1.本发明涉及智能扫雪技术领域,更具体地说,涉及一种智能扫雪机器人。本发明还涉及一种应用于智能扫雪机器人的智能扫雪方法。
背景技术:
2.随着自动化技术的不断发展,扫雪设备已经完成由清雪铲到手扶式扫雪机的过渡,目前正处于手扶式扫雪机到扫雪机器人的过渡阶段。
3.cn201710548414公开了一种全自动扫雪机,包括机架本体、驱动机构、安装在所述机架本体上的第一驱动组件,以及所述第一驱动组件是相对应的第二驱动组件;集雪组件,安装在所述机架本体的底部并用于采集积雪;抛雪机构,为集置在所述机架本体上用于确定位置的定位模块,以及用于规避障碍物的避障雪组件对应并转动安装在所述机架本体上;控制机构,包括设模块。
4.然而,现有技术中的上述全自动扫雪机,当绞龙在运转过程中前方喂雪口出现活体(人或者其他小动物)无法让绞龙停下,会带来安全隐患。扫雪机在运行过程中抛雪口的位置是人为调节的,缺少对紧急突发情况(抛雪口位置有人经过)的识别和处理能力,越障能力不足。因此,其智能化程度低、安全性能不完善、仿形越障能力不足。
技术实现要素:
5.本发明提供一种智能扫雪机器人,解决了现有技术中的扫雪设备智能化程度低、安全性能不完善及仿形越障能力不足的技术问题。本发明还提供一种应用于智能扫雪机器人的智能扫雪方法,实现了智能化扫雪。
6.本发明提供一种智能扫雪机器人,包括:
7.底盘行走模块,用以实现整机行走;
8.安全防护模块,用以对机器周围的障碍物做出判别响应以及对机器前端的活物进行检测;
9.智能抛雪巡视模块,用以对抛雪口出雪范围内进行活体检测;
10.工作执行模块,用以对地表雪进行清理;
11.仿形越障模块,用以实时检测地表地形并调节铲雪位置;
12.自动充电模块,用以实现低电量回充。
13.优选的,所述底盘行走模块包括起支撑作用的底盘、安装于所述底盘上且传动连接的主动轮机构、链传动张紧机构和从动轮机构,以及控制模块;
14.所述底盘包括侧面钢板,所述侧面钢板安装有后下底板、二层支撑底板、前下底板和前侧导雪板,所述后下底板和所述前下底板上安装有外罩,所述侧面钢板侧面安装有侧防撞条盖板和侧面盖板,所述外罩上安装有钥匙开关、急停按钮、电量数显模块和开关;
15.所述主动轮机构包括安装于所述侧面钢板的电机、连接于所述电机端部的减速器和主动包胶轮、主动轮限位垫片、主动轮轴向限位螺栓、主动轮轴承、主动轮轴承压轴、主动
链轮和主动链轮固定螺栓;
16.所述链传动张紧机构包括安装于所述侧面钢板上的张紧连杆回转轴、安装在张紧连杆回转轴上的张紧轮连杆、安装于所述张紧连杆回转轴和所述张紧轮连杆上的张紧轮扭簧、张紧轮链轮轴承座和通过张紧链轮卡簧固定于所述张紧轮链轮轴承座内部的张紧链轮轴承、固定安装于所述张紧链轮轴承座端面且连接于所述张紧轮连杆上的张紧链轮;
17.所述从动轮机构包括安装于所述侧面钢板的从动轮轴,所述从动轮轴上安装有第一从动轮轴承、从动包胶轮、第二从动轮轴承、安装于所述从动包胶轮外端面的从动链轮、安装于所述从动轮轴上的第二从动轮轴承压轴。
18.优选的,所述安全防护模块包括热释仪装置、安规防护装置和防撞装置;
19.所述热释仪装置包括安装于所述外罩的热释仪支架、安装于所述热释仪支架内部的热释仪模组、安装于所述热释仪支架前端的热释仪遮阳罩、安装于所述前下底板下方的安规导雪槽、安装于所述安规导雪槽上方的可调喂雪板;
20.防撞装置包括安装于所述侧面钢板的前防撞条支架、安装于所述前防撞条支架的前防撞条、前超声波支架、安装于所述前超声波支架中的前超声波、安装于所述侧面钢板上的侧面防撞条支架、安装于所述侧面防撞条支架上的侧防撞条以及安装于所述外罩上的侧超声波。
21.优选的,所述智能抛雪巡视模块包括抛雪口装置、驱动装置和二层立柱巡视装置;
22.所述抛雪口装置包括抛雪口本体、安装于所述抛雪口本体上的抛雪口本体压板、安装于所述抛雪口本体上端的抛雪口调节机构;
23.所述驱动装置包括安装于所述二层支撑底板上的驱动电机,以及通过主动齿轮压轴和主动齿轮限位螺栓安装于所述驱动电机上的主动齿轮;
