1.本发明涉及一种智能机器人,特别是一种越障型智能机器人,属于智能机器人技术领域。
背景技术:
2.随着智能化设备的发展与普及,智能机器人原来越多地应用到我们的生活领域以及生产领域中。目前,对于可移动的智能机器人,现有技术已经可以比较好地实现智能机器人的无人驱动,使智能机器人能够在特定区域内自行规划路径并进行行走,而且通过视觉识别系统结合雷达传感器等器件,可以实现障碍物识别并对障碍物进行避障绕行。但是在一些复杂的场景区域内,尤其是在工业生产环境下,很多障碍物比较难以进行绕行,而且很多的障碍物高度其实并不高,因此有必要设计一种能够越过这些难以绕行且高度较低的障碍物的智能机器人。
技术实现要素:
3.本发明所要解决的技术问题是提供一种越障型智能机器人,其能够直接越过难以绕行且高度较低的障碍物。
4.为解决上述技术问题,本发明所采用的技术方案是:一种越障型智能机器人,其特征在于:包含智能机器人本体、第一驱动轮、第二驱动轮、第一支承轮和第二支承轮,第一驱动轮通过竖直升降机构设置在智能机器人本体一侧,第二驱动轮通过竖直升降机构设置在智能机器人本体的另一侧,第一支承轮设置在智能机器人本体底面前端,第二支承轮设置在智能机器人本体底面后端。
5.进一步地,所述智能机器人本体的前侧面的下端设置有第一障碍传感器和第二障碍传感器,第一障碍传感器位于智能机器人本体前侧面的下端边沿,第二障碍传感器位于第一障碍传感器的上方。
6.进一步地,所述第一驱动轮和第二驱动轮分别包含轮毂电机和轮体,轮体设置在轮毂电机上。
7.进一步地,所述竖直升降机构包含轮毂电机支架、第一连杆、第二连杆、升降支架和升降驱动机构,轮毂电机固定设置在轮毂电机支架上,轮毂电机支架和升降支架均沿竖直方向设置,第一连杆和第二连杆相互平行,第一连杆和第二连杆的一端分别铰接设置在轮毂电机支架上,第一连杆和第二连杆的另一端分别铰接设置在升降支架上,升降驱动机构一端铰接在升降支架上,升降驱动机构的另一端铰接在第二连杆上。
8.进一步地,所述升降驱动机构采用电动推杆。
9.进一步地,所述轮毂电机支架面向智能机器人本体的一侧的下端设置有第一铰座,轮毂电机支架面向智能机器人本体的一侧的上端设置有第二铰座,升降支架与轮毂电机支架相对的一侧的下端设置有第三铰座,升降支架与轮毂电机支架相对的一侧的上端设置有第四铰座,第一连杆的一端铰接在第一铰座上,第一连杆的另一端铰接在第三铰座上,
第二连杆的一端铰接在第二铰座上,第二连杆的另一端铰接在第四铰座上,升降支架与轮毂电机支架相对的一侧上设置有第五铰座,升降驱动机构的一端铰接在第五铰座上。
10.进一步地,所述升降支架面向智能机器人本体的一侧的上端设置有至少一根滑竿,智能机器人本体的底部开有与滑竿匹配的滑槽,滑竿滑动设置在滑槽内,第一驱动轮和第二驱动轮对应的滑竿交错设置在智能机器人本体的底部。
11.进一步地,所述第一驱动轮和第二驱动轮对应的滑竿相对的一侧设置有齿条结构,第一齿轮转动设置在智能机器人本体内并且第一齿轮分别与第一驱动轮和第二驱动轮对应的滑竿的齿条结构啮合。
12.进一步地,所述第一支承轮和第二支承轮分别包含支承轮轮体、支承轮活动支架、支承轮升降支架和升降驱动机构,支承轮轮体转动设置在支承轮活动支架的下端,支承轮活动支架的上端与支承轮升降支架的下端铰接并且支承轮活动支架与支承轮升降支架的铰轴上设置有扭簧,智能机器人本体下侧设置有供支承轮活动支架和支承轮升降支架升降的竖直通道,支承轮升降支架设置在升降驱动机构上由升降驱动机构驱动沿竖直通道升降,支承轮活动支架与支承轮升降支架的铰接处设置有放置支承轮活动支架向智能机器人本体前侧转动的限位板。
