1.本发明涉及水下推进器和压电驱动领域,尤其涉及一种仿海豚无人潜航器及其驱动方法。
背景技术:
2.建设海洋强国,必须进一步关心海洋、认识海洋、经略海洋,加快海洋科技创新步伐。“认识海洋”是“经略海洋”的基础,无人潜航器在“拓展远海、探查深海”中具有不可替代的作用,对未来海洋竞争和对抗将产生深刻影响。
3.现有结构功能一体化柔性仿生功能材料功率密度小,难以支撑有效负载;现有推进系统的驱动方法对水压敏感,电机传动效率随下潜深度的增加大幅下降直至失效,使大深度探测难以实现;现有无人潜航器装备了各类传感器,观测、通讯、交互能力大幅提升,使大潜深、长航时推进变成了短板。
4.压电双晶片具有结构简单、质量轻、带宽高、输出位移比普通压电陶瓷偏大的优点,采用压电双晶片驱动的开放式胸鳍驱动结构机动性强、可控性高、隐身性能好,为我国深海微型无人潜航器的集群化奠定基础。
技术实现要素:
5.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种仿海豚无人潜航器及其驱动方法。
6.本发明为解决上述技术问题采用以下技术方案:一种仿海豚无人潜航器,包括骨架、支架导轨、压电作动器、弹性薄板、第一连接杆、第二连接杆、偏航模块、尾骨、柔性连接件、尾鳍和蒙皮;所述支架导轨包含依次相连的第一夹持段、第一连接段、第一工作段、第二工作段、第三工作段、第二连接段、第二夹持段;所述第一工作段、第二工作段、第三工作段均为圆弧段,其中,所述第一、第三工作段结构相同,对称设置在第二工作段两端;第一工作段的半径小于第二工作段的半径;所述第一连接段和第二连接段、第一夹持段和第二夹持段均关于第一工作段和第三工作段的对称面对称;所述第一、第二夹持段相互平行设置且通过螺栓固定,将所述弹性薄板的一端夹持固定在其中;所述第一工作段、第二工作段、第三工作段的开口方向均指向第一夹持段,形成了配合压电作动器工作的工作轨道;所述压电作动器包含第一基体、第二基体、第一预紧弹簧、第一双晶片和第二双晶片;所述第一基体为柱体,其上端面设有第一v形槽;所述第二基体包含连接部和驱动部,所述连接部为柱体,所述驱动部为面积从上至下逐渐变小的变幅杆,连接部的下端面和驱动部的上端面形状相同且同轴固连;所述第一双晶片、第二双晶片结构相同,平行设置在第一基体、第二基体的驱动部之间,两端分别和第一基体、第二基体的驱动部固连,且第一双晶片和第二双晶片关于第一
v形槽的对称面对称;第一双晶片上两个压电陶瓷片和第二双晶片上两个压电陶瓷片的极化方向均相同;所述第一预紧弹簧设置在第一双晶片和第二双晶片之间,一端和第一基体固连,另一端和第二基体固连,成拉伸状态;所述弹性薄板一端夹持在所述第一夹持段、第二夹持段之间,另一端抵在压电作动器第一基体上的第一v形槽内,呈压缩状态,使得压电作动器第二基体的下端作为作动头抵住所述工作轨道的内壁;所述偏航模块包含第三基体、第四基体、第三双晶片、第四双晶片、以及第二预紧弹簧;所述第三基体、第四基体均为柱体;所述第三基体的下端面设有对称面平行的第二v形槽、第三v形槽,所述第四基体的上端面设有分别和所述第二v形槽、第三v形槽对应的第四v形槽、第五v形槽;所述第三双晶片、第四双晶片结构相同,平行设置在第三基体、第四基体的驱动部之间,其中,第三双晶片的两端分别抵在所述第二v形槽、第四v形槽内,第四双晶片的两端分别抵在所述第三v形槽、第五v形槽内;所述第二预紧弹簧设置在第三双晶片和第