1.本发明涉及一种抓持装置。
背景技术:
2.以往,为了削减生产成本、稳定品质等而推进了生产线的自动化,由机器人实现的自动化因其通用性而被导入至许多生产线。该机器人中对部件等工件进行抓持的抓持装置具备:抓持部,具有多个爪部;以及驱动部,对该多个爪部进行驱动(例如,参照专利文献1等)。
3.在具备通过对置的两个爪部滑动移动来进行接触/分离的类型的抓持部的抓持装置中,为了使爪部进行滑动移动,有时会使用设有螺旋状的槽或曲孔的凸轮。在这样的结构中,通过凸轮的旋转,卡合于凸轮的槽或曲孔的销靠近或远离旋转轴,由此能使爪部进行滑动移动。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2016-144863号公报
技术实现要素:
7.发明所要解决的问题
8.然而,上述的凸轮在应当恰当地进行与爪部相连的销与凸轮的槽的接触时、组装时难以进行准确的定位,若不准确地进行定位,则会有滑动移动的效率降低或者凸轮磨损的问题。
9.本发明鉴于上述内容而完成,其目的在于提供一种能通过准确的定位来恰当地进行凸轮的槽与销的接触从而防止滑动移动的效率降低、凸轮的磨损的抓持装置。
10.用于解决问题的方案
11.为了解决上述的问题并达成目的,本发明的一个方案的抓持装置具备爪保持部、凸轮、电机以及导轨保持部。所述爪保持部以能滑动移动的方式支承于导轨。所述凸轮在其旋转中心的周围设有螺旋状的槽或曲孔,并在所述旋转中心设有孔。所述销的一端卡合于所述爪保持部侧,另一端卡合于所述凸轮的槽或曲孔。所述电机具有固定于所述凸轮的所述孔的轴。所述导轨保持部保持所述导轨并具有孔部,所述孔部能供定位用的夹具卡合于所述轴的与所述凸轮固定的那一侧端部,并能供该夹具的外周面与所述孔部的内周面接触。
12.本发明的一个方案的抓持装置能提供一种能通过准确的定位来恰当地进行凸轮的槽与销的接触从而防止滑动移动的效率降低、凸轮的磨损的抓持装置。
附图说明
13.图1是实施方式的机器人的说明图。
14.图2是表示实施方式的抓持装置的结构的主视图。
15.图3是表示实施方式的抓持装置的结构的侧视图。
16.图4是表示实施方式的固定部的结构的立体图。
17.图5是用于对实施方式的抓持装置的驱动机构进行说明的图之(1)。
18.图6是抓持部的主要部分的分解图。
19.图7是用于对实施方式的抓持装置的驱动机构进行说明的图之(2)。
20.图8是表示实施方式的凸轮的结构的立体图。
21.图9是表示凸轮的制作工序的流程图。
22.图10是表示抓持装置的组装工序的流程图。
23.图11是表示抓持装置的各组装工序中的状态的立体图。
24.图12是对驱动部的电机的轴进行凸轮的固定时的纵剖视图。
25.图13是对驱动部和固定部进行抓持部的固定时的纵剖视图。
26.图14是导轨保持部的立体图之(1)。
27.图15是导轨保持部的立体图之(2)。
具体实施方式
28.以下,参照附图对实施方式的抓持装置进行说明。需要说明的是,本发明不受本实施方式限定。此外,附图中的各元件的尺寸关系、各元件的比例等有时会与实际不同。有时附图彼此之间也会包括彼此的尺寸关系、比例不同的部分。此外,一个实施方式、变形例中所记载的内容原则上也同样适用于其他实施方式、变形例。
29.<机器人的概要>
30.首先,参照图1对实施方式的装配有抓持装置10的机器人1的概要进行说明。图1是实施方式的机器人1的说明图。机器人1是使抓持装置10向期望的位置移动的移动机构的一个例子。需要说明的是,使抓持装置10向期望的位置移动的移动机构不限于机器人,例如也可以是线性致动器等。
31.机器人1是具备多个关节部(也称为机器人模块)3的所谓多关节机器人,例如设置于产品的组装线、制造线。需要说明的是,在图1中,为了方便说明,示出了以铅垂向上为正方向的包含z轴的三维正交坐标系。该正交坐标系有时也会在其他图中示出。