13.进一步地,所述升降驱动机构包含齿条、第二齿轮和齿轮驱动马达,齿条固定在支承轮升降支架上,第二齿轮设置在齿轮驱动马达的转轴上由齿轮驱动马达驱动旋转并且第二齿轮与齿条相互啮合。
14.本发明与现有技术相比,具有以下优点和效果:本发明以两个轮毂电机驱动主驱动轮,辅以两个支承轮进行智能机器人本体的平衡,遇到障碍物时,可以将智能机器人本体竖直抬高从而越过障碍物;两个支承轮可以进行折叠,从而在遇到障碍物时能够顺利通过,且支承轮也能够随着智能机器人本体的抬高而升降;本发明通过滑竿来保证两个驱动轮之间的轮距在智能机器人本体抬升时不变,且智能机器人本体始终能够保证处于中心位置,使越障更加的稳定。
附图说明
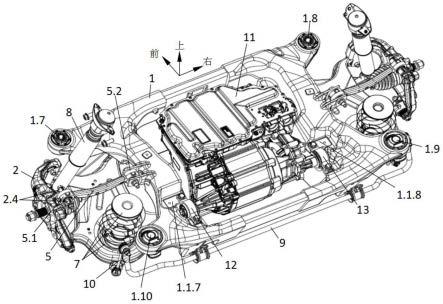
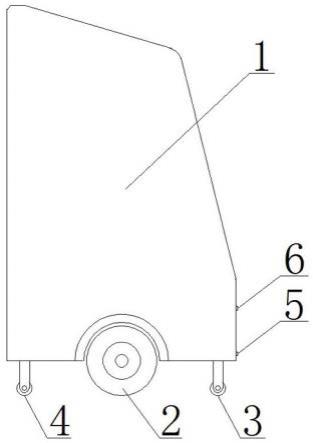
15.图1是本发明的一种越障型智能机器人的示意图。
16.图2是本发明的第一驱动轮和第二驱动轮的示意图。
17.图3是本发明的滑竿示意图。
18.图4是本发明的第一支承轮和第二支承轮的示意图。
具体实施方式
19.为了详细阐述本发明为达到预定技术目的而所采取的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清晰、完整地描述,显然,所描述的实施例仅仅是本发明的部分实施例,而不是全部的实施例,并且,在不付出创造性劳动的前提下,本发明的实施例中的技术手段或技术特征可以替换,下面将参考附图并结合实施例来详细说明本发明。
20.如图1所示,本发明的一种越障型智能机器人,包含智能机器人本体1、第一驱动轮2、第二驱动轮、第一支承轮3和第二支承轮4,第一驱动轮通过竖直升降机构设置在智能机
器人本体1一侧,第二驱动轮通过竖直升降机构设置在智能机器人本体1的另一侧,第一支承轮3设置在智能机器人本体1底面前端,第二支承轮4设置在智能机器人本体1底面后端。
21.智能机器人本体1的前侧面的下端设置有第一障碍传感器5和第二障碍传感器6,第一障碍传感器5位于智能机器人本体1前侧面的下端边沿,第二障碍传感器6位于第一障碍传感器5的上方。第一障碍传感器5和第二障碍传感器6采用光电测距传感器或者激光雷达,第一障碍传感器5用于检测智能机器人本体1的正前方是否有障碍物,第二障碍物传感器6则用于检测前方障碍物的高度是否超出最大限值。根据需要,可以设置多个第一障碍物传感器5或者第二障碍物传感器6,多个传感器水平排列在智能机器人本体1前侧从而对前侧范围进行全面的覆盖。
22.如图2所示,第一驱动轮2和第二驱动轮分别包含轮毂电机7和轮体8,轮体8设置在轮毂电机7上。两个驱动轮通过独立的轮毂电机进行驱动,可以实现智能机器人本体1的前进、后退、原地转向等动作。
23.竖直升降机构包含轮毂电机支架9、第一连杆10、第二连杆11、升降支架12和升降驱动机构13,轮毂电机7固定设置在轮毂电机支架9上,轮毂电机支架9和升降支架12均沿竖直方向设置,第一连杆10和第二连杆11相互平行,第一连杆10和第二连杆11的一端分别铰接设置在轮毂电机支架9上,第一连杆10和第二连杆11的另一端分别铰接设置在升降支架12上,升降驱动机构13一端铰接在升降支架12上,升降驱动机构13的另一端铰接在第二连杆11上。轮毂电机支架9、第一连杆10、第二连杆11和升降支架12构成了一个平行四连杆机构,可以保证智能机器人本体1沿着竖直方向进行升降。
