1.本发明涉及预制箱梁安装技术领域,尤其是涉及一种小箱梁高低吊法安装施工方法。
背景技术:
2.预制梁是指在预制场或施工现场施工预制完成的梁,施工时通过吊装对预制梁进行安装,箱梁是预制梁的一种,内部呈空心状。现有的箱梁通常通过架桥机从需要朝着一个方向依次安装箱梁,需要桥梁下部结构连续,但实际施工情况复杂,桥梁下方可能会车辆通行而不适合搭设桥梁的下部结构。
技术实现要素:
3.本发明的目的在于至少解决现有技术中存在的技术问题之一,为此,本发明提出一种小箱梁高低吊法安装施工方法,能够在不连续的桥梁上运用架桥机完成箱梁的安装,施工时可不受地面交通、架空管线影响。
4.根据本发明实施例的小箱梁高低吊法安装施工方法,包括:
5.步骤1:组装架桥机,根据需要起吊的箱梁的重量,对架桥机进行选型,并通过汽车吊在两片盖梁顶部拼装架桥机,拼装完成后对架桥机进行调试和检验;
6.步骤2:在箱梁预制场内,通过龙门吊将箱梁搬运至运梁平板车的支座上,平板车将箱梁运输至施工现场,并将箱梁运输至喂梁位置;
7.步骤3:箱梁采用兜底吊,吊点位置为两端各距对应端面1.8m处,架桥机将箱梁起吊,起吊后平板车离开施工区域;
8.步骤4:在箱梁上设置第一触发器,在盖梁上设置第二触发器,第一触发器用于检测箱梁的倾斜程度,第二触发器用于检测箱梁相对于盖梁的位置;
9.步骤5:架桥机先将箱梁起吊至箱梁顶面距离盖梁底面50cm处,再将箱梁向后平移100cm,使箱梁的前端距离盖梁侧面约10cm;
10.步骤6:架桥机单独提升箱梁的前端,使箱梁倾斜直至触发了第一触发器,第一触发器出发后发出信号,架桥机根据第一触发器发出的信号驱动箱梁向前平移,直至触发第二触发器,架桥机根据第二触发器发出的信号单独提升箱梁的后端,直至再次出发第一触发器,使箱梁恢复水平;
11.步骤7:将箱梁横移至指定梁位,落梁到盖梁上,多片箱梁均从桥梁中间向左右两侧依次对称安装。
12.根据本发明实施例的小箱梁高低吊法安装施工方法,至少具有如下有益效果:第一触发器和第二触发器的设置一方面能够准确反映箱梁的实际位置和状态,避免因计算与实际情况不符而导致箱梁与盖梁发生碰撞,另一方面需要工程人员现场再对箱梁与盖梁之间的距离、箱梁的倾斜角度进行测量,提高施工效率,提高工程的精确到,同时降低工程人员的劳动强度,避免施工过程中测量所带来的危险。
13.根据本发明的一些实施例,一触发器固定在箱梁上,第一触发器包括有水平触发开关和倾斜触发开关,当箱梁由水平状态变为倾斜状态时,倾斜触发开关向架桥机发出信号,当箱梁由倾斜状态变为水平状态时,水平触发开关向架桥机发出信号。
14.根据本发明的一些实施例,第一触发器包括:第一壳体,第一壳体内设置有第一轨道,水平触发开关和倾斜触发开关分别置在第一轨道的两端;第一钢珠,第一钢珠可活动地设置在第一轨道内,当箱梁由水平状态变为倾斜状态时,第一钢珠沿第一轨道滚动至倾斜触发开关处,当箱梁由倾斜状态变为水平状态时,第一钢珠沿第一轨道滚动至水平触发开关处。
15.根据本发明的一些实施例,第二触发器可活动地设置在箱梁前侧的盖梁上,第二触发器包括平移触发开关,当箱梁向前移动时,箱梁与第二触发器相抵并带动第二触发器运动,当箱梁向前运动到位后,平移触发开关向架桥机发出信号。
16.根据本发明的一些实施例,第二触发器包括:第二壳体,第二壳体内设置有第二轨道,平移触发开关设置在第二轨道的一端;第二钢珠,第二钢珠可活动地设置在第二轨道内,当箱梁向前运动到位后,第二钢珠沿第二轨道滚动至平移触发开关处。
17.根据本发明的一些实施例,在步骤1中,拼装架桥机包括:
18.步骤1.1:在两片盖梁顶部铺设行车钢轨,钢轨底部采用枕木和工字钢马凳作为支垫,支垫的间距不大于50cm,支垫的层数不多于3层;
19.步骤1.2:在钢轨两端设置限位挡块。
20.根据本发明的一些实施例,在步骤3中,架桥机起吊每一跨桥梁的第一片箱梁时,需要先进行试吊工作,检验架桥机支腿及行走钢轨安全性。
