技术特征:
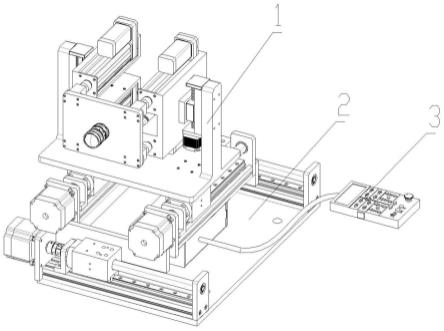
1.一种光电相机姿态校正机器人,包括上执行机构(1),下执行机构(2)和机器人控制器(3),其特征在于:所述上执行机构(1)设置在下执行机构(2)的上方,所述机器人控制器(3)设置在下执行机构(2)的外部,所述上执行机构(1)、下执行机构(2)均与机器人控制器(3)电连接,所述上执行机构(1)包括相机固定面板(102)、角度调整关节、水平调整装置和竖直调整装置,所述角度调整关节的一端与相机固定面板的四角固定连接,所述角度调整关节的另一端与水平调整装置固定连接,所述水平调整装置设置在竖直调整装置上,所述竖直调整装置与下执行机构(2)转动连接。2.根据权利1所述的一种光电相机姿态校正机器人,其特征在于:所述角度调整关节包括第一球形万向节球形凹槽底座(103)、第二球形万向节球形凹槽底座(121)、第三球形万向节球形凹槽底座(117)、第四球形万向节球形凹槽底座(115)、第一球形万向节(104)、第二球形万向节(122)、第三球形万向节(118)和第四球形万向节(116),所述第一球形万向节(104)的球形活动端、第二球形万向节(122)的球形活动端、第三球形万向节(118)的球形活动端、第四球形万向节(116)的球形活动端分别设置在第一球形万向节球形凹槽底座(103)、第二球形万向节球形凹槽底座(121)、第三球形万向节球形凹槽底座(117)、第四球形万向节球形凹槽底座(115)中,所述第一球形万向节(104)与第一球形万向节球形凹槽底座(103)转动连接,第二球形万向节(122)与第二球形万向节球形凹槽底座(121)转动连接,第三球形万向节(118)与第三球形万向节球形凹槽底座(117)转动连接,第四球形万向节(116)与第四球形万向节球形凹槽底座(115)转动连接。3.根据权利2所述的一种光电相机姿态校正机器人,其特征在于:所述水平调整装置包括第一伺服电动推杆(101)、第二伺服电动推杆(109)、第三伺服电动推杆(110)、第四伺服电动推杆(111)、第一伺服电动推杆固定板(120)和第二伺服电动推杆固定板(114),所述第一伺服电动推杆(101)与第二伺服电动推杆(109)固定在第一伺服电动推杆固定板(120)上,第三伺服电动推杆(110)与第四伺服电动推杆(111)固定在第二伺服电动推杆固定板(114)上,所述第一球形万向节(104)的圆柱端与第一伺服电动推杆(101)的推杆固定连接,所述第二球形万向节(122)的圆柱端与第二伺服电动推杆(109)的推杆固定连接,所述第三球形万向节(118)的圆柱端与第三伺服电动推杆(110)固定连接,所述第四球形万向节(116)的圆柱端与第四伺服电动推杆(111)的推杆固定连接。4.根据权利3所述的一种光电相机姿态校正机器人,其特征在于:所述竖直调整装置包括第一连接块(105)、第二连接块(113)、第一微型丝杠(106)、第二微型丝杠(112)、上固定底座(107)、第一孔式旋转底座(108)和第二孔式旋转底座(123),第一伺服电动推杆固定板(120)与第一连接块(105)固定连接,第一连接块(105)设置在第一微型丝杠(106)中,第一连接块与第一微型丝杠(106)驱动连接,第二伺服电动推杆固定板(114)与第二连接块(113)固定连接,第二连接块(113)设置在第二微型丝杠(112)中,第二连接块(113)与第二微型丝杠(112)驱动连接,第一微型丝杠(106)与第二微型丝杠(112)固定在上固定底座(107)上,第一孔式旋转底座(108)与第二孔式旋转底座(123)固定在上固定底座(107)上。