脚32可在关节腿33一侧180
°
转动。
23.进一步的,所述关节腿33、舵机固定槽351与电机固定装置361位于同一轴径,所述关节腿33与舵机固定槽351为一体结构,所述行走机构3至少有四个且对称设置在所述车本体1两侧。四足式行走有利于仿生机械整体控制,使其具有更好的稳定性。
24.进一步的,如图4所示,所述信号采集装置2包括双摇杆机构和位于所述双摇杆机构末端并与所述双摇杆机构同步运动的摄像头;所述双摇杆机构包括机械臂、机械臂支撑架和铰链20,所述双摇杆机构通过转盘4转动连接在所述车本体1上;所述机械臂包括机械臂长杆21、第一机械臂短杆22和第二机械臂短杆23,所述机械支撑机构包括左机械臂支撑杆24、右机械臂支撑杆25、第一机械臂支架26、第二机械臂支架27、第一机械臂小支架28和第二机械臂小支架29。
25.进一步的,如图4所示,所述转盘4固设有用于连接所述双摇杆机构的左基座41和右基座42,所述左基座41和右基座42对称设置且之间固设有支架座43,所述左机械臂支撑杆24的一端通过第一机械臂小支架28旋转铰接在左基座41下侧,所述左机械臂支撑杆24的另一端旋转铰接在所述机械臂长杆21的一端;所述右机械臂支撑杆25旋转铰接在所述右基座42上侧;所述第一机械臂支架26为h型结构,所述第一机械臂支架26h型结构的下端一侧与所述右基座42连接,所述第一机械臂支架26h型结构的下端另一侧旋转铰接在所述支架座43上,所述第一机械臂支架26h型结构的上端一侧旋转铰接有所述机械臂长杆21,所述第
一机械臂支架26h型结构的上端的另一侧依次连接铰链20和第二机械臂短杆23,所述铰链20的另外两端分别旋转铰接有所述右机械臂支撑杆25和第一机械臂短杆22;所述第二机械臂短杆23和所述机械臂长杆21左右平行设置且通过第二机械臂支架27固定连接;所述第二机械臂短杆23与所述第一机械臂短杆22通过第二机械臂小支架29旋转铰接;所述第一机械臂短杆22与所述第二机械臂短杆23长度相同且上下平行设置。
26.进一步的,所述左基座41和所述右基座42外侧通过舵机固定架分别安装有左舵机411 和右舵机421,所述左舵机411通过传动轴连接第一机械臂支架26,所述右舵机421通过传动轴连接第一机械臂小支架28。所述左舵机411通过传动轴控制第一机械臂小支架28 带动左机械臂支撑杆24上下运动,从而带动机械臂的上下运动,控制一个自由度;所述右舵机421通过传动轴控制第一机械臂支架26前后运动,从而带动机械臂及机械臂支撑架前后运动,控制一个自由度。
27.进一步的,所述转盘4下方通过传动轴连接有用于控制所述转盘4旋转的下舵机44,所述转盘4和所述下舵机44之间固设有转盘盖45。所述下舵机44通过传动轴控制转盘4 旋转运动,所述转盘4旋转带动双摇杆机构旋转运动,控制一个自由度。
28.进一步的,所述摄像头固定安装在所述第一机械臂短杆22和所述机械臂长杆21的末端并跟随所述机械臂在右舵机421、左舵机411、下舵机44的控制下分别实现摄像头前后、上下及左右的多自由度的运动。
29.进一步的,所述车本体外侧设有与所述主控制端的信号接收端连接的第一按键和第二按键,所述第一按键用于控制所述行走装置切换至足式行走,所述第二按键用于控制行走装置切换至轮式行走。当田间地形复杂时,采用第一按键的足式行走机构,避免了轮式行走机构的打滑及越障能力差的问题,当田间地形平整,采用第二按键的轮式行走机构,运动速度快,工作效率更高,行走过程中若激光测距传感器检测到前端有台阶或者坡度,主控制端通过接收激光传感器传递的信号,通过自适应算法调整机械脚32与关节腿33的角度,并通过舵机35控制机械脚32放下起到支撑作用,前端两足攀升台阶,且加大电机36 动力进行爬升坡度与台阶,在坡度与台阶跨越后继续轮式行走。
30.本发明在使用过程中,行进及检测过程的具体实施方式如下:
31.步骤s1:采集多时期,多角度的番茄图片构建数据集,对收集到的番农作物图像进行不同成熟度及病虫害的标记并分类得到待训练数据集;
32.步骤s2:构建yolov—5网络模型对待训练数据集进行参数训练,通过增广训练样本来提高网络的泛化性,同时将骨干网络中所有的3
×
3卷积核替换成卷积核组,训练后的模型即可用于对农作物图像特征进行检测;
33.步骤s3:将摄像头供电,准备采集行进过程的图像;
34.步骤s4:设定行进路线,通过仿生机械的轮式行走机构,将装置按照规划路线行进,按下按键2,机械腿脚收起,减少运动过程中与地面的摩擦力;
35.步骤s5:行走过程中若激光测距传感器检测到前端有台阶或者坡度,主控制端通过接收激光测距传感器传递的信号,通过自适应算法调整机械脚与关节腿角度,并通过舵机控制机械脚放下起到支撑作用,前端两足攀升台阶,且加大电机38动力进行爬升坡度与台阶,在坡度与台阶跨越后继续轮式行走;
36.步骤s6:主控制端对信号采集装置2采集到的图像进行实时检测与统计,输入进步
骤 s2训练后的模型中得出结果。
37.本发明结构新颖,运行稳定,本发明在使用时具有以下优点:
38.(1)行走速度快、适用于多地形:执行装置的行走方式分为轮式行走和足式行走。轮式行走时,通过判断激光测距传感器接收信号的差别,自动改变关节腿与机械脚之间的角度,进而辅助机器人进行坡度爬升和台阶攀登作业。此外,依据不同地形通过按键自行调节轮式行走和足式行走,轮式行走使执行装置行进速度提高,足式行走使该执行装置适应于多地形行进,在实际应用过程中节约了人力成本,提高了工作效率。
39.(2)摄像头多自由度运动,图像采集全面:信号采集装置采用双摇杆机构,通过舵机改变双摇杆结构中各零件的相对角度,进而实现摄像头多自由度运动。
40.虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
41.故以上所述仅为本技术的较佳实施例,并非用来限定本技术的实施范围;即凡依本技术的权利要求范围所做的各种等同变换,均为本技术权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。