21.根据本发明的一些实施例,在步骤3中,架桥机起吊箱梁前,在盖梁顶面用墨线弹出箱梁的梁边线、梁端线、支座中心十字线和盖梁纵轴线。
22.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
23.下面结合附图和实施例对本发明进一步地说明:
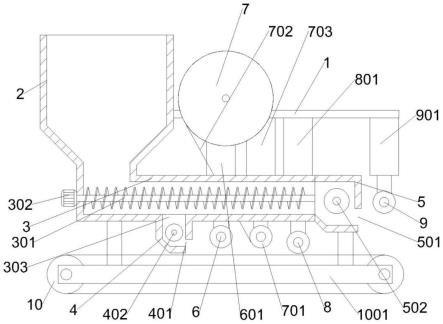
24.图1是本发明实施例的箱梁喂梁的结构示意图;
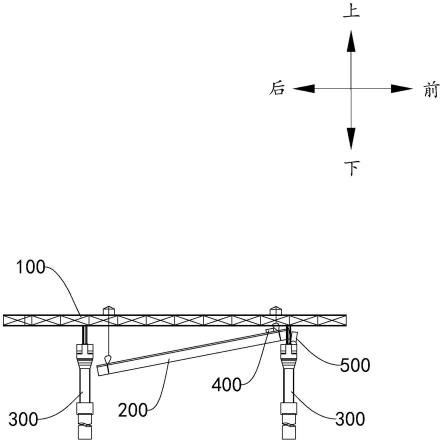
25.图2是图1中箱梁安装顺序图;
26.图3是本发明实施例中步骤5状态的结构示意图;
27.图4是本发明实施例中步骤6状态一的结构示意图;
28.图5是本发明实施例中步骤6状态二的结构示意图;
29.图6是本发明实施例中步骤7状态的结构示意图;
30.图7是图3中第一触发器的内部结构示意图;
31.图8是图4中第一触发器的内部结构示意图;
32.图9是图4中第二触发器的内部结构示意图;
33.图10是图5中第二触发器的内部结构示意图。
34.附图标记:
35.架桥机100;箱梁200;盖梁300;第一触发器400;第一壳体410;第一轨道420;水平
触发开关430;倾斜触发开关440;第一钢珠450;第二触发器500;第二壳体510;第二轨道520;平移触发开关530;第二钢珠540。
具体实施方式
36.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
37.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
39.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
40.参考图1至图10描述根据本发明实施例的小箱梁高低吊法安装施工方法。
41.如图1至图10所示,根据本发明实施例的小箱梁高低吊法安装施工方法包括:步骤1:组装架桥机100,根据需要起吊的箱梁200的重量,对架桥机100进行选型,并通过汽车吊在两片盖梁300顶部拼装架桥机100,拼装完成后对架桥机100进行调试和检验;
42.步骤2:在箱梁200预制场内,通过龙门吊将箱梁200搬运至运梁平板车的支座上,平板车将箱梁200运输至施工现场,并将箱梁200运输至喂梁位置;
43.步骤3:箱梁200采用兜底吊,吊点位置为两端各距对应端面1.8m处,架桥机100将箱梁200起吊,起吊后平板车离开施工区域;
44.步骤4:在箱梁200上设置第一触发器400,在盖梁300上设置第二触发器500,第一触发器400用于检测箱梁200的倾斜程度,第二触发器500用于检测箱梁200相对于盖梁300的位置;
45.步骤5:架桥机100先将箱梁200起吊至箱梁200顶面距离盖梁300底面50cm处,再将箱梁200向后平移100cm,使箱梁200的前端距离盖梁300侧面约10cm;
46.步骤6:架桥机100单独提升箱梁200的前端,使箱梁200倾斜直至触发了第一触发器400,第一触发器400出发后发出信号,架桥机100根据第一触发器400发出的信号驱动箱梁200向前平移,直至触发第二触发器500,架桥机100根据第二触发器500发出的信号单独提升箱梁200的后端,直至再次出发第一触发器400,使箱梁200恢复水平;
47.步骤7:将箱梁200横移至指定梁位,落梁到盖梁300上,多片箱梁200均从桥梁中间向左右两侧依次对称安装。
48.如图3至图6所示,第一触发器400固定在箱梁200上,第一触发器400包括有水平触发开关430和倾斜触发开关440,当箱梁200由水平状态变为倾斜状态时,倾斜触发开关440