32.机器人1具备基座部2、多个关节部3、多个臂部4以及抓持装置10。需要说明的是,图1中示出了机器人1具备六个关节部3和两个臂部4的例子。
33.六个关节部3按第一关节部3a、第二关节部3b、第三关节部3c、第四关节部3d、第五关节部3e、第六关节部3f的顺序配置于机器人1中的成为动力传递的上游侧的基座部2至成为下游侧的抓持装置10之间。此外,两个臂部4中,在机器人1中的动力传递的上游侧配置有第一臂部4a,在下游侧配置有第二臂部4b。
34.基座部2通过支承第一关节部3a来整体支承机器人1。六个关节部3中的第一关节部3a绕作为虚拟轴的轴ax1这个轴相对于基座部2旋转。第一关节部3a在x-y平面上旋转(也称为回转)。第二关节部3b与第一关节部3a连结,绕轴ax2这个轴相对于第一关节部3a旋转。
35.此外,第二关节部3b与第一臂部4a的一端部连结。第三关节部3c与第一臂部4a的
另一端部连结。第四关节部3d与第三关节部3c连结,绕作为虚拟轴的轴ax3这个轴相对于第三关节部3c旋转。此外,第四关节部3d与第二臂部4b的一端部连结,绕作为虚拟轴的轴ax4这个轴相对于第二臂部4b旋转。
36.第五关节部3e与第二臂部4b的另一端部连结。第六关节部3f与第五关节部3e连结,绕作为虚拟轴的轴ax5这个轴相对于第五关节部3e旋转。在第六关节部3f连结有抓持装置10。抓持装置10绕轴ax6这个轴旋转。
37.抓持装置10装配于位于机器人1的末端部的第六关节部3f,对部件等工件进行抓持。该抓持装置10的结构将在后文中进行阐述。
38.需要说明的是,由六个关节部3构成的机器人1的旋转结构不限于上述内容。例如,机器人1也可以设置为使第二关节部3b与第一臂部4a之间、第四关节部3d与第二臂部4b之间能旋转。
39.此外,六个关节部3分别具备未图示的旋转致动器。机器人1能通过该旋转致动器来进行多轴动作。
40.<抓持装置的结构>
41.接下来,参照图2至图4对实施方式的抓持装置10的结构进行说明。图2是表示实施方式的抓持装置10的结构的主视图,图3是表示实施方式的抓持装置10的结构的侧视图。图4是表示实施方式的固定部40的结构的立体图。
42.如图2和图3所示,抓持装置10具备抓持部20、驱动部30、固定部40以及编码器50。抓持部20对部件等工件进行抓持。抓持部20具有爪部21a、爪部21b、爪保持部22a、爪保持部22b、导轨23a、导轨23b以及导轨保持部24。
43.爪部21a、爪部21b分别设置为能向规定的方向移动,通过夹住工件来抓持该工件。需要说明的是,在图2和图3中,以末端部渐渐变细的形状图示出了爪部21a、爪部21b的形状,但爪部21a、爪部21b的形状不限于该形状,也可以根据被抓持的工件的种类来适当变更。
44.爪保持部22a保持爪部21a,爪保持部22b保持爪部21b。爪保持部22a、爪保持部22b分别被设置为能与爪部21a、爪部21b一起向规定的方向移动。导轨23a、导轨23b分别沿着规定的方向延伸。例如,导轨23a和导轨23b以大致平行的方式排列并延伸。
45.导轨保持部24具有平板状的基部24a和从该基部24a以大致垂直的方式延伸的一对壁部24b。并且,通过该一对壁部24b来分别保持导轨23a、导轨23b。需要说明的是,抓持部20的详细结构将在后文中进行阐述。
46.驱动部30对爪部21a、爪部21b进行驱动。驱动部30具有电机31和轴32(参照图5)。电机31产生对爪部21a、爪部21b进行驱动的驱动力。轴32将由电机31产生的驱动力传递给抓持部20。
47.需要说明的是,在实施方式中,电机31的种类不限,例如可以使用混合式步进电机、dc(直流)电机等。此外,由驱动部30构成的爪部21a、爪部21b的驱动机构的详情将在后文中进行阐述。
48.固定部40将上述的抓持部20和驱动部30固定于机器人1的第六关节部3f。如图4所示,固定部40具有大致
