1.本发明涉及数字全息图领域。
2.具体地,涉及一种用于对数字全息图进行编码的方法、用于对数字全息图的组进行编码的方法和相关联的编码设备。
背景技术:
3.y.-h.seo、j.-j.choi和d.-w.kim在于2007年2月发表的《信号处理:图像通信》的第22卷的第2期的第144
–
156页的文章“3d scanning-based compression technique for digital hologram video”,描述了一种用于对数字全息图组进行编码的方法,该方法包括以下步骤:将每个全息图分割成段、对每个段应用空间-频率变换、以及扫描不同段以对其进行编码。
4.该方法使得当块的大小与由全息图表示的场景和定义全息图的平面之间的距离相比较小时,能够获得正确的压缩。事实上,只有在这种情况下,变换后的段才会在相邻系数之间具有冗余,从而允许高效的编码。
技术实现要素:
5.在此背景下,本发明提出了一种用于对数字全息图进行编码的方法,该数字全息图由分别与定义数字全息图的平面中的像素相关联的值表示,包括以下步骤:
[0006]-形成分别与由相邻像素组成的区域相关联的矩阵块,每个矩阵块包含根据与所讨论的矩阵块相关联的区域中的像素的值而确定的元素;
[0007]-对每个矩阵块应用空间-频率变换,以便针对每个矩阵块获得系数集合,该系数分别与所讨论的矩阵块内的不同二维空间频率相对应;
[0008]-构造多个二维结构,每个二维结构包括来自多个系数集合的系数,并且与满足依赖于所讨论的二维结构的标准的二维空间频率相关联;
[0009]-对已构造的二维结构进行编码。
[0010]
不同二维结构内系数的重组使得有可能在数字全息图内收集具有可比意义的系数,尽管最初位于不同的系数集合中。因此,编码(应用于这些二维结构)提高了效率。
[0011]
编码方法的其他非限制性和有利的特征,单独地或根据所有技术上可能的组合,如下所示:
[0012]-二维结构通过在每个二维结构中将来自系数集合并且对应于与所讨论的二维结构相关联的二维空间频率的系数分组在一起而构造;
[0013]-二维结构通过在每个二维结构中将来自系数集合并对应于与所讨论的二维结构相关联的二维空间频率的二维范围的系数分组在一起而构造;
[0014]-通过分割所述平面获得区域,该矩阵块的不同元素分别是与这该矩阵块相关联的区域中的像素的值;
[0015]-至少部分通过图像编码算法对已构造的二维结构进行编码;
[0016]-该图像编码算法将特定二维结构或由特定二维结构的系数的幅度或相位(以及对于不同的二维结构依次组成的矩阵)组成的矩阵作为输入图像;
[0017]-全息图的像素的值是实数;
[0018]-全息图的像素的值是复数;
[0019]-二维结构中的系数是复数,对二维结构进行编码的步骤使用通过图像编码算法对所述系数的幅度进行编码的第一处理、以及对所述系数的相位进行编码的第二处理。
[0020]
本发明还提出了一种用于对数字全息图的组进行编码的方法,其中,所述组的每个数字全息图通过如上文提出的编码方法进行编码,并且其中,在不同编码方法期间实施的对二维结构进行编码的不同步骤以预定顺序在所述组中的不同数字全息图内执行。
[0021]
本发明最后提出了一种用于对数字全息图进行编码的设备,该数字全息图由分别与定义数字全息图的平面中的像素相关联的值表示,所述编码设备包括:
[0022]-用于形成分别与由相邻像素组成的区域相关联的矩阵块的模块,使得每个矩阵包含根据与所讨论的矩阵块相关联的区域中的像素的值而确定的元素;
[0023]-用于对每个矩阵块应用空间-频率变换的模块,以便针对每个矩阵块获得系数集合,该系数分别与所讨论的矩阵块内的不同二维空间频率相对应;
[0024]-用于构造多个二维结构的模块,每个结构包括来自多个系数集合并且与满足依赖于所讨论的二维结构的标准的二维空间频率相关联的系数;
[0025]-用于对已构造的二维结构进行编码的模块。
