1.本实用新型属于点胶机技术领域,具体来说,涉及一种点胶机器人的五轴传动机构。
背景技术:
2.点胶机又称涂胶机、滴胶机、打胶机、灌胶机等,专门对流体进行控制。并将流体点滴、涂覆于产品表面或产品内部的自动化机器,可实现三维、四维路径点胶,精确定位,精准控胶,不拉丝,不漏胶,不滴胶。
3.在生产过程中,需要将热熔胶点滴或涂覆在产品上,实现将其它零部件与该产品通过热熔胶牢固的粘贴在一起,目前点胶机器人的五轴传动机构与点胶机器人的下模采用螺栓进行连接固定,当需要对不同规格的产品进行点胶处理时,工作人员需借助辅助工具拧动多个螺栓,整个拆装过程中需反复拧动多个螺栓,操作较为繁琐,耗时耗力。
技术实现要素:
4.针对现有技术存在的点胶机器人的五轴传动机构与点胶机器人的下膜采用螺栓进行连接固定,当需要对不同规格的产品进行点胶处理时,工作人员需借助辅助工具拧动多个螺栓,整个拆装过程中需反复拧动多个螺栓,操作较为繁琐,耗时耗力的问题,本实用新型提供了一种无需使用辅助工具,操作简单便捷的点胶机器人的五轴传动机构。
5.为实现上述技术目的,本实用新型采用的技术方案如下:
6.一种点胶机器人的五轴传动机构,包括:
7.主体机构,所述主体机构上设置有翻转机构,所述翻转机构包括横板,所述横板的顶部固定连接有两个相对称的竖板,其中一个所述竖板的一侧安装有第一电机,另一个所述竖板的一侧通过轴承转动连接有第二电机,所述第一电机的输出端与第二电机固定连接,所述第二电机的输出端固定连接有安装板;
8.支撑机构,所述支撑机构包括设置于安装板顶部的模具,所述模具的两侧均固定连接有连接板,所述连接板底部的两端均固定连接有插杆,所述安装板的四角均开设有供插杆穿过的插孔,所述插杆的表面开设有定位孔;
9.定位组件,所述定位组件包括设置于安装板底部两侧的圆杆,所述圆杆的两端均活动套设有方管,所述安装板底部的另两侧设置有定位杆,所述方管远离圆杆的一端与其相对应的定位杆固定连接,所述定位杆呈凵状结构,且所述定位杆的端部插至定位孔的内腔。
10.采用上述技术方案的一种点胶机器人的五轴传动机构,通过一只手将两个凸块相向捏合,最终使得定位杆的端部从定位孔的内腔脱离,即可对模具解锁,此时另一只手只需将模具向上提取即可完成对模具的拆卸作业,该点胶机器人的五轴传动机构,通过定位组件实现快速拆装的效果,摆脱了传统螺栓的安装方式,整个拆装过程中无需使用辅助工具,操作简单便捷,达到了省时省力的优点。
11.进一步,所述主体机构包括机架,所述机架的工作台上安装有导轨,所述导轨的表面滑动连接有送料板,所述送料板的顶部通过螺栓与横板固定连接。
12.进一步,所述安装板的底部开设有两个相对称的t形槽,所述t形槽的内腔滑动连接有两个相对称的t形块,所述t形块的底部与其相对应的方管固定连接。
13.进一步,所述t形槽与t形块均呈t状结构。
14.进一步,所述圆杆的表面套设有弹簧,所述弹簧的两端分别与其相对应的方管的端部固定连接。
15.进一步,位于前侧另两个方管的表面均固定连接有凸块。
16.本实用新型相比现有技术,具有如下有益效果:
17.本实用新型,提出的点胶机器人的五轴传动机构,通过一只手将两个凸块相向捏合,最终使得定位杆的端部从定位孔的内腔脱离,即可对模具解锁,此时另一只手只需将模具向上提取即可完成对模具的拆卸作业,该点胶机器人的五轴传动机构,通过定位组件实现快速拆装的效果,摆脱了传统螺栓的安装方式,整个拆装过程中无需使用辅助工具,操作简单便捷,达到了省时省力的优点。
附图说明
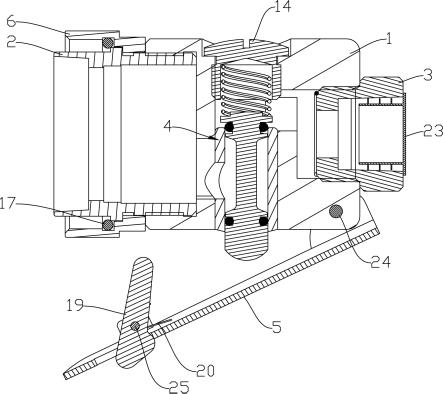
18.图1为本实用新型的一种点胶机器人的五轴传动机构的结构示意图;
19.图2为本实用新型的一种点胶机器人的五轴传动机构的局部连接结构示意图;
20.图3为本实用新型的一种点胶机器人的五轴传动机构的局部连接结构爆炸示意图一;
21.图4为本实用新型的一种点胶机器人的五轴传动机构的局部连接结构爆炸示意图二。
22.图中标记说明:1、主体机构;101、机架;102、导轨;103、送料板;
23.2、翻转机构;201、横板;202、竖板;203、第一电机;204、第二电机;205、安装板;