“コ”
字形状,并具有支承部41、连结部42以及梁部43。固定部40例如可以通过钣金的折弯加工、对金属块进行切削来制造。
49.支承部41为大致平板状,在抓持部20与驱动部30之间支承该抓持部20和驱动部30。例如,支承部41在一方的面侧(图2和图3中为z轴负方向侧)支承抓持部20的导轨保持部24,在另一方的面侧(图2和图3中为z轴正方向侧)支承驱动部30。在支承部41设有开口部44,该开口部44供以围绕轴32的方式设于驱动部30的轴向的一方端面的环状突起部38(图5)嵌入。
50.连结部42为大致平板状,与机器人1的第六关节部3f连结。例如,如图4所示,在连结部42中的规定位置形成有螺纹孔42a,通过使用该螺纹孔42a通过螺钉、螺栓等进行螺纹结合,能将连结部42与第六关节部3f连结。连结部42例如设于与支承部41大致平行且相向的位置。
51.需要说明的是,在连结部42的大致中央设有孔42b。该孔42b是在后述的将凸轮27固定(压入)于驱动部30的轴32时供夹具的按压棒92插通的贯通孔。凸轮27用于使爪部21a、爪部21b进行滑动移动。需要说明的是,在固定于连结部42的驱动部30的底部(电机壳体33的底部),在与孔42b对应的位置也同样地设有孔,夹具的轴能从外部穿过固定部40的连结部42并穿过驱动部30的底部(电机壳体33的底部)来按压驱动部30的轴32。
52.梁部43为大致平板状,将支承部41和连结部42相连。梁部43例如与支承部41和连结部42大致垂直。
53.如此,在实施方式的抓持装置10中,抓持部20经由固定部40固定于机器人1。即,在实施方式中,抓持部20不经由驱动部30地固定于机器人1。
54.编码器50检测电机31的旋转位置。编码器50设于比固定部40的支承部41靠电机31侧之处。例如,编码器50相对于电机31设于支承部41的相反侧。需要说明的是,在实施方式中,编码器50的种类不限,例如可以使用光学编码器、磁性编码器等。基于编码器50的信息,能准确地控制爪部21a、爪部21b的距离、速度。需要说明的是,在不需要准确地控制爪部21a、爪部21b的距离、速度的情况下,也可以省略编码器50。
55.<抓持装置的驱动机构>
56.接下来,参照图5至图8对抓持装置10的驱动机构的详情进行说明。图5和图7是用于对实施方式的抓持装置10的驱动机构进行说明的图。图6是抓持部20的主要部分的分解图。图8是表示实施方式的凸轮27的结构的立体图。需要说明的是,在图5和图7中,为了易于理解,省略了爪部21a、爪部21b、导轨保持部24以及固定部40的图示。在图6中,除了爪保持部22a、爪保持部22b、导轨23a、导轨23b、滑动移动部25a、滑动移动部25b、销26a、销26b之外,省略了图示。
57.如图5至图7所示,滑动移动部25a设置为能由导轨23a引导来进行滑动移动,滑动移动部25b设置为能由导轨23b引导来进行滑动移动。即,滑动移动部25a沿着导轨23a的延伸方向滑动移动,滑动移动部25b沿着导轨23b的延伸方向滑动移动。
58.此外,在滑动移动部25a固定有爪保持部22a,在滑动移动部25b固定有爪保持部22b。此外,如图5所示,销26a固定于爪保持部22a,销26b固定于爪保持部22b。需要说明的是,在销26a、销26b的末端设有轴承。因此,爪保持部22a和销26a与滑动移动部25a一体滑动移动,爪保持部22b和销26b与滑动移动部25b一体滑动移动。
59.凸轮27将来自电机31的驱动力传递给销26a、销26b。如图8所示,凸轮27为大致圆板状,并形成有螺旋状的槽27a、槽27b和圆孔27c。槽27a、槽27b形成为随着回转而渐渐远离
(或靠近)凸轮27的中心。圆孔27c形成于凸轮27的旋转中心,是电机31与轴32的嵌合部。需要说明的是,槽27a、槽27b为单面设有螺旋状的凹部且有底的槽,有利于保持凸轮27的强度,但在强度允许的情况下,也可以采用无底而成为贯通孔的曲孔。