24.所述二层立柱巡视装置包括安装于所述二层支撑底板下方的霍尔传感器、安装于所述二层支撑底板上方的二层旋转支撑轴承、安装于所述二层旋转支撑轴承上的二层旋转齿轮、用以固定所述二层旋转支撑轴承的二层旋转支撑板、安装于所述二层旋转支撑板上方的二层过度支撑、固定于所述二层旋转齿轮的上回转轴上的中间立柱、安装于所述二层过渡支撑上的外立柱支撑法兰、安装于所述外立柱支撑法兰上的外立柱、安装于所述外立柱上端部的定拨齿、动拨齿和用以将所述动拨齿安装于所述定拨齿上方的动拨齿压板;还包括导套、安装于所述动拨齿上方的相机外罩、相机本体、安装于所述相机支架上的相机补偿灯、用以安装所述相机支架的相机外罩上盖、粘连在所述相机外罩上的相机石英玻璃、安装于所述中间立柱上端的天线底板、安装于所述天线底板的二层控制板、安装于所述天线底板的红外相机支架、卡装于所述红外相机支架上的红外相机本体、天线固定板、安装于所述天线固定板上的天线本体、天线外罩支撑透明法兰和设置于所述天线外罩支撑透明法兰上方的天线外罩以及用以固定所述天线外罩的天线底板。
25.优选的,所述工作执行模块包括绞龙驱动电机连接板、绞龙驱动电机固定板、安装于所述绞龙驱动电机连接板和所述绞龙驱动电机固定板上的绞龙驱动电机、安装于绞龙驱动电机轴上的主动带轮、绞龙轴、安装于所述绞龙轴的从动带轮、用以向所述主动带轮和所述从动带轮传递动力的弹性多楔带、带传动防护罩、绞龙轴承座、通过绞龙卡簧固定在所述绞龙轴承座中的绞龙轴承,所述绞龙轴穿过蛟龙本体和所述绞龙轴承,所述绞龙轴承座安装在所述侧面钢板上。
26.优选的,所述仿形越障模块包括刮雪铲铲尖、刮雪铲铲尖连接螺栓、刮雪铲连杆轴、刮雪铲连杆锁紧螺母、刮雪铲扭簧挡圈、刮雪铲连杆扭簧、刮雪铲连杆轴固定螺栓、刮雪铲连杆和刮雪铲连杆限位板;所述刮雪铲铲尖通过刮雪铲铲尖连接螺栓固定在刮雪铲本体上,所述刮雪铲连杆轴通过刮雪铲连杆轴固定螺栓固定在所述侧面钢板上,所述刮雪铲连杆扭簧、所述刮雪铲连杆通过所述刮雪铲连杆锁紧螺母和所述刮雪铲扭簧挡圈固定在所述刮雪铲连杆轴上,所述刮雪铲连杆限位板安装在所述侧面钢板上,刮雪铲轴穿过刮雪铲扭簧、刮雪铲本体、刮雪铲翻转限位设置,刮雪铲锁紧螺母将所述刮雪铲轴固定在所述刮雪铲连杆上。
27.优选的,所述自动充电模块包括电池装置和充电机构;
28.所述电池装置包括电池包外罩、安装于所述电池包外罩内侧的隔热保温棉、粘贴于所述隔热保温棉内侧的电池包加热片、电池拔插盒、安装于所述电池拔插盒上的电池包、温度传感器和格兰头;
29.所述充电机构包括安装于所述后下底板上的充电块底座、安装于所述充电块底座上的铜支撑架、安装于所述铜支撑架的充电块铜支撑架、安装于所述充电块底座的铜导块、安装于所述铜导块的导柱、压簧、用以将所述铜导块安装于所述充电块底座上的固定螺栓及旋转轴、安装于所述旋转轴两端的扭簧、在充电块底座上的充电块上盖。
30.本发明还提供一种智能扫雪方法,应用于上述智能扫雪机器人,包括步骤:
31.开机预热:当雪深测量装置检测到下雪,并且雪深到达预设值时,所述自动充电模块预热升温至第一预设温度时断电,当温度低于第二预设温度时加热,并维持在预设温度范围之内;
32.导航行走:预热后,工作执行模块进行扫雪工作,通过智能抛雪巡视模块获取车体所在位置,底盘行走模块进行导航行走;
33.扫雪动作执行:当机器行走到雪地位置时,工作执行模块启动贴合地面清除地表积雪,当遇到障碍物时,仿形越障模块向后运行,越过障碍物后再复位运动;
34.安规防护和智能避障:当安全防护模块在工作中探测到探测范围内有活物时,触发紧急停车机制,重新规划路径,以便绕过障碍物进行工作;
35.智能巡视:通过智能抛雪巡视模块对周围环境进行监控,当探测抛雪口前方有活体时,转向无活物一侧进行抛雪作业;
36.自动回充:当机器电量低于预设电量时,自动充电模块启动低电量预警,底盘行走模块驱动机器进行回桩充电,自动充电模块对桩充电,当充电量达到100%时,充电桩自动断电;
37.继续工作:充满电后,机器会根据雪深测量装置在充电前和充电后返回的雪深信息进行处理,若预设时间段内无下雪,则回到初始回充点继续工作,若预设时间段内新增雪,则重复上述作业步骤。
38.本发明所提供的智能扫雪机器人,包括底盘行走模块、安全防护模块、智能抛雪巡视模块、工作执行模块、仿形越障模块和自动充电模块,实现无人化自动行走,对周围障碍物进行检测和前方喂雪口处活体进行检测,抛雪口可根据红外热成像相机反馈结果进行动态调节,可根据地表状态实现贴合工作和越障抬升,自动充电模块通过反馈电量信息,派发回充指令,实现自动回充,智能扫雪机器人安全性高,人性化程度高,适应性强,稳定高效,
是融合多项传感器技术的新型智能的扫雪设备,具有安全防护功能,提高了机器的安全性能,其抛雪口具有自主适应调节功能及仿形和越障功能,提高了机器的通过性和清雪能力,无需人员干预,自动清扫,实现真正意义上的智能化。
附图说明
39.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
40.图1为本发明具体实施例所提供的智能扫雪机器人的结构示意图;
