1.本实用新型涉及移动小车技术领域,特别涉及一种转向梯形结构的驱动机构、转向装置及移动小车。
背景技术:
2.现如今,大部分车辆上均设置有转向装置以控制车轮转向,车轮转向通常采用基于阿克曼转向原理设计的转向梯形结构,并且一般通过曲柄连杆机构来驱动转向梯形结构变形。
3.目前,如图1所示,曲柄连杆机构的连杆1与转向梯形结构的转向横拉杆2连接,为保证横向驱动力和运动范围,连杆1与转向横拉杆2的连接位置会靠近其中一个外球头点,由于该连接位置不对中,会导致曲柄在控制转向时,曲柄转动的角度不能左右对称分布,产生左右转向速度不一致的情况。
技术实现要素:
4.本实用新型的主要目的是提出一种转向梯形结构的驱动机构,旨在解决目前车辆左右转向速度不一致的技术问题。
5.为实现上述目的,本实用新型提出一种转向梯形结构的驱动机构,该转向梯形结构的驱动机构包括:
6.摆臂,摆臂可在驱动下以一基点摆动,摆臂上开设有垂直于其摆动方向的滑槽;
7.滑柱,滑柱容置于滑槽中,并可在滑槽中滑动及转动,滑柱的一端穿过滑槽连接于转向梯形结构的转向横拉杆的中点处。
8.其中,滑柱被套设有套筒,套筒随滑柱滑动及转动。
9.其中,转向梯形结构的驱动机构还包括:
10.舵机,舵机用于驱动摆臂摆动。
11.其中,转向梯形结构的驱动机构还包括:
12.减速机构,减速机构的输入端与舵机连接,减速机构的输出端与摆臂连接。
13.其中,减速机构包括直齿轮副,直齿轮副包括第一直齿轮和与第一直齿轮相啮合的第二直齿轮;
14.第一直齿轮与舵机的输出轴传动连接,第二直齿轮与摆臂连接,并与摆臂同轴运动。
15.其中,第二直齿轮为扇形齿轮。
16.其中,减速机构还包括蜗轮蜗杆组件;
17.蜗轮蜗杆组件中的蜗杆与舵机的输出轴连接且同轴设置,蜗轮蜗杆组件中的蜗轮与第一直齿轮连接且同轴设置。
18.其中,减速机构还包括锥齿轮副,锥齿轮副包括第一锥齿轮和与第一锥齿轮相啮合的第二锥齿轮;
19.第一锥齿轮与舵机的输出轴连接且同轴设置,第二锥齿轮与第一直齿轮连接且同轴设置。
20.本实用新型还提出一种转向装置,该转向装置包括转向梯形结构和前述记载的转向梯形结构的驱动机构。
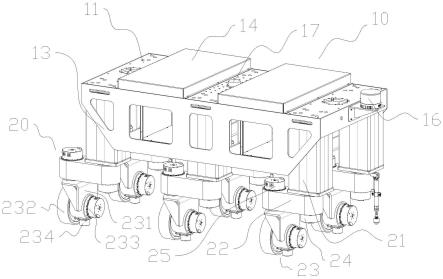
21.本实用新型还提出一种移动小车,该移动小车包括前述记载的转向装置。
22.本实用新型技术方案的转向梯形结构的驱动机构通过在摆臂上构造滑槽,将可在滑槽中滑动及转动的滑柱连接转向梯形结构的转向横拉杆,当摆臂摆动时,滑槽的内壁将驱使滑柱在滑槽中滑动并相对滑槽转动,滑柱进而带动转向横拉杆转动及横移,实现转向梯形结构的变形。其中,滑柱连接于转向横拉杆的中点处,摆臂对转向横拉杆的驱动位置居中,当摆臂摆动以驱动转向横拉杆转动及横移时,向左转向或向右转向,转向横拉杆的转动及横移的速度变化相同,从而使得车辆左右转向的转向速度一致。
附图说明
23.图1为现有技术中一转向装置的结构示意图;
24.图2为本实用新型一实施例中转向梯形结构及其驱动机构的结构示意图;
25.图3为图2实施例中转向梯形结构及其驱动机构在另一视角下的结构示意图;
26.图4为图2实施例中转向梯形结构及其驱动机构处于转向状态的结构示意图。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的方案进行清楚完整的描述,显然,所描述的实施例仅是本实用新型中的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
