1.本发明涉及磁性材料领域,尤其涉及一种机器人智能磁材分拣专机。
背景技术:
2.能对磁场作出某种方式反应的材料称为磁性材料,按照物质在外磁场中表现出来磁性的强弱,可将其分为抗磁性物质、顺磁性物质、铁磁性物质、反铁磁性物质和亚铁磁性物质,大多数材料是抗磁性或顺磁性的,它们对外磁场反应较弱;
3.目前,在对磁材进行分拣的过程中,由于磁石和胶垫下料后变得杂乱无章,且极易出现堆叠,进而造成后期分拣困难,而现有技术中,未及时的对磁石和胶垫进行预正位处理,无疑增加了分拣难度,同时磁石和胶垫在抓取过程中,未对其进行紧固处理,极易导致磁石和胶垫在移动过程中出现掉落现象,进而影响设备正常运作,影响工作效率,并且磁石和胶垫在放置过程中极易出现位移,若不及时进行正位处理,极易导致磁石和胶垫堆叠后出现错位,进而致使后期加工易造成报废,浪费大量资源。
4.综上,需要研发一种机器人智能磁材分拣专机,来克服上述问题。
技术实现要素:
5.为了克服磁石和胶垫下料后变得杂乱无章,且极易出现堆叠,未及时的进行正位,增加了分拣难度,同时磁石和胶垫在放置时极易出现位移,若不及时进行正位处理,极易导致堆叠后出现错位的缺点,本发明提供一种机器人智能磁材分拣专机。
6.技术方案:一种机器人智能磁材分拣专机,包括有安装架、电动机械爪、气泵和吸盘;安装架上表面左部和上表面右部各安装有一个电动机械爪;两个电动机械爪上均安装有一个气泵;气泵伸缩部均固接有一个吸盘;其特征是:还包括有紧固部件,紧固部件包括有连轴、连杆、吸板和限位条;两个吸盘中部各转动连接有两个连轴;每个连轴中部均固接有一个连杆;每个连杆上端均固接有一个吸板;每个连杆下端均固接有一个限位条。
7.进一步说明,每个连轴外侧均套有一个扭力弹簧,扭力弹簧的一端固接于吸盘,扭力弹簧的一端固接于连杆,用于使连轴转动复位。
8.进一步说明,限位条下表面等距设置有多个夹持条,用于进行夹持限位。
9.进一步说明,还包括有下料单元,下料单元包括有支撑架、底板、第一固定架、进料仓、导流板、传送带、底座和震动部件;滑杆、固定框、顶板、振动板、第一弹性件、衔接板、电动转轴、凸轮和压缩弹簧;支撑架上表面固接有底板;底板左部固接有第一固定架;第一固定架上部固接有两个进料仓;两个进料仓下部均固接有一个导流板;底板中部安装有两个传送带;两个导流板下部均连接有一个震动部件;两个震动部件均与底板连接。
10.进一步说明,震动部件包括有底座、滑杆、固定框、顶板、振动板、第一弹性件、衔接板、电动转轴、凸轮和压缩弹簧;底板左部固接有两个底座;两个底座各与一个导流板固接;两个底座上部各滑动连接有四个滑杆;左右相邻的四个滑杆之间各固接有一个固定框;两个固定框上表面均固接有一个顶板;两个顶板各与一个导流板滑动连接;两个顶板上端均
固接有一个振动板;两个固定框中部均固接有一个第一弹性件;两个第一弹性件中部均固接有一个衔接板;两个衔接板左部和右部各安装有一个电动转轴,左右相邻的两个电动转轴为一组;每个电动转轴前部和后部各固接有一个凸轮,且前后相邻的两个凸轮相互垂直九十度设置;每个滑杆外侧均套有一个压缩弹簧,压缩弹簧的一端固接于底座,另一端固接于固定框。
11.进一步说明,振动板设置有倾斜状,便于导流。
12.进一步说明,第一弹性件为弹簧杆。
13.进一步说明,检测单元包括有支柱、罩壳、摄像头、连接板和挡板;支柱设置有两个;两个支柱共同固接有罩壳;罩壳内壁上方安装有两个摄像头;罩壳左侧固接有连接板;连接板下表面等距固接有六个挡板。
14.进一步说明,挡板设置为橡胶材质。
15.进一步说明,转移单元包括有安装板、固定板、电动滑轨、电动滑块、下料柱和正位部件;底板前侧和后侧各固接有一个安装板;两个安装板上表面各固接有两个固定板;每个固定板上均固接有一个电动滑轨;每个电动滑轨上均滑动连接有一个电动滑块;每个电动滑块上表面均设置有一个下料柱;每个电动滑块上表面均连接有两个正位部件。
16.有益效果为:本发明实现了将磁石和胶垫传送至指定位置,而后再对磁石和胶垫进行预正位处理,并避免磁石和胶垫出现堆叠,接着对磁石和胶垫进行分拣,并在分拣时对其进行加固处理,进而避免在移动过程中出现掉落现象,而后再将磁石和胶垫依次堆叠放置,并对其进行正位处理,从而避免磁石在放置过程中极易出现位移,提高工作效率的同时避免了造成报废。
附图说明
17.图1展现的为本发明的机器人智能磁材分拣专机第一立体构造示意图;
18.图2展现的为本发明的机器人智能磁材分拣专机第二立体构造示意图;
19.图3展现的为本发明的机器人智能磁材分拣专机紧固部件第一立体构造示意图;