60.并且,如图5所示,凸轮27的槽27a中以能滑动的方式插入有销26a,槽27b中以能滑动的方式插入有销26b。此外,圆孔27c中插通有延伸自电机31的轴32,在轴32上固定有凸轮27。
61.该轴32通过由电机31产生的驱动力来旋转。因此,凸轮27经由轴32来通过电机31的驱动力进行旋转。
62.在此,在通过电机31来使凸轮27向规定的旋转方向r1进行了旋转的情况下,会向靠近凸轮27的中心的方向对由螺旋状的槽27a、槽27b进行了引导的销26a、销26b施加力。
63.在此,销26a设置为能与滑动移动部25a一体沿着导轨23a滑动移动。由此,销26a向靠近凸轮27的中心的方向并且向导轨23a的延伸方向即规定的方向d1移动。
64.而且,由于销26a固定于爪保持部22a,因此爪保持部22a和未图示的爪部21a向与上述的方向d1相同的方向即方向d2移动。
65.同样地,销26b设置为能与滑动移动部25b一体沿着导轨23b滑动移动。由此,销26b向靠近凸轮27的中心的方向并且向导轨23b的延伸方向即规定的方向d3移动。
66.而且,由于销26b固定于爪保持部22b,因此爪保持部22b和未图示的爪部21b向与上述的方向d3相同的方向即方向d4移动。
67.并且,由于导轨23a和导轨23b配置为彼此大致平行,因此驱动部30能通过使凸轮27向旋转方向r1旋转来使爪部21a、爪部21b向各自靠近的方向即方向d2、d4移动。此外,相反,驱动部30能通过使凸轮27向与旋转方向r1相反的方向旋转来使爪部21a、爪部21b向各自远离的方向移动。
68.根据至此说明的机构,在实施方式中,使电机31旋转来适当控制爪部21a、爪部21b的距离,由此能利用该爪部21a、爪部21b来抓持工件。
69.此外,在实施方式中,电机31设于支承部41与编码器50之间。由此,当从工件对抓持部20施加了应力时,该应力能经由支承部41被固定部40吸收,因此能抑制编码器50因该应力而振动。其结果为,能提高编码器50的检测精度。
70.<凸轮的制作>
71.图9是表示凸轮27的制作工序的流程图。在图9中,首先利用模具成型用的烧结材料通过模具成型来制作烧结前的凸轮27(步骤s11)。作为模具成型用的烧结材料,例如使用铁系烧结材料。通过采用铁系烧结材料,能得到强度高的凸轮27。由于外形会因下一个工序的烧结而缩小,因此对烧结前的凸轮27进行成型的模具以考虑了缩小量的方式进行设计。
72.接着,对烧结前的凸轮27进行烧结(步骤s12)。通过烧结,凸轮27固化。烧结前的凸轮27通过模具成型而成型为均匀的尺寸,在烧结中也会准确管理缩小量。因此,与通过切削、线切割等机械加工来逐个制作的情况相比,能以低成本进行制作,并且能设为尺寸偏差小的凸轮(确保尺寸精度)。
73.接着,对烧结后的凸轮27进行渗碳淬火(步骤s13)。渗碳淬火为如下方法:在通过气体渗碳等将碳添加至凸轮27的表面之后,通过进行淬火、回火,碳渗透于表面。通过渗碳淬火,能在凸轮27的表面形成渗碳层来提高表面的硬度。即,凸轮27的槽27a、槽27b是供设
于销26a、销26b的轴承滑动的部分,通过设为与轴承同等以上的硬度,能提高耐磨性。
74.接着,对凸轮27进行树脂含浸(步骤s14)。树脂含浸例如为如下方法:浸泡于作为烧结用密封材料的丙烯酸系热固化树脂等的液体中,在树脂渗入之后进行加热等来使其固化。烧结后的凸轮27在表面形成有许多微小的多孔(孔),通过树脂含浸而含有填充于表面的多孔中的树脂材料。凸轮27在嵌入于抓持装置10的状态下会被涂上润滑脂以对销26a、销26b的滑动进行润滑。在不进行树脂含浸的情况下,润滑脂的基础油会因毛细管现象而被摄入凸轮27的多孔中,从而润滑脂会劣化,恐怕会阻碍动作,而通过预先进行树脂含浸,能抑制基础油的摄入,能防止润滑脂的劣化。