29.还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
30.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
31.现如今,大部分车辆上均设置有转向装置以控制车轮转向,车轮转向通常采用基于阿克曼转向原理设计的转向梯形结构,并且一般通过曲柄连杆机构来驱动转向梯形结构变形。
32.参阅图1,图1为现有技术中一转向装置的结构示意图:
33.目前,曲柄连杆机构的连杆1与转向梯形结构的转向横拉杆2连接,为保证横向驱动力和运动范围,连杆1与转向横拉杆2的连接位置会靠近其中一个外球头点,由于该连接位置不对中,会导致曲柄在控制转向时,曲柄转动的角度不能左右对称分布,产生左右转向速度不一致的情况。
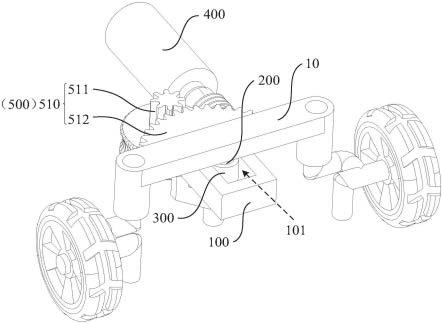
34.参阅图2至图4,图2为本实用新型一实施例中转向梯形结构及其驱动机构的结构示意图,图3为图2实施例中转向梯形结构及其驱动机构在另一视角下的结构示意图,图4为图2实施例中转向梯形结构及其驱动机构处于转向状态的结构示意图:
35.本实用新型提出一种转向梯形结构的驱动机构,该转向梯形结构的驱动机构包括:
36.摆臂100,摆臂100可在驱动下以一基点摆动,摆臂100上开设有垂直于其摆动方向的滑槽101;
37.滑柱200,滑柱200容置于滑槽101中,并可在滑槽101中滑动及转动,滑柱200的一端穿过滑槽101连接于转向梯形结构的转向横拉杆10的中点处。
38.本实施例的驱动机构用于驱动转向梯形结构变形,进而实现车辆转向。具体地,驱动机构通过在摆臂100上构造滑槽101,并将可在滑槽101中滑动及转动的滑柱200连接转向梯形结构的转向横拉杆10,当摆臂100摆动时,滑槽101的内壁将驱使滑柱200在滑槽101中滑动并相对滑槽101转动,滑柱200进而带动转向横拉杆10转动及横移,实现转向梯形结构的变形。
39.其中,滑柱200连接于转向横拉杆10的中点处,摆臂100对转向横拉杆10的驱动位置居中,当摆臂100摆动以驱动转向横拉杆10转动及横移时,向左转向或向右转向,转向横拉杆10的转动及横移的速度变化相同,从而使得车辆左右转向的转向速度一致。
40.具体地,摆臂100做摆动动作的驱动力可以由电机等提供,摆臂100在摆动时,摆动方向是与其臂体的长度方向相垂直的。对应的,滑槽101为条形滑槽,沿摆臂100臂体的长度方向设置。其中,在摆臂100的摆动过程中,滑柱200不经过摆臂100的基点。
41.在进行结构设置时,滑柱200可位于转向横拉杆10的下方,滑柱200的上端与转向横拉杆10连接,如图1所示;或者,滑柱200可位于转向横拉杆10的上方,滑柱200的下端与转向横拉杆10连接。
42.在一些实施例中,滑柱200被套设有套筒300,套筒300随滑柱200滑动及转动。其中,当摆臂100摆动时,套筒300随滑柱200在滑槽101中滑动并转动。通过在滑柱200上设置套筒300,可使摆臂100与滑柱200之间传动更加柔和平滑、不生硬。该套筒300可以是金属件、塑胶件等,根据实际情况选用设置。
43.在一些实施例中,转向梯形结构的驱动机构还包括:
44.舵机400,舵机400用于驱动摆臂100摆动。
45.本实施例中,舵机400的作用在于为摆臂100的摆动提供驱动力。具体地,舵机400的输出轴的旋转动作转换为摆臂100的摆动动作,其中,在一实施方案中,摆臂100与舵机400的输出轴固定连接,以通过舵机400的输出轴直接驱动摆臂100摆动。除此以外,还可以是其它实施方案。