四双晶片之间,一端和第三基体固连,另一端和第四基体固连,成拉伸状态;第三双晶片上两个压电陶瓷片和第四双晶片上两个压电陶瓷片的极化方向均相同;所述第一连接杆、第二连接杆分别设置在所述工作轨道两侧,均一端和所述第二基体连接部固连、另一端和所述第三基体固连,使得第一预紧弹簧、第二预紧弹簧同轴;所述尾骨一端和所述第四基体固连,一端通过所述柔性连接件和所述尾鳍相连;所述骨架套在所述支架导轨外,和导轨支架的第一连接段、第二连接段固连,用于支撑所述蒙皮;所述蒙皮和所述骨架、尾鳍的外表面粘连,将所述支架导轨、压电作动器、弹性薄板、第一连接杆、第二连接杆、偏航模块、尾骨、柔性连接件包裹在内,呈海豚模样。
7.作为本发明一种仿海豚无人潜航器进一步的优化方案,所述弹性薄板采用65mn弹簧钢带制成,所述支架导轨采用铝合金、钛合金、金属玻璃中的任意一种制成,所述第一基体、第二基体均采用金属玻璃或磷青铜制成。
8.作为本发明一种仿海豚无人潜航器进一步的优化方案,所述尾鳍采用软质金属或塑料制成。
9.作为本发明一种仿海豚无人潜航器进一步的优化方案,所述蒙皮外还设有和蒙皮固连的胸鳍和背鳍,用于增强仿海豚无人潜航器的平衡性,所述胸鳍和背鳍均采用硬质胶体制成。
10.作为本发明一种仿海豚无人潜航器进一步的优化方案,所述蒙皮采用减摩材料制成,其外表面设有防腐蚀和防探测涂层。
11.本发明公开了一种该仿海豚无人潜航器的推进方法,包含以下步骤:在第一预紧弹簧拉力的作用下,第一双晶片、第二双晶片均朝内对称弯曲;如果需要波动推进:给所述第一双晶片、第二双晶片施加同频的驱动信号a、驱动信号b,调整驱动信号a、驱动信号b使其相位差为180度;当驱动信号a为正时,驱动信号b为负,第一双晶片、第二
双晶片对称回复成平直状态;当驱动信号a为负时,驱动信号b为正,第一双晶片、第二双晶片加大弯曲程度;第一双晶片、第二双晶片在弯曲和平直两个状态下来回切换,激发压电作动器使其纵向振动,压电作动器和工作轨道的内壁保持倾斜接触,压电作动器第二基体的作动头不断和工作轨道的内壁进行斜碰撞、脱离,产生摩擦;压电作动器依靠第二基体的作动头的不断摩擦,与支架导轨发生相对运动,经过尾骨和柔性连接件带动尾鳍上下摆动,具体运动的周期过程如下:步骤1),压电作动器带动尾鳍由第二工作段朝第一工作段行进;尾鳍拨水时克服水的阻力;步骤2),压电作动器带动尾鳍从第二工作段进入到第一工作段中;此时由于变半径导轨的弧线突变、坡度趋缓,压电作动器有绕第一工作段圆心旋转的趋势,在该旋转过程中弹性薄板开始松弛,弹性薄板的弹性势能得以部分释放;步骤3),由于弹性薄板松弛,其弹性势能释放,弹性薄板的弯曲拱向发生改变,搭向另一侧;加上压电作动器行程速度惯性的影响,压电作动器在弹性薄板的搭压作用下抵着第一工作段顺时针旋转,导致压电作动器与支架导轨的相对倾斜方向与步骤1)相反;此过程压电作动器带动柔性连接件的尾鳍,实现装置摆动的自动反向;步骤4),由于压电作动器与支架导轨的相对倾斜方向发生改变,压电作动器带动尾鳍由第一工作段朝第二工作段行进;步骤5),压电作动器带动尾鳍沿着支架导轨从第一工作段进入到第二工作段中;弹性薄板的压弯量增大导致其弹性势能也不断储存和增大;步骤6),压电作动器在第二工作段上朝第三工作段行进,摆动鳍向第三工作段方向拨水;步骤7),压电作动器带动尾鳍从第二工作段进入到第三工作段中,此时由于变半径导轨的弧线突变、坡度趋缓,压电作动器有绕第三工作段圆