75.需要说明的是,关于凸轮27的槽27a、槽27b、圆孔27c,也可以通过研磨等来进行提高平滑度的追加工。
76.<抓持装置10的组装>
77.图10是表示抓持装置10的组装工序的流程图,图11是表示抓持装置10的各组装工序中的状态的立体图。在图10和图11中,首先准备包括电机31的驱动部30(步骤s21)。接着,将驱动部30与固定部40固定(步骤s22)。此时,通过固定部40的开口部44和电机31的环状突起部38,彼此的位置被限定。需要说明的是,关于固定部40的驱动部30与固定部40的固定,例如有通过螺钉来将设于固定部40的贯通孔与设于电机31的电机壳体33的螺纹孔固定的方法等。
78.接着,将凸轮27压入于驱动部30的电机31的轴32(步骤s23)。图12是对驱动部30的电机31的轴32进行凸轮27的固定时的纵剖视图,以驱动部30等相对于图11倒置的状态(凸轮27位于下侧的状态)示出。
79.在图12中,电机31的轴32由轴承34、轴承35支承为能旋转。此外,在轴32上固定有转子36,在轴向上与转子36的外周面对置的电机壳体33侧的位置固定有定子37。
80.另一方面,在压入用夹具的平坦的载置台91设有圆形的凹部91a,在将凸轮27与电机31的轴32固定之前,凸轮27的中心与载置台91的凹部91a对齐,以凸轮27的形成有槽27a、槽27b的面与载置台91相接的状态进行载置。
81.在该状态下,驱动部30和固定部40被移动至凸轮27的上方,电机31的轴32被对齐至凸轮27的圆孔27c的上方。然后,压入用夹具的按压棒92从驱动部30的底部侧(图中的上方)穿过固定部40的孔42b、电机壳体33的孔33a被插入,压入用夹具的按压棒92的端部与轴32中的与和凸轮27固定的那一侧相反的那一侧端部接触,通过从图的上方对按压棒92施加力,轴32压入于凸轮27的圆孔27c。从凸轮27突出的轴32的凸部32a收纳于载置台91的凹部91a。
82.电机31的轴32与凸轮27通过压入而被固定,因此形成由固体与固体接触而实现的紧密固定,几乎不会如由粘接实现的固定那样在施加了较大的负荷的情况下产生粘接强度无法承受而进行空转的不良状况。电机31的轴32与凸轮27被可靠地固定,由此能提高抓持动作时的可靠性。
83.此外,在由粘接实现的固定的情况下,需要进行将从粘接部分溢出的粘接剂拭除的作业,而由压入实现的固定则不需要这样的作业,能谋求作业的简化。而且,在将轴32压入于凸轮27时,从按压棒92对轴32施加的力直接由载置台91承受,因此不会对电机31施加不适当的载荷,电机31也不会受到损伤。
84.回到图10和图11,与驱动部30侧不同,将导轨23a、导轨23b、滑动移动部25a、滑动移动部25b、销26a、销26b(图11中不可视)、爪保持部22a、爪保持部22b安装于导轨保持部24(步骤s24)。
85.接着,从轴32上压入有凸轮27的驱动部30和固定部40(步骤s23)以及安装有导轨23a、导轨23b等的导轨保持部24(步骤s24)起,将固定部40与导轨保持部24固定(步骤s25)。关于固定部40与导轨保持部24的固定,例如有通过螺钉来将设于固定部40的贯通孔与设于导轨保持部24的螺纹孔固定的方法等。
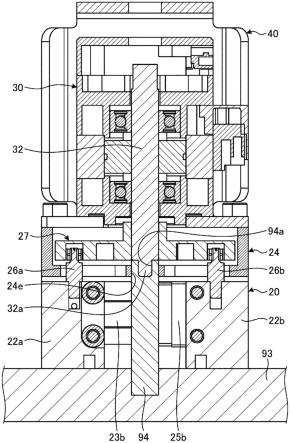
86.图13是对驱动部30和固定部40进行抓持部20的固定时的纵剖视图,以驱动部30等相对于图11倒置的状态(凸轮27位于下侧的状态)示出。在图13中,从组装用夹具的平坦的载置台93直立设置有支承棒94,该支承棒94在末端设有凹部94a。
87.在该状态下,以载置台93上的支承棒94为中心,安装有导轨23a、导轨23b等的导轨保持部24以使爪保持部22a、爪保持部22b位于载置台93侧的方式被载置。此时,支承棒94的末端以其外周面与设于导轨保持部24的圆孔24e的内周面接触的状态被插入。此时,圆孔24e与支承棒94以具有能拆卸的程度的微小间隙(clearance)的方式接触。例如,此时的间隙为10μm。