[0026]
当然,本发明的不同特征、替代方案和实施例可以根据各种组合相互关联,只要它们不是相互不相容或互斥的。
附图说明
[0027]
此外,本发明的各种其他特征将从参照示出本发明的非限制性实施例的附图所作的附加描述中变得显而易见,并且其中:
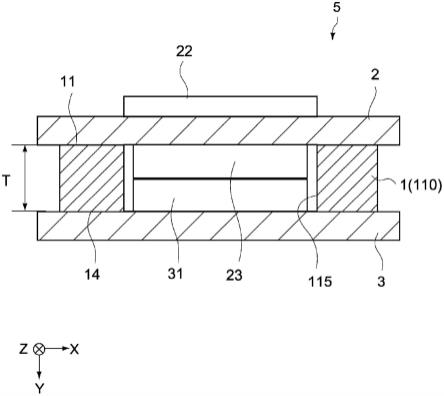
[0028]-图1示意性地示出了根据本发明的编码设备的示例的主要元件;
[0029]-图2示出了在数字全息图内形成矩阵块的可能示例;
[0030]-图3示出了从系数集合构造二维结构;
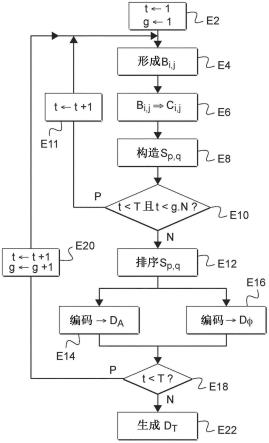
[0031]-图4是根据本发明的示例性编码方法的步骤的流程图;以及
[0032]-图5示出了易于形成根据本发明的编码设备的电子设备的示例的主要元件。
具体实施方式
[0033]
图1示出了根据本发明的编码设备的示例的主要元件。
[0034]
该编码设备包括下文描述的不同模块10、12、14、16、18。例如,通过处理器架构来实施该编码设备,例如,如下文参考图5所描述的。在这样的架构中,不同的模块10、12、14、16、18各自可以通过处理器与例如存储在编码设备的存储器(例如图5所示的电子设备2的存储器6)中的计算机程序指令的合作而制成,并且被设计成在由该处理器执行该模块时实施所讨论的模块的功能。
[0035]
以下,将描述由t个数字全息图序列h
t
(也被称为“全息视频的帧”)组成的全息视
频的编码(通过编码设备)。然而,本发明也适用于单个数字全息图h1的编码(在t=1的情况下)。
[0036]
数字全息图h
t
被定义在一个平面上,每个该数字全息图h
t
通过分别与位置(x,y)的像素相关联的值h
t
(x,y)分布在定义数字全息图h
t
的平面的区域(通常是矩形的)内的二维上。
[0037]
对于给定的数字全息图h
t
,与像素(x,y)相关联的值h
t
(x,y)通常表示在该像素(x,y)处从位于定义数字全息图h
t
的平面的一侧或可能的任一侧上的三维场景接收的光波。
[0038]
在本文描述的示例中,值h
t
(x,y)是复数值,因此由实部和虚部或由幅度(有时被称为范数或模)和相位(等价地)表示。
[0039]
作为替代,值h
t
(x,y)可以是实值。
[0040]
例如,代表序列的数字全息图h
t
的值h
t
(x,y)存储在编码设备的存储器(例如,下文作为示例参考图5给出的电子设备2的存储器6)中。
[0041]
编码设备包括模块10,该模块10用于从表示给定数字全息图h
t
的值h
t
(x,y)形成矩阵块b
i,j
。
[0042]
该模块10被设计为形成分别与由相邻像素组成的区域r
i,j
相关联的矩阵块b
i,j
,使得每个矩阵块b
i,j
包含根据与所讨论的矩阵块b
i,j
相关联的区域r
i,j
的像素(x,y)的值h
t
(x,y)确定的元素b
i,j
(a,b)。
[0043]
在本文描述的示例中,每个矩阵块b
i,j
包括根据像素的值h
t
(x,y)确定的每行mh元素和每列mv元素(矩阵块b
i,j
的行在这里与定义数字全息图h
t
的平面中的像素的x坐标方向相对应,矩阵块b
i,j
的列在这里与这些像素的y坐标方向相对应)。
[0044]
在实践中,数字mh可以在50与500之间(例如,mh等于64或128);同样,数字mv可以在50和500之间(例如,mv等于64或128)。
[0045]
此外,如图2中可见,模块10在这里被设计为形成由每行的kh矩阵块和每列的kv矩阵块(即,由kv行和kh列组成)组成的kh.kv矩阵块的矩阵。(在这个矩阵块的矩阵中,矩阵块b
i,j
位于第j 1行和第i 1列。)
[0046]
本文描述的编码技术对于处理由大量像素(通常高于10,000x10,000)定义的数字全息图特别有趣。在实践中,例如,数字kh(每行的矩阵块b