46.在一些实施例中,转向梯形结构的驱动机构还包括:
47.减速机构500,减速机构500的输入端与舵机400连接,减速机构500的输出端与摆
臂100连接。
48.本实施例中,减速机构500的作用在于在舵机400与摆臂100之间进行减速传动。减速机构500的类型可以采用多种,比如减速齿轮副、减速传动带等,并且其减速传动级别可以采用一级、两级或三级不等,根据实际情况设置。
49.在一些实施例中,减速机构500包括直齿轮副510,直齿轮副510包括第一直齿轮511和与第一直齿轮511相啮合的第二直齿轮512;
50.第一直齿轮511与舵机400的输出轴传动连接,第二直齿轮512与摆臂100连接,并与摆臂100同轴运动。
51.本实施例中,第一直齿轮511的半径小于第二直齿轮512的半径,第二直齿轮512的中心,即为摆臂100进行摆动的基点。舵机400的输出轴输出驱动力以传动第一直齿轮511转动,第一直齿轮511进而啮合传动第二直齿轮512转动,以使得摆臂100摆动,传动稳定且工作可靠。
52.在一些实施例中,第二直齿轮512为扇形齿轮。
53.本实施例中,第二直齿轮512采用扇形齿轮,其可与摆臂100一体成型,并构造于摆臂100的一端,结构紧凑,有助于减小结构占用空间。
54.在一些实施例中,减速机构500还包括蜗轮蜗杆组件520;
55.蜗轮蜗杆组件520中的蜗杆521与舵机400的输出轴连接且同轴设置,蜗轮蜗杆组件520中的蜗轮522与第一直齿轮511连接且同轴设置。
56.本实施例中,蜗轮蜗杆组件520与直齿轮副510组合构成两级减速传动机构,其中,蜗轮蜗杆组件520为一级减速,直齿轮副510为二级减速。舵机400的输出轴转动以带动蜗杆521转动,蜗杆521传动蜗轮522转动,蜗轮522进而带动第一直齿轮511转动,传动平稳且噪音小。其中,蜗轮522与第一直齿轮511套设于一根转动轴上,以进行同轴设置。
57.在一些实施例中,减速机构500还包括锥齿轮副,锥齿轮副包括第一锥齿轮和与第一锥齿轮相啮合的第二锥齿轮;
58.第一锥齿轮与舵机400的输出轴连接且同轴设置,第二锥齿轮与第一直齿轮511连接且同轴设置。
59.本实施例中,锥齿轮副与直齿轮副510组合构成两级减速传动机构,其中,锥齿轮副为一级减速,直齿轮副510为二级减速。舵机400的输出轴转动以带动第一锥齿轮转动,第一锥齿轮传动第二锥齿轮转动,第二锥齿轮进而带动第一直齿轮511转动,结构紧凑且使用寿命长。
60.上述实施例中,在减速机构500设置蜗轮蜗杆组件520或锥齿轮副时,可使得舵机400的输出轴水平设置,以降低其安装高度,从而重心低,车身稳定,抓地力强,移动小车在行驶时更加平稳,转向时不易倾翻。
61.本实用新型还提出一种转向装置,该转向装置包括转向梯形结构和前述记载的转向梯形结构的驱动机构,对于该转向梯形结构的驱动机构,其具体结构参照上述实施例,由于本转向装置采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
62.本实用新型还提出一种移动小车,该移动小车包括前述实施例记载的转向装置,该转向装置的具体结构参照上述实施例,由于本移动小车采用了上述所有实施例的所有技
术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。