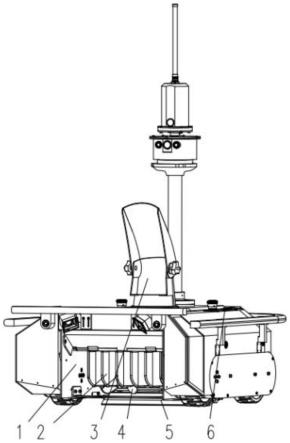
41.图2为本发明具体实施例所提供的智能扫雪机器人的另一个角度的结构示意图;
42.图3为图1的侧视图;
43.图4为图1中底盘模块的局部剖视图;
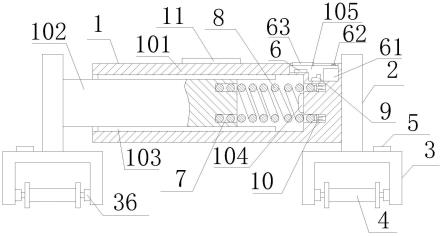
44.图5为图1的半剖图;
45.图6为图1中工作执行模块和仿形越障模块的结构示意图。
46.其中,1-底盘模块、2-安全防护模块、3-智能抛雪巡视模块、4-工作执行模块、5-仿形越障模块、6-自动充电模块;
47.11-底盘、12-主动轮机构、13-链传动张紧机构、14-从动轮机构、15-控制模块、21-热释仪装置、22-安规防护装置、23-防撞装置、31-抛雪口装置、32-驱动装置、33-二层立柱巡视装置、41-绞龙驱动装置、42-绞龙装置、51-前端刮雪板装置、52-刮雪铲仿形装置、61-电池装置、62-充电机构;
48.111-侧面钢板、112-后下底板、113-二层支撑底板、114-前下底板、115-前侧导雪板、116-外罩、117-侧防撞条盖板、118-侧面盖板、119-钥匙开关、1110-急停按钮、1111-电量数显模块、1112-开关、121-电机、122-减速器、123-主动轮电机连接螺栓、124-主动包胶轮、125-主动轮限位垫片、126-主动轮轴向限位螺栓、127-主动轮轴承、128-主动轮轴承压轴、129-主动链轮、1210-主动链轮固定螺栓、131张紧连杆回转轴、132-张紧链轮扭簧、133-张紧轮连杆、134-张紧轮连-杆限位垫片、135-张紧轮限位螺栓、136-张紧链轮轴承座、137-张紧链轮轴承、138-张紧链轮卡簧、139-张紧链轮垫片、1310-张紧链轮螺母、1311-张紧链轮、1312-张紧链轮固定螺栓、141-从动轮轴、142-从动轮轴固定螺栓、143-第一从动轮轴承、144-从动包胶轮、145-第二从动轮轴承、146-从动链轮、147-从动链轮连接螺栓、148-第二从动轮轴承压轴、149-从动轮压轴垫片、1410-从动轮压轴垫片固定螺栓、211-热释仪支架、212-热释仪模组、213-热释仪遮阳罩、214-热释仪连接螺栓、221-安规导雪槽、222-可调喂雪板、231-前防撞条支架连接螺栓、232-前防撞条支架、233-前防撞条、234-前防撞条连接螺栓、235-前超声波支架、236-前超声波连接螺栓、237-前超声波、238-侧防撞条支架、239-侧防撞条支架连接螺栓、2310-侧防撞条、2311-侧防撞条连接螺栓、2312-侧超声波、311-抛雪口本体、312-抛雪口本体压板、313-抛雪口本体压板固定螺栓、314-抛雪口调节锁紧螺母、315-抛雪口调节轴、316-抛雪口调节机构、321-驱动电机、322-驱动电机连接螺栓、323-主动齿轮、324-主动齿轮压轴、325-主动齿轮限位螺栓、331-霍尔传感器、332-二层旋转支撑轴承、333-二层旋转齿轮、334-二层旋转支撑板、335-二层过渡支撑、336-中间立柱、
337-中间立柱下锁紧螺母、338-外立柱、339-外立柱支撑法兰、3310-外立柱下锁紧螺母、3311-外立柱支撑法兰连接螺栓、3312-定拨齿、3313-外立柱上锁紧螺母、3314-动拨齿、3315-动拨齿压板、3316-动拨齿压板锁紧螺母、3317-导套、3318-相机外罩、3319-相机外罩链接螺栓、3320-相机本体、3321-相机补偿灯、3322-相机支架、3323-相机连接螺栓、3324-相机外罩上盖、3325-相机支架连接螺栓、3326-相机石英玻璃、3327-天线底板、3328-中间立柱上锁紧螺栓、3329-二层控制板、3330-二层控制板固定螺栓、3331-红外相机支架、3332-红外相机支架固定螺栓、3333-红外相机本体、3334-天线固定板、3335-天线本体、3336-天线固定螺栓、3337-天线外罩支撑透明法兰、3338-天线外罩、3339-天线外罩固定螺栓、411-绞龙驱动电机、412-绞龙驱动电机连接板、413-绞龙驱动电机固定螺栓、414-主动带轮、415-主动带轮锁紧螺栓、416-绞龙驱动电机过渡板、417-弹性多楔带、418-带传动防护罩、421-从动带轮、422-绞龙轴、423-绞龙轴垫圈、424-绞龙轴锁紧螺母、425-绞龙固定轴套、426-绞龙轴承、427-绞龙卡簧、428-绞龙轴承座、429-绞龙本体、511-前刮雪板、512-前刮雪板连接螺栓、521-刮雪铲铲尖、522