1.本发明属于相机校正技术领域,具体为一种光电相机姿态校正机器人。
背景技术:
2.在机器视觉检测系统中,线阵ccd/coms相机以其高分辨率、高效数据采集等特点备受青睐,为了采集高质量的图像,需要对相机的姿态进行高精度的校正,相机姿态校正是否精确,直接关系到目标检测精度和识别准确率。在现有的相机姿态校正装置中,存在自动化程度低,校正效率低的缺陷。
3.为此,如何提供一种可实现相机姿态的全自动精准校正,为采集高质量图像提高保障的新型光电相机姿态校正机器人,成为本领域技术人员需要解决的问题。
技术实现要素:
4.本发明为解决现有技术存在的不足之处,提供了一种光电相机姿态校正机器人,该装置可以广泛用于光电相机的姿态自动校正工作,实现光电相机姿态的高效、准确的自动校正。
5.为达上述目的,本发明采用的技术方案如下,
6.一种光电相机姿态校正机器人,包括上执行机构,下执行机构,机器人控制器,其特征在于:所述上执行机构设置在下执行机构的上方,所述机器人控制器设置在下执行机构的外部,所述上执行机构、下执行机构均与机器人控制器电连接,所述上行机构包括相机固定面板、角度调整关节、水平调整装置和竖直调整装置,所述角度调整关节的一端与相机固定面板的四角固定连接,所述角度调整关节的另一端与水平调整装置固定连接,所述水平调整装置设置在竖直调整装置上,所述竖直调整装置与下执行机构转动连接。
7.进一步的,所述角度调整关节包括第一球形万向节球形凹槽底座、第二球形万向节球形凹槽底座、第三球形万向节球形凹槽底座、第四球形万向节球形凹槽底座、第一球形万向节、第二球形万向节、第三球形万向节和第四球形万向节,所述第一球形万向节的球形活动端、第二球形万向节的球形活动端、第三球形万向节的球形活动端、第四球形万向节的球形活动端分别设置在第一球形万向节球形凹槽底座、第二球形万向节球形凹槽底座、第三球形万向节球形凹槽底座、第四球形万向节球形凹槽底座中,所述第一球形万向节与第一球形万向节球形凹槽底座转动连接,第二球形万向节与第二球形万向节球形凹槽底座转动连接,第三球形万向节与第三球形万向节球形凹槽底座转动连接,第四球形万向节与第四球形万向节球形凹槽底座转动连接。
8.进一步的,所述水平调整装置包括第一伺服电动推杆、第二伺服电动推杆、第三伺服电动推杆、第四伺服电动推杆、第一伺服电动推杆固定板和第二伺服电动推杆固定板,所述第一伺服电动推杆与第二伺服电动推杆固定在第一伺服电动推杆固定板上,第三伺服电动推杆与第四伺服电动推杆固定在第二伺服电动推杆固定板上,所述第一球形万向节的圆柱端与第一伺服电动推杆的推杆固定连接,所述第二球形万向节的圆柱端与第二伺服电动
推杆的推杆固定连接,所述第三球形万向节的圆柱端与第三伺服电动推杆固定连接,所述第四球形万向节的圆柱端与第四伺服电动推杆的推杆固定连接。
9.进一步的,所述竖直调整装置包括第一连接块、第二连接块、第一微型丝杠、第二微型丝杠、上固定底座、第一孔式旋转底座和第二孔式旋转底座,第一伺服电动推杆固定板与第一连接块固定连接,第一连接块设置在第一微型丝杠中,第一连接块与第一微型丝杠驱动连接,第二伺服电动推杆固定板与第二连接块固定连接,第二连接块设置在第二微型丝杠中,第二连接块与第二微型丝杠驱动连接,第一微型丝杠与第二微型丝杠固定在上固定底座上,第一孔式旋转底座与第二孔式旋转底座固定在上固定底座上。
10.进一步的,所述下执行机构包括第一横向丝杠、第二横向丝杠、第一纵向丝杠、第二纵向丝杠、第一轴式旋转底座、第二轴式旋转底座、第一丝杠连接板、第二丝杠连接板、第一轴承、第二轴承、卡槽箱、卡槽箱盖板和底座;所述第一横向丝杠与第二横向丝杠固定在底座上,第一丝杠连接板与第一横向丝杠的滑块固定连接,第二丝杠连接板与第二横向丝杠滑块固定连接,第一纵向丝杠与第二纵向丝杠的头部与第一丝杠连接板固定连接,第一纵向丝杠与第二纵向丝杠的尾部与第二丝杠连接板固定连接,第一轴式旋转底座与第一纵向丝杠的滑台固定连接,第二轴式旋转底座与第二纵向丝杠固定连接,卡槽箱固定在底座上,卡槽箱设置有卡槽箱盖板,卡槽箱与卡槽箱盖板通过滑动连接。
11.进一步的,上执行机构中的第一孔式旋转底座通过第一轴承与下执行机构中的第一轴式旋转底座转动连接,第二孔式旋转底座通过第二轴承与第二轴式旋转底座转动连接。
