1.本实用新型涉及机器人技术领域,具体为一种仿生机器人用行走机构。
背景技术:
2.仿生机器人近些年来由于其具备伪装性强、机动性能好的特点受到越来越多研究者的关注。通常我们在探索一些未知环境的时候是通过传统的移动机器人来完成,传统的移动机器人通常为轮式机器人和履带式机器人,它们虽然可以较轻松的完成一部分任务。但是面对一些情况复杂的未知环境,如在密林深处中的拍摄任务,普通移动机器人不仅正常行进不便,并且还会惊扰拍摄生物。这无疑增加了任务的时间与难度,伪装性差,灵活性弱的缺点就充分显现出来。可以灵活面对复杂地形的移动机器人成为当务之急。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种仿生机器人用行走机构,解决了上述背景技术中提出的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种仿生机器人用行走机构,包括机壳、第二轴承与第一轴承,所述机壳的底部设置有固定板,所述机壳的底部且位于固定板的一侧安装有限位板,所述机壳的两侧均安装有侧板,所述机壳上安装有电机架,所述电机架的输出端设置有驱动电机,所述驱动电机的一端设置有第一齿轮,所述固定板的内部均通过第二轴承连接有传动轴,所述传动轴的一端均延伸至限位板的另一侧,所述传动轴的数量设置为四根,一根所述传动轴的外侧设置有第三齿轮,另一根所述传动轴的外侧设置有第二齿轮,两根所述传动轴的外侧且位于第三齿轮与第二齿轮的一侧均套设有缺齿齿轮,一根所述传动轴的外侧套设有第四齿轮,剩余一根所述传动轴的外侧套设有第五齿轮,所述侧板的一侧均通过第一轴承连接有锥齿轮轴杆,所述锥齿轮轴杆的一端均套设有第二锥齿轮,两根所述传动轴的一端均套设有第一锥齿轮,所述锥齿轮轴杆的外侧均缠绕有卷绳,所述机壳的前后端均安装有两组跳跃机构。
5.优选的,所述跳跃机构包括后腿与前腿,所述前腿安装在机壳的前端,所述后腿由大腿、小腿、第二弹簧、脚掌与弹簧座组成,所述大腿安装在机壳后端,所述大腿的另一端设置有小腿,所述卷绳的一端与小腿相连接。
6.优选的,所述脚掌与小腿上均设置有弹簧座,且脚掌上的弹簧座内部均设置有第二弹簧与小腿上的弹簧座内部均设置有第一弹簧。
7.优选的,所述第一锥齿轮均与第二锥齿轮啮合连接。
8.优选的,所述第三齿轮与第二齿轮均与第一齿轮啮合连接。
9.优选的,所述第四齿轮与第五齿轮均和缺齿齿轮啮合连接。
10.本实用新型提供了一种仿生机器人用行走机构,具备以下有益效果:
11.该仿生机器人用行走机构,通过设置有缺齿齿轮、第一齿轮与后腿,通过仿生青蛙整体的结构设计,仅通过齿轮的传动等装置实现仿生跳跃,成本低,实用价值高,可开发性
强,从而提高了本机构的实用性,使得本机构方便进行使用。
附图说明
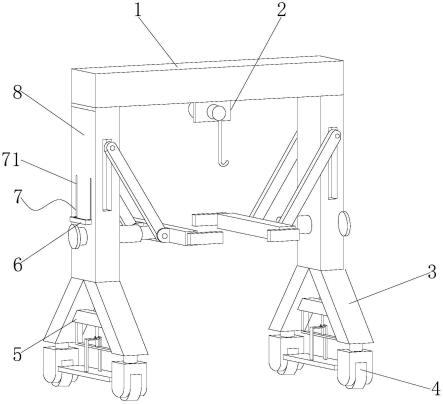
12.图1为本实用新型整体结构示意图;
13.图2为本实用新型侧视结构示意图;
14.图3为本实用新型后视结构示意图;
15.图4为本实用新型主视结构示意图;
16.图5为本实用新型仰视结构示意图;
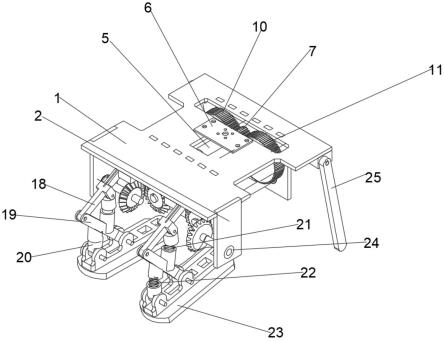
17.图6为本实用新型后部结构示意图。