心旋转的趋势,在该旋转过程中弹性薄板开始松弛,弹性薄板的弹性势能得以部分释放;步骤8),由于弹性薄板松弛,其弹性势能释放,弹性薄板的弯曲拱向发生改变,搭向另一侧;加上压电作动器行程速度惯性的影响,压电作动器在弹性薄板的搭压作用下抵着第三工作段逆时针旋转,导致压电作动器与支架导轨的相对倾斜方向与步骤7)相反;此过程压电作动器带动柔性连接件的尾鳍,实现装置摆动的自动反向;步骤9),由于压电作动器与支架导轨的相对倾斜方向发生改变,压电作动器带动尾鳍由第三工作段朝第二工作段行进;步骤10),压电作动器带动尾鳍沿着支架导轨从第三工作段进入到第二工作段中;弹性薄板的压弯量增大导致其弹性势能也不断储存和增大;如果需要俯身推进:给所述第一双晶片施加驱动信号a,第二双晶片不施加驱动信号,当驱动信号a为正时,第一双晶片回复平直状态,第二双晶片保持弯曲,当驱动信号a为负时,第一双晶片、第二双晶片弯曲,由于压电作动器与支架导轨接触处在往复两个方向上夹角不同,接触压力也不同,形成往复运动的速度差,使得尾鳍上摆动时水动反力小、下摆动时水动反力大,实现潜航器俯身推进;如果需要仰身推进方法:
给所述第二双晶片施加驱动信号b,第一双晶片不施加驱动信号,当驱动信号b为负时,第二双晶片回复平直状态,第一双晶片保持弯曲;当驱动信号b为正时,第一双晶片、第二双晶片弯曲,由于压电作动器与支架导轨接触处在往复两个方向上夹角不同,接触压力也不同,形成往复运动的速度差,使得尾鳍上摆动时水动反力大、下摆动时水动反力小,实现潜航器仰身推进。
12.本发明还公开了一种该仿海豚无人潜航器的偏航方法,具体步骤如下:所述第三双晶片、第四双晶片在第二预紧弹簧拉力的作用下都朝拉簧方向弯曲,第四双晶片弯曲方向与极化方向相同,第三双晶片弯曲方向与极化方向相反;如果需要正向偏航:分别给所述第一双晶片、第二双晶片施加同频的驱动信号a、驱动信号b,使其相位差为180
°
,激发压电作动器带动尾鳍往复摆动;同时给所述第三双晶片施加驱动信号c,激发第三双晶片从弯曲状态中回复成平直状态,继而通过第二预紧弹簧、第三基体、第四基体带动第四双晶片同向偏转,同向偏转过程中,同向水动力小,反向水动力大;如果需要反向偏航:分别给所述第一双晶片、第二双晶片施加同频的驱动信号a、驱动信号b,使其相位差为180
°
,激发压电作动器带动尾鳍往复摆动;同时给所述第四双晶片施加驱动信号d,,激发第四双晶片从弯曲状态中回复成平直状态,继而通过第二预紧弹簧,第三基体,第四基体带动第三双晶片同向偏转,反向偏转过程中,反向水动力小,同向水动力大。
13.本发明采用以上技术方案与现有技术相比,具有以下技术效果:1. 结构简单,便于小型化,集群化;2. 控制方式简单;3. 开放式结构,适应高水压、成本低。
附图说明
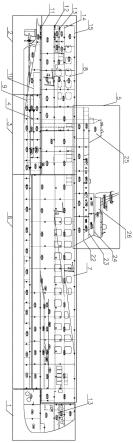
14.图1是本发明的结构示意图;图2是本发明中动力部分的结构示意图;图3是本发明中支架导轨的结构示意图;图4是本发明中压电作动器的结构示意图;图5是本发明中第一连接杆、第二连接杆、偏航模块、摆动鳍相配合的结构示意图;图6是本发明中双晶片在未预弯和预弯时弯曲程度对比图;图7是本发明中双晶片组在预弯时通电方向,极化方向与弯曲方向关系图;图8是本发明波动推进时的结构工作原理示意图;图9是本发明波动推进时海豚豚体流线变化图;图10是本发明俯仰推进时的结构工作原理示意图;图11是本发明中偏航模块偏航的原理示意图。