12.进一步的,所述机器人控制器包括控制器壳体、电路板、控制按键和控制器显示屏,所述电路板设置在壳体内部,所述控制按键和控制器显示屏设置在壳体上,所述控制器显示屏和所述控制按键分别与电路板电连接,所述控制按键包括第一伺服电动推杆控制按键、第二伺服电动推杆控制按键、第三伺服电动推杆控制按键、第四伺服电动推杆控制按键、伺服电动推杆同步使能按键、控制器使能按键、第二微型丝杠控制按键、第一微型丝杠控制按键、微型丝杠同步使能按键、第一纵向丝杠控制按键、第二纵向丝杠控制按键、纵向丝杠同步时能按键、第一横向丝杠控制按键与第二横向丝杠控制按键、控制器开关按键、自动/手动切换按键、复位按键和急停按键。
13.本发明的有益效果为:
14.1.自由度高,校正准确:本机器人具有较高的自由度,在光电相机姿态校正时,角度调整关节、水平调整装置和竖直调整装置的设置,可同时校正x方向、y方向以及z方向的位置,可实现快速准确高效的全空间立体校正。
15.2.自动化、机电化程度较高:本机器人中的执行部件采用了丝杠机构、伺服电动推杆作为主要的执行元件,具有较高的自动化、机电化程度。
16.3.控制精度较高:丝杠机构、伺服电动推杆具有较高的调整精度,控制灵敏且控制精度高,因此整机的机电执行部分具有较高的控制精度。
17.4.反馈灵敏:丝杠机构、伺服电动推杆具有采用闭环反馈拥有较高的反馈灵敏度,使本机器人反馈灵敏。
附图说明
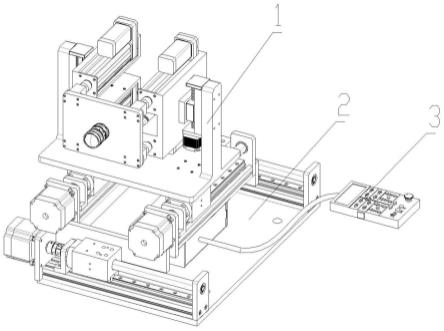
18.图1为本发明的主体结构示意图;
19.图2为本发明上执行机构结构示意图;
20.图3为本发明上执行机构另一角度结构示意图;
21.图4为本发明下执行机构结构示意图;
22.图5为本发明机器人控制器结构示意图。
23.其中,上执行机构1;下执行机构2;机器人控制器3;相机固定面板102;第一球形万向节球形凹槽底座103;第二球形万向节球形凹槽底座121;第三球形万向节球形凹槽底座117;第四形万向节球形凹槽底座115;第一球形万向节104;第二球形万向节122;第三球形万向节118;第四球形万向节116;第一伺服电动推杆101;第二伺服电动推杆109;第三伺服电动推杆110;第四伺服电动推杆111;第一伺服电动推杆固定板120;第二伺服电动推杆固定板114;第一连接块105;第二连接块113;第一微型丝杠106;第二微型丝杠112;上固定底座107;第一孔式旋转底座108;第二孔式旋转底座123;第一横向丝杠205;第二横向丝杠208;第一纵向丝杠211;第二纵向丝杠203;第一轴式旋转底座210;第二轴式旋转底座202;第一丝杠连接板204;第二丝杠连接板207;第一轴承209;第二轴承201;卡槽箱212;卡槽箱盖板213;底座206;第一伺服电动推杆控制按键301;第二伺服电动推杆控制按键302;第三伺服电动推杆控制按键303;第四伺服电动推杆控制按键304;伺服电动推杆同步使能按键305;第二微型丝杠控制按键307;第一微型丝杠控制按键308;微型丝杠同步使能按键309;第一纵向丝杠控制按键310;第二纵向丝杠控制按键311;纵向丝杠同步时能按键312;第一横向丝杠与第二横向丝杠控制按键313;控制器使能按键306;控制器开关按键314;自动/手动切换按键315;复位按键316;控制器显示屏317;急停按键318。
具体实施方式
24.为达成上述目的及功效,本发明所采用的技术手段及构造,结合附图就本发明较佳实施例详加说明其特征与功能。
25.在本发明的描述中,需要说明的是,术语、“上”、“下”、“左”、“右”、“一侧”、“内”、“外”、“旁”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
26.实施例1
27.如图1-5所示,本发明中提供了一种光电相机姿态校正机器人,包括上执行机构1,下执行机构2和机器人控制器3,上执行机构1设置在下执行机构2的上方,机器人控制器3设置在下执行机构2的外部,上执行机构1、下执行机构2均与机器人控制器3电连接,上执行机构1包括相机固定面板102,相机固定面板102四角分别与第一球形万向节球形凹槽底座103、第二球形万向节球形凹槽底座121、第三球形万向节球形凹槽底座117、第四球形万向节球形凹槽底座115固定连接,第一球形万向节球形凹槽底座103与第一球形万向节104球
形活动端配合转动连接,第一球形万向节104圆柱端与第一伺服电动推杆101固定连接,第二球形万向节球形凹槽底座121与第二球形万向节122球形活动端配合转动连接,第二球形万向节122圆柱端与第二伺服电动推杆109固定连接,第三球形万向节球形凹槽底座117与第三球形万向节118球形活动端配合转动连接,第三球形万向节118圆柱端与第三伺服电动推杆110固定连接,第四球形万向节球形凹槽底座115与第四球形万向节116球形活动端配合转动连接,第四球形万向节116圆柱端与第四伺服电动推杆111固定连接。