i,j
的数量)和kv(每列的矩阵块b
i,j
的数量)中的每一个高于500(甚至高于1000)。
[0047]
例如,模块10确定矩阵块b
i,j
的每个元素b
i,j
(a,b),如下所示:
[0048]bi,j
(a,b)=h
t
(a i.dh,b j.dv).w(a,b)
[0049]
其中,dh和dv是两个分别小于或等于mh和mv的严格正整数,并且其中,w是大小为m
h x mv的实数矩阵。
[0050]
在可能的特定情况下,如图2所示,取值dh=mh,dv=mv,并且取矩阵w的所有元素w(a,b)等于1:然后,模块10通过对定义像素的区域进行分割来形成矩阵块b
i,j
,使得矩阵块b
i,j
的不同元素b
i,j
(a,b)分别是与该矩阵块b
i,j
相关联的区域r
i,j
的像素(x,y)的值h
t
(x,y):
[0051]bi,j
(a,b)=h
t
(a i.mh,b j.mv).
[0052]
如图2中通过参考p和p'所示,当某些块元素b
i,j
在定义数字全息图h
t
的像素之间没有对应时,例如因为数字全息图h
t
的尺寸不是mh和mv的倍数(分别),可以用零来完成块bi,j
(通常被称为“填充”的操作)。
[0053]
换句话说,当坐标(a i.mh,b j.mv)不与数字全息图h
t
的像素相对应时,模块10可以设置b
i,j
(a,b)=0。
[0054]
根据可能的实施例,除了基于像素(x,y)的值h
t
(x,y)确定的元素b
i,j
(a,b)之外,模块10可以形成零值的元素b
i,j
(a',b'),以便增加每个矩阵块b
i,j
中的元素的数量,从而增加下文描述的集合c
i,j
中的每个中的系数的数量。根据这个可能的实施例:对于a'从mh 1变化到m'h,对于b'从mv 1变化到m'v,mh《m'h,mv《m'v和b
i,j
(a',b')=0。
[0055]
在模块10的出口处,每个矩阵块b
i,j
包括m'v行和m'h列(例如,m'v在50到1000之间和/或m'h在50到1000之间)。(如果不使用刚才提到的添加零值元素以增加元素数量的可能性,则:
[0056]
mh=m'h和mv=m'v)。
[0057]
编码设备还包括用于应用空间-频率变换的模块12。
[0058]
该模块12被设计成对每个矩阵块b
i,j
应用该空间-频率变换,以便针对每个矩阵块b
i,j
获得分别与所讨论矩阵块b
i,j
内的不同二维空间频率(k,l)相对应的系数c
i,j
(k,l)的集合c
i,j
。
[0059]
通过二维空间频率理解为分别与空间的两个方向(这里,分别沿着定义数字全息图h
t
的平面的x轴和y轴的两个方向)相关联的一对空间频率。
[0060]
例如,所使用的空间-频率变换是二维傅立叶变换。
[0061]
在这种情况下,模块12确定集合c
i,j
的系数c
i,j
(k,l),如下:
[0062][0063]
其中,γ是预定义的常量。
[0064]
使用基于矩阵块b
i,j
的矩阵组织,每个系数的集合c
i,j
包括m'v行和m'h列。
[0065]
编码设备还包括用于构造多个二维结构s
p,q
的模块14。
[0066]
构造模块14被设计成使得构造的每个二维结构s
p,q
包括来自多个系数集合c
i,j
的系数c
i,j
(k,l),并且与满足依赖于所讨论的二维结构s
k,l
的标准的二维空间频率k,l相关联。
[0067]
根据可能的实施例,对于给定的二维结构s
p,q
,构造模块14在该给定的二维结构s
p,q
中将来自所有系数集合c
i,j
并且与值(p,q)的特定的二维空间频率相关联的系数c
i,j
(k,l)分组在一起。
[0068]
如图3示意性所示,通过在该给定二维结构s
p,q
内遵循再现(在上述块矩阵b
i,j
内)块b
i,j
的组织,从中导出系数集合c
i,j
,该给定二维结构s