15.图中,1-支架导轨,2-弹性薄板,3-压电作动器,4-第一连接杆,5-第二连接杆,6-偏航模块,7-尾骨,8-柔性连接件,9-尾鳍,1.1-第一夹持段,1.2-第一连接段,1.3-工作轨道,1.4-第二连接段,1.5-第二夹持段,1.3.1-第一工作段,1.3.2-第二工作段,1.3.3-第三工作段,3.1-第一基体,3.2-第二基体,3.3-第一预紧弹簧,3.4-第一双晶片,3.5-第二双晶
片,6.1-第三基体,6.2-第四基体,6.3-第二预紧弹簧,6.4-第三双晶片,6.5-第四双晶片。
具体实施方式
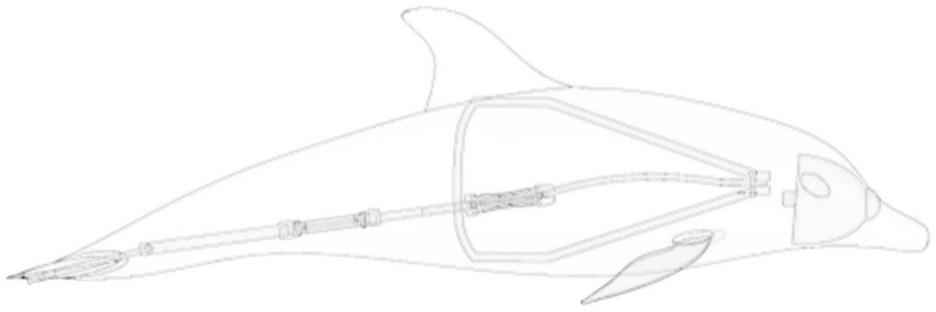
16.下面结合附图对本发明的技术方案做进一步的详细说明:本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
17.如图1、图2所示,本发明公开了一种仿海豚无人潜航器,包括骨架、支架导轨、压电作动器、弹性薄板、第一连接杆、第二连接杆、偏航模块、尾骨、柔性连接件、尾鳍和蒙皮。图1为效果图,在本发明的基础上,可以在仿海豚无人潜航器的蒙皮内安装前舱和左右舱,用以放置传感器、通讯、控制、电池、监控等设备,可以实现深海工作需求。图2则为本发明中动力部分的结构示意图。
18.如图3所示,所述支架导轨包含依次相连的第一夹持段、第一连接段、第一工作段、第二工作段、第三工作段、第二连接段、第二夹持段;所述第一工作段、第二工作段、第三工作段均为圆弧段,其中,所述第一、第三工作段结构相同,对称设置在第二工作段两端;第一工作段的半径小于第二工作段的半径;所述第一连接段和第二连接段、第一夹持段和第二夹持段均关于第一工作段和第三工作段的对称面对称;所述第一、第二夹持段相互平行设置且通过螺栓固定,将所述弹性薄板的一端夹持固定在其中;所述第一工作段、第二工作段、第三工作段的开口方向均指向第一夹持段,形成了配合压电作动器工作的工作轨道;如图4所示,所述压电作动器包含第一基体、第二基体、第一预紧弹簧、第一双晶片和第二双晶片;所述第一基体为柱体,其上端面设有第一v形槽;所述第二基体包含连接部和驱动部,所述连接部为柱体,所述驱动部为面积从上至下逐渐变小的变幅杆,连接部的下端面和驱动部的上端面形状相同且同轴固连;所述第一双晶片、第二双晶片结构相同,平行设置在第一基体、第二基体的驱动部之间,两端分别和第一基体、第二基体的驱动部固连,且第一双晶片和第二双晶片关于第一v形槽的对称面对称;第一双晶片上两个压电陶瓷片和第二双晶片上两个压电陶瓷片的极化方向均相同;所述第一预紧弹簧设置在第一双晶片和第二双晶片之间,一端和第一基体固连,另一端和第二基体固连,成拉伸状态;所述弹性薄板一端夹持在所述第一夹持段、第二夹持段之间,另一端抵在压电作动器第一基体上的第一v形槽内,呈压缩状态,使得压电作动器第二基体的下端作为作动头抵住所述工作轨道的内壁;如图5所示,所述偏航模块包含第三基体、第四基体、第三双晶片、第四双晶片、以及第二预紧弹簧;所述第三基体、第四基体均为柱体;所述第三基体的下端面设有对称面平行的第二v形槽、第三v形槽,所述第四基体的上端面设有分别和所述第二v形槽、第三v形槽对应的第四v形槽、第五v形槽;所述第三双晶片、第四双晶片结构相同,平行设置在第三基体、第四基体的驱动部