向架桥机100发出信号,当箱梁200由倾斜状态变为水平状态时,水平触发开关430向架桥机100发出信号。第二触发器500可活动地设置在箱梁200前侧的盖梁300上,第二触发器500包括平移触发开关530,当箱梁200向前移动时,箱梁200与第二触发器500相抵并带动第二触发器500运动,当箱梁200向前运动到位后,平移触发开关530向架桥机100发出信号。
49.如图7和图10所示,第一触发器400包括:第一壳体410,第一壳体410内设置有第一轨道420,水平触发开关430和倾斜触发开关440分别置在第一轨道420的两端;第一钢珠450,第一钢珠450可活动地设置在第一轨道420内,当箱梁200由水平状态变为倾斜状态时,第一钢珠450沿第一轨道420滚动至倾斜触发开关440处,当箱梁200由倾斜状态变为水平状态时,第一钢珠450沿第一轨道420滚动至水平触发开关430处。第二触发器500包括:第二壳体510,第二壳体510内设置有第二轨道520,平移触发开关530设置在第二轨道520的一端;第二钢珠540,第二钢珠540可活动地设置在第二轨道520内,当箱梁200向前运动到位后,第二钢珠540沿第二轨道520滚动至平移触发开关530处。
50.可以想到的是,还可以采用其他常见的传感方式检测箱梁200的倾斜程度和位置,并向架桥机100发送信号,例如在箱梁200和盖梁300上设置光电传感器等,箱梁200位置和倾斜角度的检测装置和检测方式对于本领域的技术人员是可以理解的。
51.在步骤六中,架桥机100先单独提升箱梁200的前端,使箱梁200从图3所示的水平状态变为图4所示的倾斜状态,由于第一触发器400固定在箱梁200上,因此第一触发器400随着箱梁200的倾斜而倾斜,第一触发器400也从图7的状态变为图8的状态,第一触发器400中的第一钢珠450受自身重力作用,沿着第一轨道420向后运动,并最终抵达第一轨道420的后端,触发倾斜触发开关440,使第一触发器400向架桥机100发送信号,架桥机100停止对箱梁200前端的提升,在保持箱梁200倾斜状态的情况下,驱动箱梁200向前平移,使箱梁200从图4所示的状态变为图5所示的状态,箱梁200在前进的过程中,前端与第二触发器500相抵,推动第二触发器500转动,使第二触发器500从图9的状态变为图10的状态,第二触发器500中的第二钢珠540受自身重力作用,沿着第二轨道520向下运动,并最终抵达第二轨道520的下端,触发平移触发开关530,第二触发器500向架桥机100发出信号,使箱梁200停止向前平移,且架桥机100单独提升箱梁200的后侧,直至第一触发器400从图8的状态变为图7的状态,第一触发器400中的第一钢珠450受重力作用,沿第一轨道420向前运动,并最终抵达第一轨道420的前端,触发水平触发开关430,使第一触发器400再次向架桥机100发送信号,此时箱梁200恢复水平状态,架桥机100将箱梁200横移至指定梁位,落梁到盖梁300上,最终到达如图6所示的状态。
52.如图3至图6所示,从喂梁位置开始,架桥机100先将箱梁200平移提升,并向后平移100cm,使箱梁200的前端距离盖梁300侧面约10cm,由此保证箱梁200的前端能跃过盖梁300顶;接着单独提升箱梁200的前端,箱梁200从水平状态改变为倾斜状态,倾斜角度为11
°
,由此使箱梁200前后两端的水平距离缩小,并使箱梁200前端先跃过盖梁300顶;接着架桥机100将箱梁200向前平移1m,使箱梁200的后端距离量盖侧面约10cm,由此保证箱梁200的后端能跃过盖梁300顶;接着单独提升箱梁200后端,使箱梁200恢复水平状态,至此整个箱梁200顺利穿过两个盖梁300的盖梁300顶。最后架桥机100在通过将箱梁200落梁到盖梁300上。第一触发器400和第二触发器500检测箱梁200的倾斜状态和位置状态,当箱梁200倾斜到位和平移到位后向架桥机100发出信号,使架桥机100进行下一阶段的动作。第一触发器
