1.本发明涉及车辆控制领域,特别是涉及一种车辆转向控制方法、装置、电子设备和存储介质。
背景技术:
2.车辆的转向系统是指用来改变或保持车辆行驶或倒退方向的一系列装置,通常是借助转矩传感器感测转向盘的力矩和拟转动的方向,并传输至车辆ecu进行处理,车辆ecu会根据上述信号将电动机发出控制命令,使其输出相应的转动力矩,从而通过相应的机械传动使车辆的驱动轮做出相应的转动角度。
3.为保证车辆转向时的平稳性,阿克曼几何设计已出现在一些商务高端车型上。阿克曼角原理是指车辆转弯时,必然是内侧轮转弯角度大于外侧轮,这样汽车才能够围绕一个圆心进行转弯,而外侧轮与内侧轮的转角差就是阿克曼角。阿克曼转向在车辆转弯时,能够使得车辆所有车轮垂线均能指向圆心,以至于各车轮受外力的合力方向更加统一,车身过弯姿态就更加顺畅稳定。
4.对于某个车辆而言,其在设计初期即已确定了其阿克曼角,即其阿克曼角将不能再改变,而不同的路况下以及不同的转弯半径下,车辆的阿克曼角有必要进行调节。
技术实现要素:
5.为解决上述问题,本发明提出了一种车辆转向控制方法、装置、电子设备和存储介质。
6.本发明的主要内容包括:
7.一种车辆转向控制方法,包括如下步骤:
8.获取路面信息以及车辆的状态信息,确定主转向轮和辅转向轮,其中,主转向轮为转向时位于内侧的车轮,辅转向轮为位于主转向轮外侧的车轮;
9.根据车辆驾驶状态和阿克曼原理,计算得出主转向轮和辅转向轮的期望转角;
10.根据主转向轮和辅转向轮的期望转角,计算出相应的修正转角;
11.根据相应的修正转角,通过驱动主转向轮的主控制电机和驱动辅转向轮的辅控制电机分别对主转向轮和辅转向轮的转角进行修正。
12.优选的,获取路面信息以及车辆的状态信息,确定主转向轮和辅转向轮,包括:
13.获取车辆的驾驶状态;
14.当为自动驾驶状态时,根据采集到的路面信息,将位于弯道内侧的车轮标识为主转向轮,将位于弯道外侧的车轮标识为辅转向轮;
15.当为人工驾驶状态时,根据方向盘的转角方向,确定主转向轮和辅转向轮。
16.优选的,当为人工驾驶状态时,根据方向盘的转角方向,确定主转向轮和辅转向轮,包括:
17.将方向盘归零的位置标记为零度,方向盘左转角角度范围记为负转向角度,方向
盘左转角角度范围记为正转向角度,当获取到的方向盘转角角度为负转向角度时,将左前轮和/或左后轮标记为正转向轮;反之,将右前轮和/或右后轮标记为正转向轮。
18.优选的,根据车辆驾驶状态和阿克曼原理,计算得出主转向轮和辅转向轮的期望转角;包括:
19.在自动驾驶状态下,获取道路的转弯半径r、车辆的轴距l以及两主轴中心距k,根据计算得到辅转向轮的期望转角β;根据计算出主转向轮的期望转角α;
20.在人工驾驶状态下,获取辅转向轮的转向角度β、车辆的轴距l以及两主轴中心距k,根据计算出主转向轮的期望转角α。
21.优选的,计算出相应的修正转角后,还包括通过相应的修正电机分别对主转向轮和辅转向轮进行修正。
22.本发明还提出了一种车辆转向控制装置,包括:
23.转向控制单元,与车辆的控制系统连接,用于执行上述的车辆转向控制方法;所述转向控制单元包括:
24.转向请求模块,用于获取路面信息以及车辆的状态信息,路面信息包括转弯处的弯道半径,所述车辆的状态信息包括车辆的轴距、两主轴之间的中心距以及方向盘信号、车速信号;
25.转向决策模块,与转向请求模块连接,确定主转向轮和辅转向轮,并可根据阿克曼原理,计算得出主转向轮和辅转向轮的期望转角,并可根据主转向轮和辅转向轮的期望转角计算得出相应的修正转角;
26.转向控制模块,包括分别驱动左前轮或左后轮的左控制电机和驱动右前轮或右后轮的右控制电机,所述转向控制模块接收所述转向决策模块的控制信号,根据相应的修正转角,对左前轮和右前轮或左后轮和右后轮的转角进行修正。
27.优选的,所述转向控制模块还包括左修正电机和右修正电机,所述左修正电机和右修正电机与所述转向决策模块连接,按照相应的修正转角对主转向轮和辅转向轮的转角进行修正。
28.本发明还提出了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行计算机程序时实现上述车辆转向控制方法的步骤。
29.本发明还提出了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行上述车辆转向控制方法的步骤。