18.图中:1、机壳;2、侧板;3、固定板;4、限位板;5、驱动电机;6、电机架;7、第一齿轮;9、传动轴;10、第二齿轮;11、第三齿轮;12、缺齿齿轮;13、第四齿轮;14、第五齿轮;15、第一锥齿轮;16、第二锥齿轮;17、锥齿轮轴杆;18、大腿;19、小腿;20、弹簧座;21、第一弹簧;22、第二弹簧;23、脚掌;24、第一轴承;25、前腿;26、卷绳;27、后腿;28、第二轴承。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.实施例一
21.请参阅图1至图6,本实用新型提供一种技术方案:一种仿生机器人用行走机构,包括机壳1、第二轴承28与第一轴承24,机壳1的底部设置有固定板3,机壳1的底部且位于固定板3的一侧安装有限位板4,机壳1的两侧均安装有侧板2,机壳1上安装有电机架6,电机架6的输出端设置有驱动电机5,驱动电机5的一端设置有第一齿轮7,固定板3的内部均通过第二轴承28连接有传动轴9,传动轴9的一端均延伸至限位板4的另一侧,传动轴9的数量设置为四根,一根传动轴9的外侧设置有第三齿轮11,另一根传动轴9的外侧设置有第二齿轮10,两根传动轴9的外侧且位于第三齿轮11与第二齿轮10的一侧均套设有缺齿齿轮12,一根传动轴9的外侧套设有第四齿轮13,剩余一根传动轴9的外侧套设有第五齿轮14,侧板2的一侧均通过第一轴承24连接有锥齿轮轴杆17,锥齿轮轴杆17的一端均套设有第二锥齿轮16,两根传动轴9的一端均套设有第一锥齿轮15,锥齿轮轴杆17的外侧均缠绕有卷绳26,机壳1的前后端均安装有两组跳跃机构。
22.跳跃机构包括后腿27与前腿25,前腿25安装在机壳1的前端,后腿27由大腿18、小腿19、第二弹簧22、脚掌23与弹簧座20组成,大腿18安装在机壳1后端,大腿18的另一端设置有小腿19,卷绳26的一端与小腿19相连接,通过后腿27与前腿25使得本机构能够进行跳跃,脚掌23与小腿19上均设置有弹簧座20,且脚掌23上的弹簧座20内部均设置有第二弹簧22与小腿19上的弹簧座20内部均设置有第一弹簧21,通过第一弹簧21与第二弹簧22能够进行跳跃,第一锥齿轮15均与第二锥齿轮16啮合连接,使得第一锥齿轮15能够带动第二锥齿轮16转动,第三齿轮11与第二齿轮10均与第一齿轮7啮合连接,使得第一齿轮7转动能够带动第三齿轮11与第二齿轮10转动,第四齿轮13与第五齿轮14均和缺齿齿轮12啮合连接,使得缺齿齿轮12能够带动第四齿轮13与第五齿轮14转动。
23.综上,该仿生机器人用行走机构,使用时,通过驱动电机5驱动使第一齿轮7转动,带动第三齿轮11与第二齿轮10转动,使得传动轴9带动缺齿齿轮12转动,使得第四齿轮13转动,使得第四齿轮13带动传动轴9转动,使得第一锥齿轮15带动第二锥齿轮16转动,使得第二锥齿轮16控制卷绳26在锥齿轮轴杆17上的缠绕圈数,进而压缩固定在弹簧座20上的第二弹簧22与第一弹簧21,当缺齿齿轮12的缺齿部分和第四齿轮13与第五齿轮14为无啮合状态时,到达释放位置,此时第一锥齿轮15与第二锥齿轮16停止转动,卷绳26停止收缩,第二弹簧22与第一弹簧21释放,实现跳跃。