24.优选地,升降驱动机构13采用电动推杆。轮毂电机支架9面向智能机器人本体1的一侧的下端设置有第一铰座14,轮毂电机支架9面向智能机器人本体1的一侧的上端设置有第二铰座15,升降支架12与轮毂电机支架9相对的一侧的下端设置有第三铰座16,升降支架12与轮毂电机支架9相对的一侧的上端设置有第四铰座17,第一连杆10的一端铰接在第一铰座14上,第一连杆10的另一端铰接在第三铰座16上,第二连杆11的一端铰接在第二铰座15上,第二连杆11的另一端铰接在第四铰座17上,升降支架12与轮毂电机支架9相对的一侧上设置有第五铰座18,升降驱动机构13的一端铰接在第五铰座18上。
25.如图3所示,升降支架12面向智能机器人本体1的一侧的上端设置有至少一根滑竿19,智能机器人本体1的底部开有与滑竿19匹配的滑槽,滑竿19滑动设置在滑槽内,第一驱动轮2和第二驱动轮对应的滑竿19交错设置在智能机器人本体1的底部。第一驱动轮2和第二驱动轮对应的滑竿19相对的一侧设置有齿条结构20,第一齿轮21转动设置在智能机器人本体1内并且第一齿轮21分别与第一驱动轮2和第二驱动轮对应的滑竿19的齿条结构20啮合。通过一个第一齿轮21同时与两个驱动轮的滑竿19啮合,可以保证两个驱动轮的滑竿可以在智能机器人本体的底部对称伸缩滑动,保证智能机器人本体1始终位于中心位置。
26.如图4所示,第一支承轮3和第二支承轮4分别包含支承轮轮体22、支承轮活动支架23、支承轮升降支架24和升降驱动机构,支承轮轮体22转动设置在支承轮活动支架23的下端,支承轮活动支架23的上端与支承轮升降支架24的下端铰接并且支承轮活动支架23与支承轮升降支架24的铰轴上设置有扭簧,智能机器人本体1下侧设置有供支承轮活动支架23和支承轮升降支架24升降的竖直通道,支承轮升降支架24设置在升降驱动机构上由升降驱动机构驱动沿竖直通道升降,支承轮活动支架23与支承轮升降支架24的铰接处设置有放置
支承轮活动支架23向智能机器人本体1前侧转动的限位板。当遇到障碍物时,智能机器人本体1随着竖直升降机构的驱动抬高,当抬高到智能机器人本体1的底面高于支承轮活动支架23和支承轮升降支架24的铰接位置时,遇到障碍物时,支承轮活动支架23触碰障碍物表面从而受到障碍物的挤压而沿着铰轴向后侧转动收起,从而越过障碍物,越过障碍后,支承轮活动支架23不受力,在扭簧的作用下恢复到竖直位置对智能机器人本体1进行支承。越障时,第一支承轮3先弯曲,第二支承轮4后弯曲,始终可以保证有一个支承轮3在起作用,而且弯曲的支承轮也支承在障碍物上侧,保证智能机器人本体1在越障时的稳定性。
27.升降驱动机构包含齿条25、第二齿轮26和齿轮驱动马达27,齿条25固定在支承轮升降支架24上,第二齿轮26设置在齿轮驱动马达27的转轴上由齿轮驱动马达27驱动旋转并且第二齿轮26与齿条25相互啮合。齿轮驱动马达27驱动第二齿轮26旋转,第二齿轮26带动齿条25沿竖直方向升降,从而实现了支承轮活动支架23、支承轮升降支架24在竖直通道内的升降。在智能机器人本体在竖直升降机构驱动升降时,齿轮驱动马达27驱动两个支承轮同步进行升降。
28.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。