-刮雪铲铲尖连接螺栓、523-刮雪铲连杆轴、524-刮雪铲连杆锁紧螺母、525-刮雪铲扭簧挡圈、526-刮雪铲连杆扭簧、527-刮雪铲连杆固定螺栓、528-刮雪铲连杆、529-刮雪铲连杆限板、5210-刮雪铲连杆轴、5211-刮雪铲连杆扭簧、5212-刮雪铲本体、5213-刮雪铲翻转限位、5214-刮雪铲锁紧螺母、611-电池包外罩、612-隔热保温棉、613-电池包加热片、614-电池拔插盒、615-电池包、616-温度传感器、617-格兰头、618-电池拔插盒连接螺栓、621-充电块底座、622-充电块铜支撑架、623-铜支架连接螺栓、624-铜导块、625-导柱、626-压簧、627-固定螺栓、628-旋转轴、629-扭簧、6210-充电块上盖、6211-充电块上盖固定螺栓。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.为了使本技术领域的技术人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
51.请参考图1,图1为本发明具体实施例所提供的智能扫雪机器人的结构示意图。
52.本发明提供一种智能扫雪机器人,包括底盘行走模块1,用以实现整机行走和支撑其它模块;安全防护模块2,用以对机器周围的障碍物做出判别响应以及对机器前端的活物进行检测;智能抛雪巡视模块3,用以对抛雪口出雪范围内进行活体检测;工作执行模块4,用以对地表雪进行清理;仿形越障模块5,用以实时检测地表地形并调节铲雪位置;自动充电模块6,用以实现低电量回充。
53.本技术兼具底盘行走模块1、安全防护模块2、智能抛雪巡视模块3、工作执行模块4、仿形越障模块5和自动充电模块6,底盘行走模块1可以实现无人化自动行走,对周围障碍物进行检测和前方喂雪口处活体进行检测,智能抛雪巡视模块3可以根据红外热线检测反馈结果进行动态调节,根据地表状态实现贴合工作和越障抬升;自动充电模块6通过反馈电量信息,派发回充指令,实现自动回充,智能扫雪机器人整个系统安全性高,设计更具人性
化,适应性强,运行稳定高效。
54.本发明融合了多传感器技术,实现对周围环境的实时动态反馈,提高机器运作的安全性;针对喂雪口前端采用红外热线技术进行活体检测和抛雪口自主调节,检测灵敏高效,提高机器的人性化,机器运行更加安全;此外,本发明具有仿形越障功能和自主导航及回桩充电功能,能够提高对地表雪的清理能力和自主越障能力,自动化程度高,真正实现无人化操作。
55.参考图2至图6,图2为本发明具体实施例所提供的智能扫雪机器人的另一个角度的结构示意图;图3为图1的侧视图;图4为图1中底盘模块的局部剖视图;图5为图1的半剖图;图6为图1中工作执行模块和仿形越障模块的结构示意图。
56.在具体实施例中,底盘行走模块1包括起支撑作用的底盘11、固定安装于底盘11上的主动轮机构12、链传动张紧机构13、从动轮机构14和控制模块15。
57.底盘11包括侧面钢板111,侧面钢板111上固定安装有后下底板112、二层支撑底板113、前下底板114和前侧导雪板115,后下底板112和前下底板114上安装有外罩116。侧面钢板111的侧面安装有侧防撞条盖板117和侧面盖板118,外罩116上设有钥匙开关119、急停按钮1110、电量数显模块1111和开关1112。
58.主动轮机构12包括通过主动轮电机连接螺栓123安装在侧面钢板111上的电机121,连接在电机121端部的减速器122和主动包胶轮124、主动轮限位垫片125、主动轮轴向限位螺栓126、主动轮轴承127、主动轮轴承压轴128、主动链轮129和主动链轮固定螺栓1210。电机121传出的驱动力经减速器122减速传输至主动包胶轮124和主动链轮129。
59.驱动力作用下,主动轮机构12和从动轮机构14通过链条传动实现整机行走功能,链传动张紧机构13使链条传动保持张紧状态,外罩116有效地保护行走模块,同时起安全防护作用。钥匙开关119和开关1112供启动和停机操作;按下急停按钮1110可以紧急停止整机运行;电量数显模块1111用以实时显示存余电量。
60.具体地,链传动张紧机构13包括张紧连杆回转轴131、张紧轮扭簧132、张紧轮连杆133、张紧轮连杆限位垫片134、张紧轮限位螺栓135、张紧轮链轮轴承座136、张紧链轮轴承137、张紧链轮卡簧138、张紧链轮垫片139、张紧链轮螺母1310、张紧链轮1311和张紧链轮固定螺栓1312。