28.第一伺服电动推杆101与第二伺服电动推杆109固定在第一伺服电动推杆固定板120上,第三伺服电动推杆110与第四伺服电动推杆111固定在第二伺服电动推杆固定板114上,第一伺服电动推杆固定板120与第一连接块105固定连接,第一连接块105设置在第一微型丝杠106中,第一连接块105与第一微型丝杠106驱动连接,第二伺服电动推杆固定板114与第二连接块113固定连接,第二连接块113设置在第二微型丝杠112中,第二连接块113与第二微型丝杠112驱动连接,第一微型丝杠106与第二微型丝杠112固定在上固定底座107上,第一孔式旋转底座108与第二孔式旋转底座123固定在上固定底座107上。
29.下执行机构2包括第一横向丝杠205、第二横向丝杠208、第一纵向丝杠211、第二纵向丝杠203、第一轴式旋转底座210、第二轴式旋转底座202、第一丝杠连接板204、第二丝杠连接板207、第一轴承209、第二轴承201、卡槽箱212、卡槽箱盖板213和底座206;第一横向丝杠205与第二横向丝杠208固定在底座206上,第一丝杠连接板204与第一横向丝杠205的滑块固定连接,第二丝杠连接板207与第二横向丝杠208滑块固定连接,第一纵向丝杠211与第二纵向丝杠203的头部与第一丝杠连接板204固定连接,第一纵向丝杠211与第二纵向丝杠203的尾部与第二丝杠连接板207固定连接,第一轴式旋转底座210与第一纵向丝杠211的滑台固定连接,第二轴式旋转底座202与第二纵向丝杠203固定连接,卡槽箱212固定在底座206上,卡槽箱212设置有卡槽箱盖板213,卡槽箱212与卡槽箱盖板213滑动连接。
30.上执行机构1与下执行机构2相配合,上执行机构1中的第一孔式旋转底座108通过第一轴承209与下执行机构中的第一轴式旋转底座210转动连接,第二孔式旋转底座123通过第二轴承201与第二轴式旋转底座202转动连接。
31.机器人控制器3包括控制器壳体、电路板、控制按键和控制器显示屏317,电路板设置在壳体内部,控制按键和控制器显示屏317设置在壳体上,控制器显示屏317与电路板电连接,控制按键包括第一伺服电动推杆控制按键301、第二伺服电动推杆控制按键302、第三伺服电动推杆控制按键303、第四伺服电动推杆控制按键304、伺服电动推杆同步使能按键305、第二微型丝杠控制按键307、第一微型丝杠控制按键308、微型丝杠同步使能按键309、第一纵向丝杠控制按键310、第二纵向丝杠控制按键311、纵向丝杠同步时能按键312,第一横向丝杠与第二横向丝杠控制按键313、控制器使能按键306、控制器开关按键314、自动/手动切换按键315、复位按键316和急停按键318。
32.本实施例的优点在于:
33.通过设置第一球形万向节球形凹槽底座103、第二球形万向节球形凹槽底座121、第三球形万向节球形凹槽底座117、第四形万向节球形凹槽底座115与第一球形万向节104、第二球形万向节122、第三球形万向节118、第四球形万向节116相配合形成球形万向节配合,第一伺服电动推杆101、第二伺服电动推杆109、第三伺服电动推杆110、第四伺服电动推杆111,伺服电动推杆的伸缩运动转化为相机固定面板102的角度及深度的运动,实现了相
机所在平面的角度及深度的实时调节功能,是一种适应于自动校正的新型机械结构,同时因为设有第一微型丝杠106与第二微型丝杠112,所以可以不断调节相机在z相高度,与传统的机械机构相比具有较好的实时性;
34.在上机构的旋转过程中采用了第一轴式旋转底座210、第二轴式旋转底座202、第一孔式旋转底座108、第二孔式旋转底座123、第一轴承209、第二轴承201等机构,将第一纵向丝杠211与第二纵向丝杠203的滑块运动差转为上执行机构的旋转角度,利用改方式实现上执行机构旋转的方法具有结构简单成本较低,且具有较好的可控制性及控制精度;
35.通过设置机器人控制器3,可以进行各个执行元件的单独调试,同时设有同步使能按键可进行同时调试,提高了调试的效率,设有自动/手动切换按键方便切换机器人的自动校正与手动校正功能,设有急停按键可以及时停止机器人运转,提高机器人的安全性,同时控制按钮的使用需要搭配使能按键,进一步提高设备安全系数。
36.以上所述,仅是本发明较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