24.3、支撑机构;301、模具;302、连接板;303、插杆;304、插孔;305、定位孔;
25.4、定位组件;401、圆杆;402、方管;403、定位杆;404、t形槽;405、t形块;406、弹簧;407、凸块。
具体实施方式
26.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
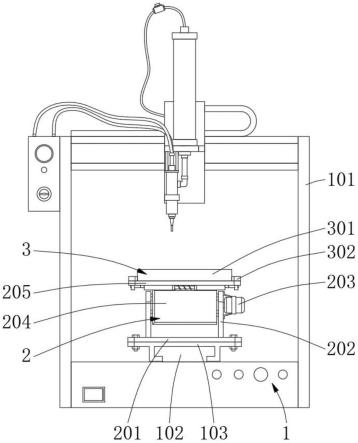
27.如图1-4所示,一种点胶机器人的五轴传动机构,包括:主体机构1、翻转机构2、支撑机构3以及定位组件4。
28.主体机构1上设置有翻转机构2,翻转机构2包括横板201,横板201的顶部固定连接有两个相对称的竖板202,其中一个竖板202的一侧安装有第一电机203,另一个竖板202的一侧通过轴承转动连接有第二电机204,第一电机203的输出端与第二电机204固定连接,第二电机204的输出端固定连接有安装板205。
29.支撑机构3包括设置于安装板205顶部的模具301,模具301的两侧均固定连接有连接板302,连接板302底部的两端均固定连接有插杆303,安装板205的四角均开设有供插杆
303穿过的插孔304,插杆303的表面开设有定位孔305。
30.定位组件4包括设置于安装板205底部两侧的圆杆401,圆杆401的两端均活动套设有方管402,安装板205底部的另两侧设置有定位杆403,方管402远离圆杆401的一端与其相对应的定位杆403固定连接,定位杆403呈凵状结构,且定位杆403的端部插至定位孔305的内腔。
31.具体的,主体机构1包括机架101,机架101的工作台上安装有导轨102,导轨102的表面滑动连接有送料板103,送料板103的顶部通过螺栓与横板201固定连接。通过上述技术方案,利用主体机构1对产品工艺中的胶水、油漆以及其他液体精确点、注、涂、点滴到每个产品精确位置,可以用来实现打点、画线、圆型或弧型。
32.具体的,安装板205的底部开设有两个相对称的t形槽404,t形槽404的内腔滑动连接有两个相对称的t形块405,t形块405的底部与其相对应的方管402固定连接。通过上述技术方案,利用t形槽404和t形块405的配合使用,可对方管402起到限位作用,使得方管402稳定地水平移动。
33.具体的,t形槽404与t形块405均呈t状结构。通过上述技术方案,利用t状结构可有效防止t形块405从t形槽404的内腔滑脱,进而可对方管402起到辅助支撑作用,使得方管402始终置于安装板205的底部。
34.具体的,圆杆401的表面套设有弹簧406,弹簧406的两端分别与其相对应的方管402的端部固定连接。通过上述技术方案,利用弹簧406可对方管402起到自动复位作用,进而达到快速定位的效果。
35.具体的,位于前侧另两个方管402的表面均固定连接有凸块407。通过上述技术方案,利用凸块407可增大工作人员手指与位于前侧两侧方管402的接触面积,以便工作人员操控位于前侧两个方管402。
36.结构原理:使用时,将待加工的产品置于模具301的内腔,启动第一电机203和第二电机204使得模具301内腔的产品可绕x、y轴的转动,实现了该主体机构1的五轴运动,增加了主体机构1的自由度;当对不同规格的产品进行点胶处理时,通过一只手将两个凸块407相向捏合,凸块407带动位于前侧的两个方管402在位于前侧圆杆401的表面滑动,位于前侧两个方管402带动两个定位杆403和位于后侧两个方管402同步相向移动,且方管402带动t形块405在t形槽404的内腔滑动,同时弹簧406受力收缩,直至定位杆403的端部从定位孔305的内腔脱离,即可对模具301解锁,此时另一只手只需将模具301向上提取,模具301带动连接板302和插杆303同步向上移动,即可完成对模具301的拆卸作业。
37.以上对本技术提供的一种点胶机器人的五轴传动机构进行了详细介绍。具体实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。