61.张紧连杆回转轴131安装在侧面钢板111上,张紧轮扭簧132安装在张紧连杆回转轴131和张紧轮连杆133上,张紧轮连杆133安装在张紧轮回转轴131上,通过张紧轮连杆限位垫片134和张紧轮限位螺栓135对其固定,张紧轮链轮轴承座136内装有张紧链轮轴承137,通过张紧链轮卡簧138固定,张紧链轮1311通过张紧链轮固定螺栓1312连接在张紧链轮轴承座136端面,将装配完成的张紧链轮1311通过张紧链轮垫片139和张紧链轮螺母1310连接在张紧轮连杆133上。通过链传动张紧机构13对主动轮机构12和从动轮机构14进行张紧,确保精准传输。
62.在一种具体实施例中,从动轮机构14包括从动轮轴141、从动轮轴固定螺栓142、第一从动轮轴承143、从动包胶轮144、第二从动轮轴承145、从动链轮146、从动链轮连接螺栓147、第二从动轮轴承压轴148、从动轮压轴垫片149和从动轮压轴垫片固定螺栓1410。
63.具体地,从动轮轴141通过从动轮轴固定螺栓142固定在侧面钢板111上,第一从动轮轴承143、从动包胶轮144和第二从动轮轴承145安装在从动轮轴141上,从动链轮146通过
从动链轮连接螺栓147连接在从动包胶轮144的外端面,第二从动轮轴承压轴148通过从动轮压轴垫片149和从动轮压轴垫片固定螺栓1410固定在从动轮轴141上。
64.主动链轮129与从动链轮146通过链条连接,中部经张紧链轮1311张紧,电机121提供驱动力,再经减速器122减速后传输至主动链轮129,由主动链轮129通过链条传输至从动链轮146,实现整机行走功能。
65.通过智能抛雪巡视模块3中的天线本体3335获取车体所在位置,驱动电机121进行旋转,主动包胶轮124进行旋转,主动包胶轮124上的主动链轮129跟随主动包胶轮124同步工作,从动链轮146在主动链轮129的带动下进行转动,从动包胶轮144随从动链轮146一起转动,链传动张紧机构13对链条进行张紧,机器进行行走。通过对左右主动包胶轮124的差速控制,实现机器的直行和转弯。如此实现导航行走功能。
66.安全防护模块2主要包括热释仪装置21、安规防护装置22和防撞装置23。其中,热释仪装置21包括热释仪支架211、热释仪模组212、热释仪遮阳罩213、安规导雪槽221和可调喂雪板222。
67.热释仪支架211安装在外罩116上,热释仪模组212安装在热释仪支架211内,热释仪遮阳罩213通过热释仪连接螺栓214安装在热释仪支架211前端,热释仪模组212用以检测活体(人体、小动物等)热源的温度,热释仪遮阳罩213用以防护热释仪模组212,安规导雪槽221安装在前下底板114下方,可调喂雪板222安装在安规导雪槽221上方。
68.防撞装置23主要包括前防撞条支架232、前超声波支架235、前超声波237、侧面防撞条支架238、侧防撞条2310、外罩116和侧超声波2312。
69.通过在机器前端安装热释仪装置21和安规导雪槽221,热释仪装置21在机器工作中探测热源(人体、小动物等),当热源距离机器10cm~20cm,触发紧急停车机制,保证机器安全运转的同时,提高其对外界活体的感知力和保护,从而实现安规防护。
70.前防撞条支架232通过前防撞条连接螺栓231连接在侧面钢板111上,前防撞条233通过前防撞条连接螺栓234固定在前防撞条支架232上,前超声波237安装在前超声波支架235中,通过前超声连接螺栓236固定于前防撞条支架232上,侧面防撞条支架238通过侧面防撞条支架连接螺栓239固定在侧面钢111上,侧防撞条2310通过侧防撞条连接螺栓2311固定在侧面防撞条支架238上,侧超声波2312安装在外罩116上。
71.通过在机器前端和侧面设置超声波和防撞条,前超声波237和侧超声波2312用于对机器周围环境中的人和物等进行实时动态感知,前防撞条支架232和侧超声波2312构成机械式防护,用以防止机器与障碍物发生碰撞,同时有缓冲的效果。当机器前方或者侧面发现有障碍物时,机器会进行路径的重新规划,绕过障碍物进行工作,实现智能避障。
72.智能抛雪巡视模块3主要包括抛雪口装置31、驱动装置32和二层立柱巡视装置33。抛雪口装置31包括抛雪口本体311、安装于抛雪口本体311上的抛雪口本体压板312和安装于抛雪口本体311上端的抛雪口调节机构316。抛雪口本体压板312通过抛雪口本体压板固定螺栓313固定在抛雪口本体311上,抛雪口调节机构316通过抛雪口调节轴315和抛雪口调节锁紧螺母314固定在抛雪口本体311上端。
73.驱动装置32包括通过驱动电机连接螺栓322固定在二层支撑底板113上的驱动电机321,主动齿轮323通过主动齿轮压轴324和主动齿轮限位螺栓325固定在驱动电机321上。