p,q
的系数s
p,q
(n,m)(位于二维结构s
p,q
中的行n和列m的系数)定义如下:
[0069]sp,q
(n,m)=c
n,m
(p,q)。
[0070]
根据该可能的实施例,构造的二维结构s
p,q
的数量因此等于每组系数c
i,j
的系数c
i,j
(k,l)的数量(每个系数集合c
i,j
的系数c
i,j
(k,l)在这里等于m'v.m'h)。
[0071]
此外,仍然在该可能的实施例的框架内,每个二维结构s
p,q
包括等于块b
i,j
(在上述块矩阵b
i,j
中,并且从图2可以清楚地看出)的数量的系数,即,这里等于kh.kv的数量。准确地
说,每个二维结构s
p,q
包括与块矩阵b
i,j
中的行数(kv)相等的行数和与块矩阵b
i,j
中的列数(kh)相等的列数。
[0072]
可设想其它可能的实施例来构造二维结构s
p,q
,如下文所述。
[0073]
编码设备还包括用于对二维结构s
p,q
进行编码的模块16。
[0074]
该编码模块16被设计成以预定义的顺序对二维结构s
p,q
进行排序,并对排序的二维结构的系数s
p,q
(n,m)进行编码,以获得至少一个数据序列da、d
φ
。
[0075]
例如,编码模块16根据已经提到的文章“3d scanning-based compression technique for digital hologram video”中设想的方法中的一个,对二维结构s
p,q
进行排序,以对通过离散余弦变换获得的段进行排序。
[0076]
在本文描述的包含在二维结构s
p,q
中的系数s
p,q
(n,m)是复数的示例中,编码模块16分别对系数s
p,q
(n,m)的幅度和系数s
p,q
(n,m)的相位进行编码。
[0077]
编码模块16通过诸如mpeg-4avc标准或mpeg-4hevc或mv-hevc标准中描述的图像编码处理,例如将系数s
p,q
(n,m)的幅度编码为数据序列da。
[0078]
编码模块16可以通过另一种编码处理,将系数s
p,q
(n,m)的相位编码为数据序列d
φ
,例如h.gu et g.jin于2018年12月在opt.express的第26卷的第26号的第33592-33603页的“phase-difference-based compression of phase-only holograms for holographic three-dimensional display”中所描述的。
[0079]
在包含在二维结构s
p,q
中的系数s
p,q
(n,m)是实数的实施例中,可以通过图像编码处理(例如上文提到的那些)对这些系数进行直接编码。
[0080]
编码设备最后包括模块18,用于基于由编码模块16产生的编码数据生成要传输的数据流(或二进制流)d
t
。在一个实施例中,通过数据序列da和数据序列d
φ
的顺序组合来生成要传输的数据流d
t
(这里针对每组数字全息图,如上文所解释的)。换句话说,相继发送数据序列da和d
φ
以形成流d
t
,并且对于每组n个数字全息图h
t
依次发送。
[0081]
现在将参考图4描述可由图1的编码设备实施的编码方法的示例。
[0082]
将这种编码方法应用于将t个数字全息图序列组织成n个数字全息图组。因此,每组数字全息图包括n个数字全息图h
t
,这些数字全息图按照t个数字全息图的顺序依次排列。
[0083]
如已经指出的,例如,数字全息图h
t
存储在图1的编码设备的存储器中。以下描述的处理步骤也可以使用该存储器来存储在每个处理步骤之后获得的数据(以及中间结果)。
[0084]
t个数字全息图h
t
(或帧)的序列形成全息视频。
[0085]
图4的方法从步骤e2开始,在该步骤e2中变量t和变量g被初始化为值1。从以下解释中可以明显看出,变量t表示当前数字全息图h
t