之间,其中,第三双晶片的两端分别抵在所述第二v形槽、第四v形槽内,第四双晶片的两端分别抵在所述第三v形槽、第五v形槽内;所述第二预紧弹簧设置在第三双晶片和第四双晶片之间,一端和第三基体固连,另一端和第四基体固连,成拉伸状态;第三双晶片上两个压电陶瓷片和第四双晶片上两个压电陶瓷片的极化方向均相同;所述第一连接杆、第二连接杆分别设置在所述工作轨道两侧,均一端和所述第二基体连接部固连、另一端和所述第三基体固连,使得第一预紧弹簧、第二预紧弹簧同轴;所述尾骨一端和所述第四基体固连,一端通过所述柔性连接件和所述尾鳍相连;所述骨架套在所述支架导轨外,和导轨支架的第一连接段、第二连接段固连,用于支撑所述蒙皮;所述蒙皮和所述骨架、尾鳍的外表面粘连,将所述支架导轨、压电作动器、弹性薄板、第一连接杆、第二连接杆、偏航模块、尾骨、柔性连接件包裹在内,呈海豚模样。
19.压电双晶片是一种技术成熟的压电器件,经预弯可获得更大的弯曲变形,在第一预紧弹簧拉力的作用下,第一双晶片、第二双晶片均朝内对称弯曲,在第二预紧弹簧拉力的作用下,第三双晶片、第四双晶片均朝内对称弯曲,如图6所示。
20.下面以任意一堆双晶片来进行举例说明,将两片双晶片如图7所示摆放,两片双晶片的极化方向一样,均朝上;在两侧夹持端和预紧拉簧拉力的作用下,上片双晶片弯曲方向朝下,与极化方向相反,下片双晶片弯曲方向朝上,与极化方向相同;给所述上片双晶片施加驱动信号,驱动信号为负时,弯曲方向不变,与极化方向相反;给上片双晶片施加驱动信号,驱动信号为正时,弯曲方向改变,与极化方向相同,上片双晶片弯曲方向同下片双晶片一致;给下片双晶片施加驱动信号,驱动信号为正时,弯曲方向不变,与极化方向相同;给下片双晶片施加驱动信号,驱动信号为负时,弯曲方向改变,与极化方向相反,下片双晶片弯曲方向同上片双晶片一致。
21.本发明还公开了一种仿海豚无人潜航器的推进方法,包含以下步骤:如图8和图9所示,如果需要波动推进:给所述第一双晶片、第二双晶片施加同频的驱动信号a、驱动信号b,调整驱动信号a、驱动信号b使其相位差为180度;当驱动信号a为正时,驱动信号b为负,第一双晶片、第二双晶片对称回复成平直状态;当驱动信号a为负时,驱动信号b为正,第一双晶片、第二双晶片加大弯曲程度;第一双晶片、第二双晶片在弯曲和平直两个状态下来回切换,激发压电作动器使其纵向振动,压电作动器和工作轨道的内壁保持倾斜接触,压电作动器第二基体的作动头不断和工作轨道的内壁进行斜碰撞、脱离,产生摩擦;压电作动器依靠第二基体的作动头的不断摩擦,与支架导轨发生相对运动,经过尾骨和柔性连接件带动尾鳍上下摆动,具体运动的周期过程如下:步骤1),如图9中的状态1所示,压电作动器带动摆动鳍由第二工作段朝第一工作段行进;摆动鳍拨水时克服水的阻力;步骤2),如图9中的状态2所示,压电作动器带动尾鳍从第二工作段进入到第一工作段中;此时由于变半径导轨的弧线突变、坡度趋缓,压电作动器有绕第一工作段圆心旋转的趋势,在该旋转过程中弹性薄板开始松弛,弹性薄板的弹性势能得以部分释放;步骤3),由于弹性薄板松弛,其弹性势能释放,弹性薄板的弯曲拱向发生改变,搭向另一侧;加上压电作动器行程速度惯性的影响,压电作动器在弹性薄板的搭压作用下抵