30.本发明提出的一种车辆转向控制方法、装置、电子设备和存储介质的有益效果在于,根据阿克曼原理,计算得出左、右轮理想的期望转角,然后通过相应的控制电机对左、右轮进行修正,实现了阿克曼角的可调,保证了车辆转向时的平稳性,而且还能适用于不同的路况。此外,左、右轮还分别接受左、右修正电机的驱动,在一定程度上起到了冗余的作用。
附图说明
31.图1为本发明的转向控制流程图;
32.图2为本发明的转向控制装置的功能框图。
具体实施方式
33.以下结合附图对本发明所保护的技术方案做具体说明。
34.本发明提出了一种车辆转向控制的装置,包括转向控制单元,所述转向控制单元与车辆的控制系统,如ecu、车辆中控系统、智驾系统等对接,通过计算得出左右轮的期望转角,驱动相应的控制电机对左右轮的转向角度进行修正,使左右轮的阿克曼角可调,能够适用于不同的路况,提高了车辆行驶的平稳性。
35.具体地,所述转向控制单元包括转向请求模块、转向决策模块以及转向控制模块,其中,所述转向请求模块与车辆的控制系统连接,不仅能够获取到车辆的状态信息,还能够获取路面信息,车辆的状态信息包括车辆的各种参数,如轴距、两主轴中心距以及车轮的转角角度等,还包括方向盘的转动方向和角度等,路面信息包括但不仅限于道路的行车线等数据。所述转向请求模块将上述信息传输至转向决策模块,由所述转向决策模块根据特定的情况对上述信息进行运算,得到左右车轮的期望转角;所述转向控制模块包括至少一个驱动左轮的左轮控制电机和至少一个驱动右轮的右轮控制电机,所述转向决策模块根据期望的转角,控制相应的控制电机对左右轮的转向转角进行修正。
36.即在其中一个实施例中,转向控制模块包括分别驱动左前轮或左后轮的左控制电机和驱动右前轮或右后轮的右控制电机,所述转向控制模块接收所述转向决策模块的控制信号,根据相应的修正转角,对左前轮和右前轮或左后轮和右后轮的转角进行修正。
37.在其他实施例中,所述转向控制模块还包括左修正电机和右修正电机,所述左修正电机和右修正电机与所述转向决策模块连接,按照相应的修正转角对主转向轮和辅转向轮的转角进行修正。
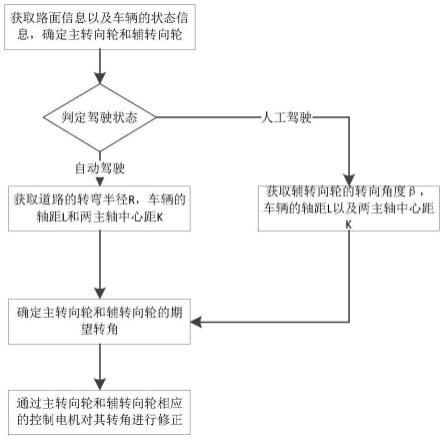
38.进一步地,本发明提出了一种车辆转向控制方法,如图1所示,包括如下步骤:
39.首先,获取路面信息以及车辆的状态信息,确定主转向轮和辅转向轮,其中,主转向轮为转向时位于内侧的车轮,辅转向轮为位于主转向轮外侧的车轮;当为自动驾驶状态时,根据采集到的路面信息,将位于弯道内侧的车轮标识为主转向轮,将位于弯道外侧的车轮标识为辅转向轮;而当为人工驾驶状态时,根据方向盘的转角方向,确定主转向轮和辅转向轮。
40.接着,根据车辆驾驶状态和阿克曼原理,计算得出主转向轮和辅转向轮的期望转角;
41.在自动驾驶状态下,获取道路的转弯半径r、车辆的轴距l以及两主轴中心距k,根据计算得到辅转向轮的期望转角β;根据计算出主转向轮的期望转角α;
42.在人工驾驶状态下,获取辅转向轮的转向角度β、车辆的轴距l以及两主轴中心距k,根据计算出主转向轮的期望转角α,在这种情况下,辅转向轮的期望转角即为获取到的转向角度β。
43.根据主转向轮和辅转向轮的期望转角,计算出相应的修正转角,并根据相应的修正转角,通过驱动主转向轮的主控制电机和驱动辅转向轮的辅控制电机分别对主转向轮和辅转向轮的转角进行修正。一种情况下,可以直接通过驱动主控制电机和辅控制电机来直接控制左右轮的转向角度,在其他实施例中,还可以通过为主转向轮和辅转向轮分别配置
相应的修正电机,在正常工作状态下,可以分别通过其对应的控制电机驱动车轮的转角,而通过修正电机对其转向转角进行修正,而当控制电机发生故障而无法工作时,还可以通过修正电机进行控制,起到冗余的作用。
44.本发明还提出了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行计算机程序时实现上述车辆转向控制方法的步骤。
45.本发明还提出了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行上述车辆转向控制方法的步骤。以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。