74.二层立柱巡视装置33包括安装在二层支撑底板113下方的霍尔传感器331,安装在
二层支撑底板113上方的二层旋转支撑轴承332,二层旋转齿轮333安装在二层旋转支撑轴承332上,二层旋转支撑板334对安装在二层旋转齿轮333的上方轴承332起到固定的作用,二层旋转支撑板334上方安装有二层过度支撑335,中间立柱336通过中间立柱下锁紧螺母337固定在二层旋转齿轮333的上回转轴上,外立柱338通过外立柱下锁紧螺母3310固定在外立柱支撑法兰339上,外立柱法兰连接螺栓3311将外立柱支撑法兰339固定在二层过渡支撑335上,定拨齿3312通过外立柱上锁紧螺母3313固定在外立柱338上端部,动拨齿压板3315通过动拨齿压板锁紧螺母3316将动拨齿3314固定在定拨齿3312上方,导套3317将中间立柱336居中,相机外罩3318通过相机外罩连接螺栓3319固定在动拨齿3314上方,相机本体3320、相机补偿灯3321通过相机连接螺栓3323固定在相机支架3322上,相机支架连接螺栓3325将相机支架3322连接在相机外罩上盖3324上,相机石英玻璃3326粘连在相机外罩3318上,天线底板3327通过中间立柱上锁紧螺栓3328连接在中间立柱336上端,二层控制板3329通过二层控制板固定螺栓3330固定在天线底板3327上,红外相机支架3331通过红外相机支架固定螺栓3332固定在天线底板3327上,红外相机本体3333卡在红外相机支架3331上,天线本体3335通过天线固定螺栓3336安装在天线固定板3334上,天线外罩支撑透明法兰3337上方的天线外罩3338通过天线外罩固定螺栓3339固定在天线底板上。
75.机器上端的二层立柱巡视装置33上的红外相机本体3333通过中间立柱336下端的二层旋转齿轮333、主动齿轮323和抛雪口本体314上的齿轮形成联动系统,以保证红外相机本体3333所对的位置和抛雪口调节机构316所对的位置同步。机器运行中,红外相机本体3333感知抛雪口前方有无活体,如果有活体,抛雪口启动人性化智能旋转机制,在驱动电机321的带动下,抛雪口装置31和二层立柱巡视装置33进行同步运动,转向无活物一侧进行抛雪。二层立柱巡视装置33上的相机本体3320在相机补偿灯3321的辅助下,可以实现白天和晚上对机器周围环境进行监控。相机本体3320可以通过扳动动拨齿3314实现旋转运动,可以对机器四周进行全方位智能巡视,智能化程度高,可实现无人化作业。
76.工作执行模块4主要包括绞龙驱动电机连接板412、绞龙驱动电机固定板416、绞龙驱动电机411、主动带轮414、绞龙轴422、从动带轮421、弹性多楔带417、带传动防护罩418)、绞龙固定轴套425、绞龙轴承426和绞龙轴承座428。
77.绞龙驱动电机411通过绞龙驱动电机固定螺栓413固定在绞龙驱动电机连接板412上,主动带轮414通过主动带轮锁紧螺栓415固定在绞龙驱动电机411轴上,绞龙驱动电机固定板416起支撑作用,弹性多楔带417用于主动带轮414和从动带轮421之间动力传递,带传动防护罩418对带传动起保护作用。绞龙轴422上套设有绞龙固定轴套425,从动带轮421通过绞龙轴垫圈423和绞龙轴锁紧螺母424固定在绞龙轴422上,绞龙轴承426通过绞龙卡簧427固定在绞龙轴承座428中,绞龙轴422穿过蛟龙本体429和绞龙轴承426,绞龙轴承座428安装在侧面钢板111上。
78.当机器行走到雪地时,绞龙驱动电机411开启,主动带轮414在绞龙驱动电机411的带动下进行旋转,主动带轮414通过弹性多楔带417将动力传递给从动带轮421,从动带轮421带动绞龙轴422上的绞龙本体429进行旋转运动,绞龙本体429在旋转过程中将雪汇聚到中间进行抛洒,绞龙本体429下方的仿形越障模块5贴合地面进行工作,将地表雪进行清除干净。
79.仿形越障模块5包括刮雪铲铲尖521、刮雪铲铲尖连接螺栓522、刮雪铲连杆轴523、
刮雪铲连杆锁紧螺母524、刮雪铲扭簧挡圈525、刮雪铲连杆扭簧526、刮雪铲连杆轴固定螺栓527、刮雪铲连杆528和刮雪铲连杆限位板529、刮雪铲轴5210、刮雪铲扭簧5211、刮雪铲本体5212、刮雪铲翻转限位5213和刮雪铲锁紧螺母5214。