(即,应用了在所述步骤期间执行的处理操作的数字全息图),变量g表示当前全息图组。
[0086]
图4的方法继续于步骤e4,在此期间,编码设备(具体地,这里为模块10)形成分别与由当前全息图h
t
的相邻像素形成的区域r
i,j
相关联的矩阵块b
i,j
,以这种方式形成的每个矩阵块b
i,j
包含根据与所讨论的块b
i,j
相关联的区域r
i,j
的中像素的值而确定的元素b
i,j
(a,b)。
[0087]
如图2中所示,这里的每个区域r
i,j
包括水平方向(像素的x坐标方向)上的mh像素和垂直方向(像素的y坐标方向)上的mv像素。
[0088]
如上文所述,例如(这里由模块10)获得根据像素的值确定的这些元素b
i,j
(a,b),如下所示:
[0089]bi,j
(a,b)=h
t
(a i.dh,b j.dv).w(a,b)。
[0090]
根据可能的实施例,如已经提出的,通过对当前全息图h
t
的分割来获得矩阵块b
i,j
:
[0091]bi,j
(a,b)=h
t
(a i.dh,b j.dv),其中dh=mh,dv=mv.
[0092]
如上文所述,模块10可以潜在地在矩阵块b
i,j
内添加零值的元素b
i,j
(a',b'),以便特别地增加每个集合c
i,j
中的系数c
i,j
(k,l)的数量。
[0093]
在本文描述的示例中,如图2所示,步骤e4因此使得可能形成kh.kv矩阵块b
i,j
的组织作为矩阵块b
i,j
的kv行和矩阵块b
i,j
的kh列的矩阵,每个矩阵块b
i,j
本身包括m'v行和m'h列。如上文所述,例如,在实践中使用以下值:kh高于500(甚至高于1000)和/或kv高于500(甚至高于1000)和/或m'v介于50与1000之间,和/或m'h介于50与1000之间。
[0094]
然后,图4的方法包括步骤e6,对每个矩阵块b
i,j
(分别取)应用空间-频率变换,以便针对每个矩阵块b
i,j
获得系数c
i,j
(k,l)的集合c
i,j
,每个系数分别与所讨论的矩阵块b
i,j
内的不同二维空间频率(k,l)相对应。这里由上述模块12实施这一步骤。
[0095]
如上所述,对于每个矩阵块b
i,j
,这里的步骤e6包括将该空间-频率变换(例如二维傅立叶变换)应用于所讨论的矩阵块b
i,j
的元素集合。
[0096]
因此,这里的步骤e6使得可以产生kh.kv集合c
i,j
,每组包括分别对应于m'v.m'h二维空间频率(通过扫描m'h水平频率k和m'v垂直频率l而获得)的m'v.m'h系数c
i,j
(k,l)。
[0097]
然后,图4的方法包括步骤e8,其构造多个二维结构s
p,q
,每个二维结构s
p,q
包括来自多个系数集合c
i,j
并且与满足依赖于所讨论的二维结构s
p,q
的标准的二维空间频率(k,l)相关联的系数c
i,j
(k,l)。这里由构造模块14实施这一步骤e8。
[0098]
根据第一可能的实施例,在步骤e8中,二维结构s
p,q
是通过在每个二维结构s
p,q
中将来自系数集合c
i,j
的系数c
i,j
(k,l)分组在一起并对应于与所讨论的二维结构s
p,q
相关联的特定二维空间频率(k,l)来构造的。
[0099]
因此,在这种情况下,给定的二维结构s
p,q
将表示相同的二维空间频率(k,l)的系数c
i,j
(k,l)分组在一起。
[0100]
因此,在上述情况下,步骤e8使得可以构造m'h.m'v二维结构s
p,q
,每个结构包括kh.kv系数。
[0101]
如图3中所示,本文进一步建议在每个二维结构s
p,q
内使用块b
i,j
的矩阵结构,从中导出提供所讨论的二维结构s
p,q
的系数c
i,j
(k,l)的集合c
i,j
,即通过以下方式定义每个块s
p,q
的系数s
p,q
(n,m):
[0102]sp,q
(n,m)=c
n,m
(p,q)。
[0103]
以这种方式形成的每个二维结构s
p,q