着第一工作段顺时针旋转,导致压电作动器与支架导轨的相对倾斜方向与步骤1)相反;此过程压电作动器带动柔性连接件的尾鳍,实现装置摆动的自动反向;步骤4),如图9中的状态3所示,由于压电作动器与支架导轨的相对倾斜方向发生改变,压电作动器带动尾鳍由第一工作段朝第二工作段行进;步骤5),如图9中的状态4所示,压电作动器带动尾鳍沿着支架导轨从第一工作段进入到第二工作段中;弹性薄板的压弯量增大导致其弹性势能也不断储存和增大;步骤6),如图9中的状态5所示,压电作动器在第二工作段上朝第三工作段行进,摆动鳍向第三工作段方向拨水;步骤7),如图9中的状态6所示,压电作动器带动尾鳍从第二工作段进入到第三工作段中,此时由于变半径导轨的弧线突变、坡度趋缓,压电作动器有绕第三工作段圆心旋转的趋势,在该旋转过程中弹性薄板开始松弛,弹性薄板的弹性势能得以部分释放;步骤8),由于弹性薄板松弛,其弹性势能释放,弹性薄板的弯曲拱向发生改变,搭向另一侧;加上压电作动器行程速度惯性的影响,压电作动器在弹性薄板的搭压作用下抵着第三工作段逆时针旋转,导致压电作动器与支架导轨的相对倾斜方向与步骤7)相反;此过程压电作动器带动柔性连接件的尾鳍,实现装置摆动的自动反向;步骤9),如图9中的状态7所示,由于压电作动器与支架导轨的相对倾斜方向发生改变,压电作动器带动尾鳍由第三工作段朝第二工作段行进;步骤10),如图9中的状态8所示,压电作动器带动尾鳍沿着支架导轨从第三工作段进入到第二工作段中;弹性薄板的压弯量增大导致其弹性势能也不断储存和增大;如图10所示,如果需要俯身推进:给所述第一双晶片施加驱动信号a,第二双晶片不施加驱动信号,当驱动信号a为正时,第一双晶片回复平直状态,第二双晶片保持弯曲,当驱动信号a为负时,第一双晶片、第二双晶片弯曲,由于压电作动器与支架导轨接触处在往复两个方向上夹角不同,接触压力也不同,形成往复运动的速度差,造成尾鳍上摆动时水动反力小、下摆动时水动反力大,实现潜航器俯身推进;如果需要仰身推进方法:给所述第二双晶片施加驱动信号b,第一双晶片不施加驱动信号,当驱动信号b为负时,第二双晶片回复平直状态,第一双晶片保持弯曲;当驱动信号b为正时,第一双晶片、第二双晶片弯曲,由于压电作动器与支架导轨接触处在往复两个方向上夹角不同,接触压力也不同,形成往复运动的速度差,造成尾鳍上摆动时水动反力大、下摆动时水动反力小,实现潜航器仰身推进。
22.本发明还公开了一种该仿海豚无人潜航器的偏航方法,具体步骤如下:所述第三双晶片、第四双晶片在第二预紧弹簧拉力的作用下都朝拉簧方向弯曲,第四双晶片弯曲方向与极化方向相同,第三双晶片弯曲方向与极化方向相反;如图11所示,如果需要正向偏航:分别给所述第一双晶片、第二双晶片施加同频的驱动信号a、驱动信号b,使其相位差为180
°
,激发压电作动器带动尾鳍往复摆动;同时给所述第三双晶片施加驱动信号c,激发第三双晶片从弯曲状态中回复成平直状态,继而通过第二预紧弹簧、第三基体、第四基体带动第四双晶片同向偏转,同向偏转过程中,同向水动力小,反向水动力大;
如果需要反向偏航:分别给所述第一双晶片、第二双晶片施加同频的驱动信号a、驱动信号b,使其相位差为180
°
,激发压电作动器带动尾鳍往复摆动;同时给所述第四双晶片施加驱动信号d,,激发第四双晶片从弯曲状态中回复成平直状态,继而通过第二预紧弹簧,第三基体,第四基体带动第三双晶片同向偏转,反向偏转过程中,反向水动力小,同向水动力大。
23.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
24.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。