80.前刮雪板511通过前刮雪板连接螺栓512固定在侧面钢板111上。刮雪铲铲尖521通过刮雪铲铲尖连接螺栓522固定在刮雪铲本体5212上,刮雪铲连杆轴523通过刮雪铲连杆轴固定螺栓527固定在侧面钢板111上,刮雪铲连杆扭簧526、刮雪铲连杆528通过刮雪铲连杆锁紧螺母524和刮雪铲扭簧挡圈525固定在刮雪铲连杆轴523上,刮雪铲连杆限位板529安装在侧面钢板111上,刮雪铲轴5210穿过刮雪铲扭簧5211、刮雪铲本体5212、刮雪铲翻转限位5213,刮雪铲锁紧螺母5214将刮雪铲轴5210固定在刮雪铲连杆528上。
81.刮雪铲可以根据地表进行翻转贴合,地表雪残留少。当遇到小石头或者地表凸起等障碍物时,此时的力大于刮雪铲连杆扭簧526的扭力时,刮雪铲连杆528进行后旋运行,此时缩回刮雪铲,当越过障碍物时,在扭力的作用下,进行复位运动。前刮雪板511和安规导雪槽221对机器底部的稍大型障碍物有过滤效果。前侧导雪板115可以将机器前端的雪导入到机器底部,同时可以防止轮子正下方出现积雪,在保证稳定行走的情况下,提高作业效率。雪被绞龙本体429输送至抛雪口本体311,经过抛雪口调节机构316抛至机器侧面。
82.自动充电模块6包括电池装置61和充电机构62。其中,电池装置61包括电池包外罩611、隔热保温棉612、电池包加热片613、电池拔插盒614、电池包615、温度传感器616、格兰头617、充电块底座621、充电块铜支撑架622、铜支撑架623、铜导块624、导柱625、压簧626,固定螺栓627和旋转轴628、扭簧629和充电块上盖6210。
83.隔热保温棉612安装在电池包外罩611内侧,电池包加热片613粘贴在隔热保温棉612内侧,电池包615、温度传感器616和格兰头617安装在电池拔插盒614上,电池拔插盒614通过电池拔插盒连接螺栓618固定在后下底板112上。
84.充电块底座621固定在后下底板112上,充电块铜支撑架622通过铜支撑架623固定在充电底座621上,铜导块624上安装有导柱625、压簧626,固定螺栓627和旋转轴628将铜导块624固定在充电块底座621上,扭簧629安装在旋转轴628两端,充电块上盖6210通过充电快上盖固定螺栓6211固定在充电块底座621上。
85.智能扫雪机在充电桩上进行预热,电池包加热片613工作,在隔热保温棉612的防护下使得电池包615所在的空间内温度升高,当温度升高至25℃时,温度传感器616触发安全机制,对电池包加热片613进行断电;当温度低于20℃,重新开启电池包加热片613,使得电池包615所在的空间内温度维持在20℃~25℃。待机器完成预热后,即进行扫雪模式。
86.本发明具有自动回充功能:当机器电量到达25%时,启动低电量预警,机器进行回桩充电,到达充电桩附近,机器进行对桩充电,铜导块624具有自适应贴合功能,当机器停车到位以后,铜导块624会在压簧626和扭簧629的联合作用下进行仿形贴合调整,确保充电过程中,铜导块624贴合稳定,待充电量达到100%时,充电桩自动断电。
87.当机器充满电后,机器会根据雪深测量装置在充电前和充电后返回的雪深信息进行处理,若此时间段内无下雪,则回到初始回充点继续工作,若此时间段内新增雪,则重复上述作业流程。
88.本发明所提供的智能扫雪机器人,具有多传感器融合技术,环境感知效果好,能有效规避障碍物;机器底部的安规防护板和热释仪装置,可以有效起到对活体的保护;仿形越
障回弹可以有效避开底部小型障碍物;导航行走及回充功能精度高。
89.除此之外,本发明还提供一种智能扫雪方法,应用于上述智能扫雪机器人,具体包括如下步骤:
90.开机预热:当雪深测量装置检测到下雪,并且雪深到达预设值时,自动充电模块6预热升温至第一预设温度时断电,当温度低于第二预设温度时加热,并维持在预设温度范围之内;
91.导航行走:预热后,工作执行模块4进行扫雪工作,通过智能抛雪巡视模块3获取车体所在位置,底盘行走模块1进行导航行走;
92.扫雪动作执行:当机器行走到雪地位置时,工作执行模块4启动贴合地面清除地表积雪,当遇到障碍物时,仿形越障模块5向后运行,越过障碍物后再复位运动;
93.安规防护和智能避障:当安全防护模块2在工作中探测到探测范围内有活物时,触发紧急停车机制,重新规划路径,以便绕过障碍物进行工作;
94.智能巡视:通过智能抛雪巡视模块3对周围环境进行监控,当探测抛雪口前方有活体时,转向无活物一侧进行抛雪作业;
95.自动回充:当机器电量低于预设电量时,自动充电模块6启动低电量预警,底盘行走模块1驱动机器进行回桩充电,自动充电模块6对桩充电,当充电量达到100%时,充电桩自动断电;
96.继续工作:充满电后,机器会根据雪深测量装置在充电前和充电后返回的雪深信息进行处理,若预设时间段内无下雪,则回到初始回充点继续工作,若预设时间段内新增雪,则重复上述作业步骤。
