技术特征:
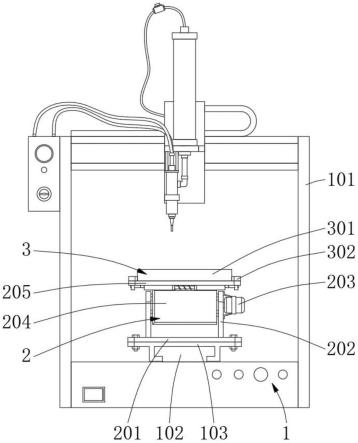
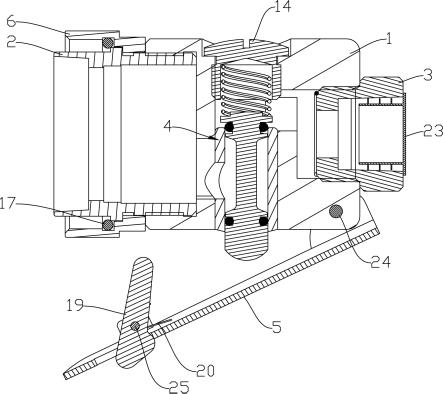
1.一种点胶机器人的五轴传动机构,其特征在于,包括:主体机构(1),所述主体机构(1)上设置有翻转机构(2),所述翻转机构(2)包括横板(201),所述横板(201)的顶部固定连接有两个相对称的竖板(202),其中一个竖板(202)的一侧安装有第一电机(203),另一个竖板(202)的一侧通过轴承转动连接有第二电机(204),所述第一电机(203)的输出端与第二电机(204)固定连接,所述第二电机(204)的输出端固定连接有安装板(205);支撑机构(3),所述支撑机构(3)包括设置于安装板(205)顶部的模具(301),所述模具(301)的两侧均固定连接有连接板(302),所述连接板(302)底部的两端均固定连接有插杆(303),所述安装板(205)的四角均开设有供插杆(303)穿过的插孔(304),所述插杆(303)的表面开设有定位孔(305);定位组件(4),所述定位组件(4)包括设置于安装板(205)底部两侧的圆杆(401),所述圆杆(401)的两端均活动套设有方管(402),所述安装板(205)底部的另两侧设置有定位杆(403),所述方管(402)远离圆杆(401)的一端与其相对应的定位杆(403)固定连接,所述定位杆(403)呈凵状结构,且所述定位杆(403)的端部插至定位孔(305)的内腔。2.根据权利要求1所述的点胶机器人的五轴传动机构,其特征在于:所述主体机构(1)包括机架(101),所述机架(101)的工作台上安装有导轨(102),所述导轨(102)的表面滑动连接有送料板(103),所述送料板(103)的顶部通过螺栓与横板(201)固定连接。3.根据权利要求1所述的点胶机器人的五轴传动机构,其特征在于:所述安装板(205)的底部开设有两个相对称的t形槽(404),所述t形槽(404)的内腔滑动连接有两个相对称的t形块(405),所述t形块(405)的底部与其相对应的方管(402)固定连接。4.根据权利要求3所述的点胶机器人的五轴传动机构,其特征在于:所述t形槽(404)与t形块(405)均呈t状结构。5.根据权利要求1所述的点胶机器人的五轴传动机构,其特征在于:所述圆杆(401)的表面套设有弹簧(406),所述弹簧(406)的两端分别与其相对应的方管(402)的端部固定连接。6.根据权利要求1所述的点胶机器人的五轴传动机构,其特征在于:位于前侧另两个方管(402)的表面均固定连接有凸块(407)。
技术总结
本实用新型公开一种点胶机器人的五轴传动机构,包括设置有翻转机构的主体机构,翻转机构包括横板,横板的顶部固定连接有两个相对称的竖板,其中一个竖板的一侧安装有第一电机,另一个竖板的一侧通过轴承转动连接有第二电机,第一电机的输出端与第二电机固定连接。本实用新型通过一只手将两个凸块相向捏合,最终使得定位杆的端部从定位孔的内腔脱离,即可对模具解锁,此时另一只手只需将模具向上提取即可完成对模具的拆卸作业,该点胶机器人的五轴传动机构,通过定位组件实现快速拆装的效果,摆脱了传统螺栓的安装方式,整个拆装过程中无需使用辅助工具,操作简单便捷,达到了省时省力的优点。时省力的优点。时省力的优点。
技术研发人员:周振鸿
受保护的技术使用者:深圳大轴工业有限公司
技术研发日:2022.04.24
技术公布日:2022/7/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。