88.图14和图15是导轨保持部24的立体图,图14是从抓持部20侧观察时的状态(与图5相近的视角),图15是从驱动部30侧观察时的状态,图15中的y-y截面相当于图13的导轨保持部24部分。
89.在图14和图15中,导轨保持部24在平板状的基部24a的一方的面形成有用于固定导轨23a、导轨23b(图5等)的两个壁部24b。在基部24a的背面设有圆形的凹部24c。在基部24a的两个壁部24b之间,在中央设有圆孔24e,隔着圆孔24e设有两个长孔24d。如上所述,圆孔24e中插入有组装用夹具的支承棒94。两个长孔24d提供了两个销26a、26b滑动移动的空间。
90.回到图13,导轨保持部24的圆孔24e插入于组装用夹具的支承棒94,由此,安装有导轨23a、导轨23b等的导轨保持部24的中央在载置台93上被定位。即,爪保持部22a、爪保持部22b的末端(图中为下端)通过与载置台93相接而上下方向被定位,并在载置台93的平面内通过支承棒94的外周面与导轨保持部24的圆孔24e的内周面的接触而被定位。
91.在该状态下,轴32上压入有凸轮27的驱动部30和固定部40以凸轮27侧为支承棒94侧,轴32的末端的凸部32a卡合于支承棒94的末端的凹部94a。与销26a、销26b连结的爪保持部22a、爪保持部22b固定于滑动移动部25a、滑动移动部25b(图5),滑动移动部25a、滑动移动部25b与导轨23a、导轨23b(图5)啮合,导轨23a、导轨23b固定于导轨保持部24。另一方面,由于凸轮27固定于电机31的轴32,因此对于凸轮27与销26a、销26b的位置关系而言,导轨保持部24与轴32的位置关系(同轴度)很重要。因此,在对导轨保持部24侧和驱动部30侧进行组装时,通过以共通的对齐用的组装用夹具(载置台93、支承棒94)为基准对导轨保持部24和轴32进行定位来将导轨保持部24与固定部40固定,能简单而高精度地进行定位。
92.以上,对本发明的实施方式进行了说明,但本发明不限于上述实施方式,只要不脱离其主旨,能进行各种变更。
93.例如,虽然对两个爪部滑动移动的实施方式进行了说明,但也可以是,仅使一方爪部滑动移动,并在该爪部与不滑动移动的爪部之间抓持工件。
94.如上所述,实施方式的抓持装置具备:爪保持部,以能滑动移动的方式支承于导轨;凸轮,在其旋转中心的周围设有螺旋状的槽或曲孔,并在旋转中心设有孔;销,其一端卡合于爪保持部侧,其另一端卡合于凸轮的槽或曲孔;电机,具有固定于凸轮的孔的轴;以及导轨保持部,保持导轨,并具有孔部,该孔部能供定位用的夹具卡合于轴的与凸轮固定的那一侧端部,并能供夹具的外周面与该孔部的内周面接触。由此,能提供一种能通过准确的定位来恰当地进行凸轮的槽与销的接触从而防止滑动移动的效率降低、凸轮的磨损的抓持装置。
95.此外,轴在其从凸轮的孔露出的末端设有能与夹具的凹部卡合的凸部。由此,能可靠地进行轴的定位。
96.此外,对电机进行保持的固定部与导轨保持部固定。由此,电机能以与固定部进行了固定的状态与导轨保持部固定。
97.此外,本发明不受上述实施方式限定。将上述的各组成元件适当组合而构成的抓持装置也包含在本发明内。此外,本领域技术人员能容易地推导出进一步的效果、变形例。因此,本发明的更广泛的方案不限于上述的实施方式,能进行各种变更。
98.附图标记说明
99.10:抓持装置;20:抓持部;22a、22b:爪保持部;23a、23b:导轨;24:导轨保持部;27:凸轮;27a、27b:槽;30:驱动部;31:电机;32:轴;32a:凸部;33:电机壳体;40:固定部;93:载置台;94:支承棒;94a:凹部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