具有(关于系数的幅度)接近于将通过三维场景的平行投影获得的二维图像的特征。因此,二维结构s
p,q
具有浅景深yu二维结构内相邻系数之间的强空间冗余,这允许在下文描述的步骤e14对其进行有效编码。
[0104]
根据第二可能的实施例,在步骤e8中,二维结构s
p,q
是通过在每个二维结构s
p,q
中将来自不同系数c
i,j
(k,l)的集合c
i,j
的系数c
i,j
(k,l)分组在一起并对应于与所讨论的二维结构s
p,q
相关联的二维空间频率(k,l)的二维范围来构造的。
[0105]
因此,在这种情况下,定义了二维空间频率的不同二维范围(每个二维范围例如覆盖在系数的每个集合c
i,j
中表示的二维空间频率的不同值的特定数字,下文中表示为α.β,其中α和β是两个整数,例如α除m'h和β除m'v)。然后,给定的二维结构s
p,q
将来自所有集合c
i,j
的c
i,j
(k,l)分组在一起,并表示包括在这些二维范围中的特定二维范围中的二维空间频率(k,l)。在这种情况下,例如,二维结构s
p,q
的系数s
p,q
(n,m)可以通过以下方式给出:
[0106]sp,q
(n,m)=c
e(n/α),e(m/β)
(p.α n[α],q.β m[β]),其中,e(z)表示z的整数部分,n[α]是n除以α的欧几里得除法的余数,m[β]是m除以β的欧几里得除法的余数。
[0107]
因此,在上述情况下,步骤e8使得可以构造m'h.m'v/(α.β)二维结构s
p,q
,每个结构包括α.β.kh.kv系数。该实施例的优点在于,它允许产生不太重要数量的二维结构s
p,q
,其系数的幅度总是具有接近于通过三维场景的平行投影而获得的那些特征。通过增加α和β的值,可以进一步减少二维结构s
p,q
的数量,而代价是减少相同二维结构内相邻系数之间的空间冗余。
[0108]
图4的方法在步骤e10继续,在此期间,编码设备(这里是其处理器)确定是否t《t和t《g.n。
[0109]
只要数字全息图序列的最后一个数字全息图ht没有经过处理,不等式t《t就成立。
[0110]
只要所处理的最后一个数字全息图h
t
不是当前数字全息图组的最后一个数字全息图(如上文所述,当前组的索引g),不等式t《g.n就成立。
[0111]
在步骤e10处确定为是的情况下(即,所处理的后一数字全息图h
t
既不是序列中的最后一个也不是组中的最后一个),该方法通过增加表示当前数字全息图h
t
的变量t在步骤e11继续,然后继续上文描述的步骤e4处理新的当前数字全息图h
t
。
[0112]
在步骤e10处确定为否的情况下(即,当所处理的后一数字全息图h
t
是序列中的最后一个或组中的最后一个时),编码设备(这里特别是编码模块16)以预定义的顺序(或预定义的序列)对当前组的不同数字全息图(步骤e12)获得的不同二维结构s
p,q
进行排序(在步骤e8中的连续过程期间)。
[0113]
如已经指出的,所选择的预定义的顺序例如是已经提到的文章“基于三维扫描的数字全息图视频压缩技术”中提出的顺序,以对通过离散余弦变换获得的段进行排序。
[0114]
在实施步骤e12之后,获得二维结构s
p,q
的有序序列(该有序序列的二维结构s
p,q
来自对当前组的不同数字全息图h
t
的处理;因此,二维结构s
p,q
的有序序列至少包括通过处理该组的第一数字全息图获得的第一二维结构和通过处理该组的第二数字全息图获得的第二二维结构)。
[0115]
然后,图4的方法继续对如此排序的二维结构s
p,q
进行编码,这里一方面通过对存在于二维结构s
p,q
中的系数的幅度进行编码(步骤e14),另一方面通过对这些系数的相位进行编码(步骤e16)。
[0116]
每个二维结构s
p,q
具有与图像相同的矩阵形状,并且因此可以通过将所讨论的二维结构作为该算法的输入图像的图像处理算法(在幅度和/或相位上)对每个二维结构s
p,q
