技术特征:
1.一种清洁机器人的拾物方法,其特征在于,所述方法包括:获取当前区域的环境图像;利用所述环境图像进行物体识别,得到目标物体的拾取参考信息;基于所述拾取参考信息,从所述清洁机器人的若干拾取部中,选出用于拾取所述目标物体的目标拾取部;其中,至少部分所述拾取部的拾取方式不同;控制所述目标拾取部对所述目标物体进行拾取。2.根据权利要求1所述的方法,其特征在于,所述基于所述拾取参考信息,从所述清洁机器人的若干拾取部中,选出用于拾取所述目标物体的目标拾取部,包括:获取所述拾取参考信息中的目标拾取部标识,从所述若干拾取部中选出所述目标拾取部标识对应的所述目标拾取部;或者,获取所述拾取参考信息中关于所述目标物体的属性信息,基于所述属性信息从所述若干拾取部中选出所述目标拾取部,其中,所述属性信息包括所述目标物体的类别、材质和体积中的至少一者。3.根据权利要求1或2任一项所述的方法,其特征在于,所述控制所述目标拾取部对所述目标物体进行拾取,包括:获取所述拾取参考信息中关于所述目标物体的拾取参数;响应于所述清洁机器人当前满足拾取条件,控制所述目标拾取部基于所述拾取参数对所述目标物体进行拾取。4.根据权利要求3所述的方法,其特征在于,所述拾取参数包括所述目标物体的拾取位置、拾取方位和拾取力度中的至少一者;和/或,所述拾取条件为所述清洁机器人与所述目标物体之间的距离小于或等于第一距离阈值。5.根据权利要求1至4任一项所述的方法,其特征在于,在所述控制所述目标拾取部对所述目标物体进行拾取之后,所述方法还包括:获取所述拾取参考信息中关于所述目标物体的类别;从若干盛放容器中,选出与所述目标物体的类别匹配的目标盛放容器;控制所述目标拾取部将拾取得到的所述目标物体放置至所述目标盛放容器中。6.根据权利要求1至5任一项所述的方法,其特征在于,在所述控制所述目标拾取部对所述目标物体进行拾取之后,所述方法还包括:响应于所述目标拾取部对所述目标物体拾取失败次数大于预设次数,选择除所述目标拾取部以外的其他拾取部对所述目标物体进行拾取;和/或,响应于所述目标拾取部对所述目标物体拾取失败次数大于所述预设次数,记录所述目标物体的信息,并向用户反馈所述目标物体的信息,其中,所述目标物体的信息包括所述目标物体的形状、图像、以及在所述当前区域中的位置中的至少一者。7.根据权利要求1至6任一项所述的方法,其特征在于,在所述利用所述环境图像进行物体识别之后,所述方法还包括:响应于对所述目标物体识别失败,向用户发出关于所述目标物体的讯问信息;响应于接收到用户的回复信息,基于所述回复信息选择其中一个所述拾取部对所述目标物体进行拾取;或者,响应于未接收到用户的回复信息,基于所述清洁机器人的配置信息
对所述目标物体进行处理。8.根据权利要求7所述的方法,其特征在于,所述回复信息包括所述目标物体的拾取参考信息,在所述基于所述回复信息选择其中一个所述拾取部对所述目标物体进行拾取之后,所述方法还包括:记录所述回复信息中的所述拾取参考信息,所述记录的拾取参考信用于对后续与所述目标物体同类的物体进行拾取;和/或,所述基于所述清洁机器人的配置信息对所述目标物体进行处理,包括:响应于所述配置信息为对所述目标物体进行拾取,利用其中一个所述拾取部对所述目标物体进行拾取;响应于所述配置信息为不对所述目标物体进行拾取,不对所述目标物体进行处理。9.根据权利要求1至8任一项所述的方法,其特征在于,在所述利用所述环境图像进行物体识别,得到目标物体的拾取参考信息之前,所述方法还包括:获取所述清洁机器人与所述目标物体之间的距离;响应于所述距离小于或等于第二距离阈值,执行所述利用所述环境图像进行物体识别,得到目标物体的拾取参考信息及其后续步骤。10.根据权利要求1至9任一项所述的方法,其特征在于,所述利用所述环境图像进行物体识别是利用物体识别模型执行的,所述方法还包括:获取若干初始样本图像,所述初始样本图像包含样本物体且标注有所述样本物体的拾取参考信息;基于至少一张所述初始样本图像,生成若干增强样本图像;利用所述若干初始样本图像和所述若干增强样本图像,对所述物体识别模型进行训练。11.根据权利要求10所述的方法,其特征在于,所述基于至少一张所述初始样本图像,生成若干增强样本图像,包括:利用经配置的第一位置角度的虚拟光源对所述初始样本图像中的样本物体进行照射;利用经配置的第二位置角度的虚拟摄像设备对所述虚拟光源照射下的所述样本物体进行拍摄,得到所述增强样本图像。12.根据权利要求1至11任一项所述的方法,其特征在于,所述若干拾取部包括吸式拾取部和握式拾取部,所述若干拾取部设于同一机械臂上或者不同机械臂上;和/或,所述获取当前区域的环境图像及其后续步骤是在所述清洁机器人进行清扫之前或者过程中执行的。13.一种清洁机器人的拾物装置,其特征在于,所述装置包括:获取模块,用于获取当前区域的环境图像;识别模块,用于利用所述环境图像进行物体识别,得到目标物体的拾取参考信息;选择模块,用于基于所述拾取参考信息,从所述清洁机器人的若干拾取部中,选出用于拾取所述目标物体的目标拾取部;其中,至少部分所述拾取部的拾取方式不同;控制模块,用于控制所述目标拾取部对所述目标物体进行拾取。14.一种清洁机器人,其特征在于,包括:机器人本体;
与所述机器人本体连接的若干拾取部;处理器,与所述若干拾取部通信连接,所述处理器用于执行如权利要求1-12任一项所述的清洁机器人的拾物方法。15.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有程序指令,所述处理器用于执行所述程序指令以实现如权利要求1-12任一项所述的清洁机器人的拾物方法。16.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序指令,所述程序指令能够被执行以实现如权利要求1-12任一项所述的清洁机器人的拾物方法。
技术总结
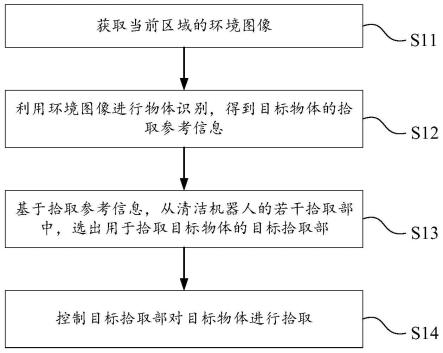
本申请公开了一种清洁机器人的拾物方法、装置及其相关设备和存储介质,该方法包括:获取当前区域的环境图像;利用环境图像进行物体识别,得到目标物体的拾取参考信息;基于拾取参考信息,从清洁机器人的若干拾取部中,选出用于拾取目标物体的目标拾取部;其中,至少部分拾取部的拾取方式不同;控制目标拾取部对目标物体进行拾取。通过上述方式,本申请能够实现清洁机器人采用不同的拾取方式对物体进行拾取,从而提高清洁机器人的清洁效果。从而提高清洁机器人的清洁效果。从而提高清洁机器人的清洁效果。
技术研发人员:李明军 唐明勇 解磊磊
受保护的技术使用者:北京市商汤科技开发有限公司
技术研发日:2022.04.26
技术公布日:2022/8/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。