20.图4展现的为本发明的机器人智能磁材分拣专机紧固部件第二立体构造示意图;
21.图5展现的为本发明的机器人智能磁材分拣专机紧固部件第一局部剖视图;
22.图6展现的为本发明的机器人智能磁材分拣专机紧固部件第二局部剖视图;
23.图7展现的为本发明的机器人智能磁材分拣专机下料单元第一局部立体构造示意图;
24.图8展现的为本发明的机器人智能磁材分拣专机下料单元第二局部立体构造示意图;
25.图9展现的为本发明的机器人智能磁材分拣专机震动部件局部剖视图;
26.图10展现的为本发明的机器人智能磁材分拣专机震动部件局部立体构造示意图;
27.图11展现的为本发明的机器人智能磁材分拣专机检测单元立体构造示意图;
28.图12展现的为本发明的机器人智能磁材分拣专机转移单元立体构造示意图;
29.图13展现的为本发明的机器人智能磁材分拣专机转移单元第一局部立体构造示意图;
30.图14展现的为本发明的机器人智能磁材分拣专机转移单元第二局部立体构造示
意图。
31.以上附图中:1-支撑架,2-底板,3-第一固定架,4-安装架,301-电动机械爪,302-气泵,303-吸盘,304-连轴,305-连杆,306-吸板,307-限位条,401-进料仓,402-导流板,403-传送带,404-底座,405-滑杆,406-固定框,407-顶板,408-振动板,409-第一弹性件,410-衔接板,411-电动转轴,412-凸轮,413-压缩弹簧,501-支柱,502-罩壳,503-摄像头,504-连接板,505-挡板,601-安装板,602-固定板,603-电动滑轨,604-电动滑块,605-下料柱,606-第二固定架,607-限位块,608-第二弹性件。
具体实施方式
32.下面结合附图详细说明本发明的优选技术方案。
33.实施例1
34.一种机器人智能磁材分拣专机,根据图1-2所示,包括有安装架4、电动机械爪301、气泵302和吸盘303;安装架4上表面左部和上表面右部各安装有一个电动机械爪301;两个电动机械爪301上均安装有一个气泵302;气泵302伸缩部均固接有一个吸盘303;
35.其特征是:还包括有紧固部件,紧固部件包括有连轴304、连杆305、吸板306和限位条307;两个吸盘303中部各转动连接有两个连轴304;每个连轴304中部均固接有一个连杆305;每个连杆305上端均固接有一个吸板306;每个连杆305下端均固接有一个限位条307。
36.每个连轴304外侧均套有一个扭力弹簧,扭力弹簧的一端固接于吸盘303,扭力弹簧的一端固接于连杆305,用于使连轴304转动复位。
37.限位条307下表面等距设置有多个夹持条,用于进行夹持限位。
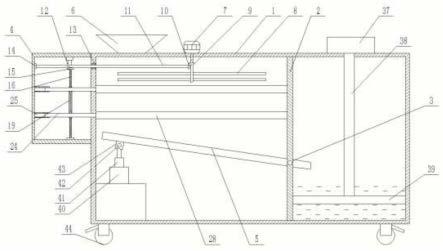
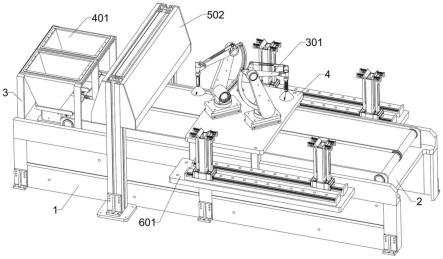
38.还包括有下料单元,下料单元包括有支撑架1、底板2、第一固定架3、进料仓401、导流板402、传送带403、底座404和震动部件;滑杆405、固定框406、顶板407、振动板408、第一弹性件409、衔接板410、电动转轴411、凸轮412和压缩弹簧413;支撑架1上表面螺栓连接有底板2;底板2左部焊接有第一固定架3;第一固定架3上部螺栓连接有两个进料仓401;两个进料仓401下部均固接有一个导流板402;底板2中部安装有两个传送带403;两个导流板402下部均连接有一个震动部件;两个震动部件均与底板2连接。
39.震动部件包括有底座404、滑杆405、固定框406、顶板407、振动板408、第一弹性件409、衔接板410、电动转轴411、凸轮412和压缩弹簧413;底板2左部固接有两个底座404;两个底座404各与一个导流板402固接;两个底座404上部各滑动连接有四个滑杆405;左右相邻的四个滑杆405之间各固接有一个固定框406;两个固定框406上表面均固接有一个顶板407;两个顶板407各与一个导流板402滑动连接;两个顶板407上端均固接有一个振动板408;两个固定框406中部均固接有一个第一弹性件409;两个第一弹性件409中部均固接有一个衔接板410;两个衔接板410左部和右部各安装有一个电动转轴411,左右相邻的两个电动转轴411为一组;每个电动转轴411前部和后部各固接有一个凸轮412,且前后相邻的两个凸轮412相互垂直九十度设置;每个滑杆405外侧均套有一个压缩弹簧413,压缩弹簧413的一端固接于底座404,另一端固接于固定框406。
40.振动板408设置有倾斜状,便于导流。
41.第一弹性件409为弹簧杆。