400和第二触发器500的设置一方面能够准确反映箱梁200的实际位置和状态,避免因计算与实际情况不符而导致箱梁200与盖梁300发生碰撞,另一方面需要工程人员现场再对箱梁200与盖梁300之间的距离、箱梁200的倾斜角度进行测量,提高施工效率,提高工程的精确到,同时降低工程人员的劳动强度,避免施工过程中测量所带来的危险。第一触发器400和第二触发器500的结构可靠,不易受外界环境的影响,能够准确稳定地监测箱梁200的位置和倾斜程度。
53.在步骤1中,拼装架桥机100包括:在两片盖梁300顶部铺设行车钢轨,钢轨底部采用枕木和工字钢马凳作为支垫,支垫的间距不大于50cm,支垫的层数不多于3层;在钢轨两端设置限位挡块。
54.在步骤3中,架桥机100起吊每一跨桥梁的第一片箱梁200时,需要先进行试吊工作,检验架桥机100支腿及行走钢轨安全性。架桥机100起吊箱梁200前,在盖梁300顶面用墨线弹出箱梁200的梁边线、梁端线、支座中心十字线和盖梁300纵轴线。
55.下面以一个具体的实施例说明本小箱梁高低吊法安装施工方法:
56.架桥机100组装:需要安装35m的箱梁200,箱梁200最大吊装重量为127t,架桥机100起重重量要求为至少158.75t,因此采用设计最大跨径40m,设计最大起重重量160t的型号为hzq40/160双导梁架桥机100进行安装作业。架桥机100在首孔2片盖梁300顶上采用两台50t汽车吊进行拼装。首先在两片盖梁300顶部铺设行车钢轨,钢轨底部采用枕木和工字钢马凳进行支垫,间距不大于50cm,支垫层数不多于3层。钢轨两端设置限位挡块,确保钢轨顶面水平、顺直。架桥机100组装完调试好后,即可进行报检工作。经特种设备检测部门检验合格后方可进行吊装作业。
57.箱梁200装车、运输:采用龙门吊装在运梁平板车上,平板车支点必须靠近梁端,避免发生断裂。箱梁200在平板车上必须锁好,防止移动,车尾梁端悬挂警示牌。梁顶和支座位置杂物清扫干净,防止掉落砸伤他物。装梁前必须认真复核伸缩缝位置、调平快方向和其他预埋件等,防止出错导致无法安装。箱梁200运输到施工现场后,第一车直接停止在喂梁位置,其他车辆服从车辆指挥员安排停止在距安装位50m外的道路右侧,运输车按安装梁编号停放,并编号顺序开进喂梁指定地点。箱梁200的安装顺序如图2所示,十片箱梁200依次从从桥梁中间向左右两侧依次对称安装。
58.箱梁200试吊:每孔第一片梁需做试吊工作,检验架桥机100支腿及行走钢轨安全性。第一片梁起吊到支座顶面20cm后,架桥机100将平移,左右幅各平移一遍,平移过程中前端、后端负责人将全程跟踪检查,若出现问题立即停止平移,并上报指挥员,进行整改。
59.喂梁:运梁车停滞在每跨行车道上,每跨直接喂梁,小箱梁200采用兜底吊,吊点位置为两端各1.8m处;箱梁200起吊后,平板拖车及时离开施工区域。箱梁200安装前在盖梁300顶用墨线弹出梁边线、梁端线、支座中心十字线、盖梁300纵轴线。
60.起吊:架桥机100先将箱梁200起吊至箱梁200顶面距离盖梁300底面50cm处,再将箱梁200向后平移100cm,使箱梁200的前端距离盖梁300侧面约10cm;架桥机100单独提升箱梁200的前端,使箱梁200倾斜直至触发了第一触发器400,第一触发器400出发后发出信号,架桥机100根据第一触发器400发出的信号驱动箱梁200向前平移,直至触发第二触发器500,架桥机100根据第二触发器500发出的信号单独提升箱梁200的后端,直至再次出发第一触发器400,使箱梁200恢复水平;将箱梁200横移至指定梁位,落梁到盖梁300上,十片箱
梁200均从桥梁中间向左右两侧依次对称安装。
61.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。