进行编码。
[0117]
因此,该图像处理算法可以通过依次将特定的二维结构(或在实践中,由该二维结构的系数的各个幅度形成的矩阵和/或由该二维结构的系数的各个相位形成的矩阵)作为该算法的输入图像,连续地应用于不同有序的二维结构(在步骤e12获得)。
[0118]
因此,在步骤e14,编码模块16将图像编码算法依次应用于各由特定二维结构s
p,q
的系数s
p,q
(n,m)的不同幅度值形成的不同矩阵(在步骤e12,这些矩阵按照给于二维结构s
p,q
的顺序获取)。例如,图像编码算法是诸如mpeg-4avc标准或mpeg-4hevc或mv-hevc标准中描述的图像编码处理。
[0119]
因此,步骤e14使得能够获得参与当前全息图组的编码的数据序列da。
[0120]
类似地,在步骤e16,编码模块16将编码算法依次应用于各由特定二维结构s
p,q
的系数s
p,q
(n,m)的相位值形成的不同矩阵(在步骤e12,这些矩阵按照给于二维结构s
p,q
的顺序获取)。所使用的编码算法例如是于2018年12月的h.gu et g.jin的opt.express的第26卷的第26号的第33592-33603页的“phase-difference-based compression of phase-only holograms for holographic three-dimensional display”中所描述的编码算法;因此,这里所使用的编码算法不同于在步骤e14中使用的图像编码算法。
[0121]
因此,步骤e16使得能够获得参与当前全息图组的编码的数据序列d
φ
。
[0122]
图4的方法在步骤e18继续,其中编码设备(实际上是其处理器)确定t《t(也就是说,检查在步骤e4到e8中的最后一段处理的数字全息图h
t
不是序列的最后一个数字全息图h
t
)。
[0123]
在肯定的情况下(即,如果确定处理的最后一个数字全息图h
t
不是该序列的最后一个数字全息图h
t
),则该方法在步骤e20继续进行,以递增表示当前数字全息图h
t
的变量t和表示当前数字全息图组的变量g(根据步骤e10中的前一段的结果已经处理的组的最后一个数字全息图)。
[0124]
然后,该方法循环到步骤e4,以再次处理新的数字全息图组。
[0125]
在步骤e18为否的情况下(即,当序列的最后一个数字全息图ht已经被处理时),该方法在步骤e22继续,其中模块18根据在前面段落中针对处理的不同数字全息图组分别产生的数据da、d
φ
序列来输出数据流d
t
。
[0126]
例如,数据流d
t
包括连续的多个数据流dgoh,每个数据流都与数字全息图组有关,每个数据流dgoh依次包括如上文为该组数字全息图所解释确定的数据序列da和数据序列d
φ
。
[0127]
图5描述了易于形成根据本发明的编码设备的电子设备2的示例。
[0128]
该电子设备2包括处理器4(例如,微处理器)、至少一个存储器6和电信电路8。
[0129]
存储器6可以存储计算机程序指令,当由处理器4执行这些指令时,这些指令被设计成实施图4的方法中的至少某些步骤。
[0130]
如已经指示的,存储器6(或潜在的另一存储器)可以进一步存储分别与像素(x,y)相关联的值h
t
(x,y),以各自定义如上文所解释处理的数字全息图h
t
。然后,存储器6(或潜在的另一存储器)可以存储在下文描述的处理操作期间处理的不同值,特别是矩阵块b
i,j
的元素b
i,j
(a,b)、系数集合c
i,j
的系数c
i,j
(k,l)、二维结构s
p,q
的系数s
p,q
(n,m)和数据da、d
φ
、d
t
。
[0131]
最后,电信电路8被设计成(例如,根据来自处理器4的命令)通常向另一电子设备(未示出)传输在步骤e22获得的数据流d
t
。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。