42.检测单元包括有支柱501、罩壳502、摄像头503、连接板504和挡板505;支柱501设
置有两个;两个支柱501共同固接有罩壳502;罩壳502内壁上方安装有两个摄像头503;罩壳502左侧固接有连接板504;连接板504下表面等距固接有六个挡板505。
43.挡板505设置为橡胶材质。
44.转移单元包括有安装板601、固定板602、电动滑轨603、电动滑块604、下料柱605和正位部件;底板2前侧和后侧各焊接有一个安装板601;两个安装板601上表面各固接有两个固定板602;每个固定板602上均固接有一个电动滑轨603;每个电动滑轨603上均滑动连接有一个电动滑块604;每个电动滑块604上表面均设置有一个下料柱605;每个电动滑块604上表面均连接有两个正位部件。
45.正位部件包括有第二固定架606、限位块607和第二弹性件608;每个电动滑块604上表面均固接有两个第二固定架606;每个第二固定架606上部均滑动连接有一个限位块607;每个第二固定架606与限位块607之间均固接有两个第二弹性件608。
46.第二弹性件608为弹簧杆。
47.在进行工作时,由人工预先将胶垫和未充磁的磁石各放置在一个进料仓401内,充磁的磁石以下简称为磁石,此时磁石和胶垫各落在一个振动板408上表面,接着两组电动转轴411启动,并且左右相邻的两个电动转轴411转向相反,两个电动转轴411转动带动四个凸轮412转动,此时四个凸轮412转动产生离心力使得衔接板410上下往复移动,进而压缩第一弹性件409,同时四个凸轮412转动产生离心力使得固定框406左右往复移动,固定框406左右往复移动带动四个滑杆405左右往复移动,进而压缩四个压缩弹簧413,同时固定框406往复移动带动顶板407移动,顶板407移动带动振动板408移动,进而使得振动板408上的磁石落下,并通过导流板402落在传送带403上,接着传送带403启动运作进而带动磁石往右移动,同时胶垫以相同的工作原理往右移动;
48.接着磁石和胶垫同步往右移动,当移动至罩壳502下方时,由于磁石和胶垫落下后变得杂乱无章,且极易出现堆叠,此时当磁石和胶垫往右移动通过挡板505时,利用挡板505对磁石和胶垫进行预正位处理,并避免磁石和胶垫出现堆叠,接着当磁石和胶垫通过挡板505后,两个摄像头503启动运作,此时两个摄像头503运作分别将磁石和胶垫的位置信息通过信号传输至两个电动机械爪301,而后两个电动机械爪301启动通过接收到的位置信号将磁石和胶垫放置在下料柱605内,此时电动机械爪301在抓取过程中,一个电动机械爪301启动带动气泵302移动至磁石上方,接着气泵302启动运作带动吸盘303将一块磁石吸住,进而将其夹持住,同时气泵302运作时产生的吸力带动两个吸板306往上进行翻转,即两个吸板306各以一个连轴304为轴往上翻转,此时两个吸板306翻转带动两个连杆305转动,两个连杆305转动带动两个限位条307相向转动,进而通过两个限位条307对磁石进一步进行夹持,进而使得抓取更加牢固,接着将一块磁石放置在下料柱605内后,一个电动机械爪301以相同的工作原理抓取一个胶垫,并将胶垫叠放在磁石的上表面,而后再以相同的工作原理在胶垫的上表面叠放一块磁石,依次循环往复叠放,直至将一个下料柱605堆满,同时另一个电动机械爪301以相同的工作原理进行运作,从而完成分拣工作;
49.同时电动机械爪301在放置过程中极易出现位移,进而使得磁石和胶垫堆叠后出现错位,当磁石移动至下料柱605的上方时,气泵302停止运作,此时磁石往下移动触碰到两个限位块607并对其造成挤压,进而对四个第二弹性件608造成挤压,此时通过两个限位块607产生相对的力对磁石进行正位处理,从而避免磁石在放置过程中极易出现位移,当一个
下料柱605堆满后,电动滑块604启动沿着电动滑轨603移动,电动滑块604移动带动下料柱605移动,进而将堆满磁石和胶垫的下料柱605移动至电动滑轨603的最右端,而后再通过外设机械臂将堆满磁石和胶垫的下料柱605取出,同时当一个下料柱605堆满后,相邻的另一个下料柱605将以相同的工作原理移动至电动滑轨603的左端,从而继续堆放磁石和胶垫,从而提高工作效率。
50.尽管已经仅相对于有限数量的实施方式描述了本公开,但是受益于本公开的本领域技术人员将理解,在不脱离本发明的范围的情况下,可以设计各种其他实施方式。因此,本发明的范围应仅由所附权利要求限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。