97.具体地,开机后启动预热工序,当雪深测量装置检测到下雪,当雪深到达预设值(例如5cm、10cm、15cm、20cm)时,向智能扫雪机器人下发工作准备指令,智能扫雪机在充电桩上进行预热,自动充电模块6中的电池包加热片613进行工作,在隔热保温棉612的防护下使得电池包615所在的空间内温度升高,当温度升高至25℃时,温度传感器616触发安全机制,对电池包加热片613进行断电,当温度低于20℃,重新开启电池包加热片613,使得电池包615所在的空间内温度维持在20℃~25℃。
98.待机器完成预热模式后,执行导航行走模式:通过智能抛雪巡视模块3中的天线本体3335获取车体所在位置,底盘行走模块1中的驱动电机121进行旋转,主动包胶轮124进行旋转,主动包胶轮124上的主动链轮129跟随主动包胶轮124同步工作,从动链轮146在主动链轮129的带动下进行转动,从动包胶轮144随从动链轮146一起转动,底盘行走模块1中的链传动张紧机构13对链条进行张紧,机器进行行走。通过对左右主动包胶轮124的差速控制,实现机器的直行和转弯。
99.当机器行走到雪地时,执行扫雪动作:工作执行模块4中的绞龙驱动电机411开启,主动带轮414在绞龙驱动电机411的带动下进行旋转,主动带轮414通过弹性多楔带417将动力传递给从动带轮421,从动带轮421带动绞龙轴422上的绞龙本体429进行旋转运动,绞龙本体429在旋转过程中将雪汇聚到中间进行抛洒,绞龙本体429下方的刮雪铲仿形装置52贴合地面进行工作,将地表雪进行清除干净,当遇到障碍物(小石头或者地表凸起)时,此时的力大于仿形越障模块5中的刮雪铲连杆扭簧526的扭力时,刮雪铲连杆528进行后旋运行,此时缩回刮雪铲,当越过障碍物时,在扭力的作用下,进行复位运动。前刮雪板511和安规导雪
槽221对机器底部的稍大型障碍物有过滤效果。前侧导雪板115可以将机器前端的雪导入到机器底部,同时可以防止轮子正下方出现积雪,在保证稳定行走的情况下,提高作业效率。工作执行模块4中雪被绞龙本体429输送至抛雪口本体311,经过抛雪口调节机构316抛至机器侧面。
100.由于机器前端安装有安全防护模块2,其设有热释仪装置21和安规导雪槽221,热释仪装置21在机器工作中,如若发现热源(人体、小动物等),当热源距离机器10cm~20cm,触发紧急停车机制,保证机器安全运转的同时,提高其对外界活体的感知力和保护。在机器前端和侧面装有超声波和防撞条,通过超声波于对机器周围环境(人、物等)进行实时动态感知,防止机器与障碍物发生碰撞,防撞条在起防护和缓冲功能,当检测到机器前方或者侧面存在障碍物时,机器重新规划路径,绕过障碍物进行工作。
101.机器在运行中实现智能巡视:机器上端的智能抛雪巡视模块3中设有二层立柱巡视装置33,二层立柱巡视装置33设有红外相机本体3333,红外相机本体3333通过中间立柱336下端的二层旋转齿轮333、主动齿轮323和抛雪口本体314上的齿轮形成联动系统,保证红外相机本体3333所对的位置和抛雪口调节机构316所对的位置同步。机器在工作过程中,红外相机本体3333感知抛雪口前方有无活体,如果有活体,抛雪口启动人性化智能旋转机制,在驱动电机321的带动下,抛雪口装置31和二层立柱巡视装置33进行同步运动,转向无活物一侧进行抛雪。二层立柱巡视装置33上的相机本体3320在相机补偿灯3321的辅助下,可以实现白天和晚上对机器周围环境进行监控。相机本体3320可以通过扳动动拨齿3314实现旋转运动,可以对机器四周进行全方位监控。
102.在执行自动回充步骤时,当机器电量到达25%时,启动低电量预警,机器进行回桩充电,到达充电桩附近,机器进行对桩充电,铜导块624具有自适应贴合功能,当机器停车到位以后,铜导块624会在压簧626和扭簧629的联合作用下进行仿形贴合调整,确保充电过程中,铜导块624贴合稳定,待充电量达到100%时,充电桩自动断电。
103.当机器充满电后,机器会根据雪深测量装置在充电前和充电后返回的雪深信息进行处理,若此时间段内无下雪,则回到初始回充点继续工作,若此时间段内新增雪,则重复上述作业流程。
104.需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
105.以上对本发明所提供的智能扫雪机器人及智能扫雪方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。