5.根据权利1所述的一种光电相机姿态校正机器人,其特征在于:所述下执行机构(2)包括第一横向丝杠(205)、第二横向丝杠(208)、第一纵向丝杠(211)、第二纵向丝杠(203)、第一轴式旋转底座(210)、第二轴式旋转底座(202)、第一丝杠连接板(204)、第二丝杠连接板(207)、第一轴承(209)、第二轴承(201)、卡槽箱(212)、卡槽箱盖板(213)和底座(206);所
述第一横向丝杠(205)与第二横向丝杠(208)固定在底座(206)上,第一丝杠连接板(204)与第一横向丝杠(205)的滑块固定连接,第二丝杠连接板(207)与第二横向丝杠(208)滑块固定连接,第一纵向丝杠(211)与第二纵向丝杠(203)的头部与第一丝杠连接板(204)固定连接,第一纵向丝杠(211)与第二纵向丝杠(203)的尾部与第二丝杠连接板(207)固定连接,第一轴式旋转底座(210)与第一纵向丝杠(211)的滑台固定连接,第二轴式旋转底座(202)与第二纵向丝杠(203)固定连接,卡槽箱(212)固定在底座(206)上,卡槽箱(212)设置有卡槽箱盖板(213),卡槽箱(212)与卡槽箱盖板(213)滑动连接。6.根据权利5所述的一种光电相机姿态校正机器人,其特征在于:上执行机构(1)中的第一孔式旋转底座(108)通过第一轴承(209)与下执行机构中的第一轴式旋转底座(210)转动连接,第二孔式旋转底座(123)通过第二轴承(201)与第二轴式旋转底座(202)转动连接。7.根据权利1所述的一种光电相机姿态校正机器人,其特征在于:所述机器人控制器(3)包括控制器壳体、电路板、控制按键和控制器显示屏(317),所述电路板设置在壳体内部,所述控制按键和控制器显示屏(317)设置在壳体上,所述控制器显示屏(317)和所述控制按键分别与电路板电连接,所述控制按键包括第一伺服电动推杆控制按键(301)、第二伺服电动推杆控制按键(302)、第三伺服电动推杆控制按键(303)、第四伺服电动推杆控制按键(304)、伺服电动推杆同步使能按键(305)、控制器使能按键(306)、第二微型丝杠控制按键(307)、第一微型丝杠控制按键(308)、微型丝杠同步使能按键(309)、第一纵向丝杠控制按键(310)、第二纵向丝杠控制按键(311)、纵向丝杠同步时能按键(312)、第一横向丝杠控制按键与第二横向丝杠控制按键(313)、控制器开关按键(314)、自动/手动切换按键(315)、复位按键(316)和急停按键(318)。
技术总结
本发明公开了一种光电相机姿态校正机器人,涉及相机校正技术领域。包括上执行机构,下执行机构和机器人控制器,所述上执行机构设置在下执行机构的上方,所述机器人控制器设置在下执行机构的外部,所述上执行机构、下执行机构均与机器人控制器电连接,所述上执行机构包括相机固定面板、角度调整关节、水平调整装置和竖直调整装置,所述角度调整关节的一端与所述相机固定面板的四角固定连接,所述角度调整关节的另一端与水平调整装置固定连接,所述水平调整装置设置在竖直调整装置上,所述竖直调整装置与下行控制机构转动连接。本发明自动化程度高,提高了光电相机的校正效率。提高了光电相机的校正效率。提高了光电相机的校正效率。
技术研发人员:张来刚 张云龙 赵岭 吕建军 杨凯栋 崔正大
受保护的技术使用者:聊城大学
技术研发日:2022.04.18
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。