24.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种仿生机器人用行走机构,包括机壳(1)、第二轴承(28)与第一轴承(24),其特征在于:所述机壳(1)的底部设置有固定板(3),所述机壳(1)的底部且位于固定板(3)的一侧安装有限位板(4),所述机壳(1)的两侧均安装有侧板(2),所述机壳(1)上安装有电机架(6),所述电机架(6)的输出端设置有驱动电机(5),所述驱动电机(5)的一端设置有第一齿轮(7),所述固定板(3)的内部均通过第二轴承(28)连接有传动轴(9),所述传动轴(9)的一端均延伸至限位板(4)的另一侧,所述传动轴(9)的数量设置为四根,一根所述传动轴(9)的外侧设置有第三齿轮(11),另一根所述传动轴(9)的外侧设置有第二齿轮(10),两根所述传动轴(9)的外侧且位于第三齿轮(11)与第二齿轮(10)的一侧均套设有缺齿齿轮(12),一根所述传动轴(9)的外侧套设有第四齿轮(13),剩余一根所述传动轴(9)的外侧套设有第五齿轮(14),所述侧板(2)的一侧均通过第一轴承(24)连接有锥齿轮轴杆(17),所述锥齿轮轴杆(17)的一端均套设有第二锥齿轮(16),两根所述传动轴(9)的一端均套设有第一锥齿轮(15),所述锥齿轮轴杆(17)的外侧均缠绕有卷绳(26),所述机壳(1)的前后端均安装有两组跳跃机构。2.根据权利要求1所述的一种仿生机器人用行走机构,其特征在于:所述跳跃机构包括后腿(27)与前腿(25),所述前腿(25)安装在机壳(1)的前端,所述后腿(27)由大腿(18)、小腿(19)、第二弹簧(22)、脚掌(23)与弹簧座(20)组成,所述大腿(18)安装在机壳(1)后端,所述大腿(18)的另一端设置有小腿(19),所述卷绳(26)的一端与小腿(19)相连接。3.根据权利要求2所述的一种仿生机器人用行走机构,其特征在于:所述脚掌(23)与小腿(19)上均设置有弹簧座(20),且脚掌(23)上的弹簧座(20)内部均设置有第二弹簧(22)与小腿(19)上的弹簧座(20)内部均设置有第一弹簧(21)。4.根据权利要求1所述的一种仿生机器人用行走机构,其特征在于:所述第一锥齿轮(15)均与第二锥齿轮(16)啮合连接。5.根据权利要求1所述的一种仿生机器人用行走机构,其特征在于:所述第三齿轮(11)与第二齿轮(10)均与第一齿轮(7)啮合连接。6.根据权利要求1所述的一种仿生机器人用行走机构,其特征在于:所述第四齿轮(13)与第五齿轮(14)均和缺齿齿轮(12)啮合连接。
技术总结
本实用新型公开了一种仿生机器人用行走机构,涉及机器人技术领域,包括机壳、第二轴承与第一轴承,所述机壳的底部设置有固定板,所述机壳的底部且位于固定板的一侧安装有限位板,所述机壳的两侧均安装有侧板,所述机壳上安装有电机架,所述电机架的输出端设置有驱动电机,所述驱动电机的一端设置有第一齿轮,所述固定板的内部均通过第二轴承连接有传动轴,该仿生机器人用行走机构,通过设置有缺齿齿轮、第一齿轮与后腿,通过仿生青蛙整体的结构设计,仅通过齿轮的传动等装置实现仿生跳跃,成本低,实用价值高,可开发性强,从而提高了本机构的实用性,使得本机构方便进行使用。使得本机构方便进行使用。使得本机构方便进行使用。
技术研发人员:李士明 沈中凯 刘思雪 张绪淦 刘铭昊 陈宜成 张子儒
受保护的技术使用者:湖北理工学院
技术研发日:2022.05.09
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。