1.本技术涉及起重机领域,尤其涉及一种用于五节臂的油缸系统。
背景技术:
2.相关技术中,五节臂的伸缩限制了优先级,即在出臂时,二节臂优先发生动作后,其余节臂才能随后发生动作,在回臂时,其余节臂优先发生动作,二节臂才能随后发生动作,导致了五节臂不能随场地情况进行顺序自由的伸缩。
技术实现要素:
3.本技术旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本技术的目的在于提出一种用于五节臂的油缸系统,能够使五节臂进行顺序自由的伸缩。
5.为实现上述目的,本技术实施例提出了一种用于五节臂的油缸系统,所述油缸系统包括一级油缸和二级油缸,所述一级油缸的活塞杆连接在一节臂的内壁,所述一级油缸的缸筒连接在二节臂的内壁,所述二级油缸的活塞杆连接在所述二节臂的内壁,所述二级油缸的缸筒连接在三节臂的内壁,所述二级油缸的进油路配置有压差顺序阀,所述一级油缸和所述二级油缸的出油路间配置有电子切换阀。
6.根据本技术实施例提出的油缸系统,通过在一级油缸和二级油缸的出油路间配置电子切换阀,出臂时打开电气切换阀,可使二级油缸优先于一级油缸伸出,同时,回臂时打开电气切换阀,可使一级油缸优先于二级油缸收缩,可以使五节臂能够进行顺序自由的伸缩。
7.另外,根据本技术提出的油缸系统还可以具有如下附加技术特征:
8.进一步地,所述一级油缸的活塞杆通过第一枢轴铰接在所述一节臂的内壁。
9.进一步地,所述一级油缸的缸筒通过第二枢轴铰接在所述二节臂的内壁。
10.进一步地,所述二级油缸的活塞杆铰接在所述第二枢轴。
11.进一步地,所述二级油缸的缸筒通过第三枢轴铰接在所述三节臂的内壁。
12.进一步地,所述一级油缸和所述二级油缸平行地布置。
13.进一步地,所述一级油缸和所述二级油缸的进油路并联在主进油管。
14.进一步地,所述一级油缸和所述二级油缸的出油路并联在主出油管。
15.进一步地,所述三节臂通过钢丝绳带动四节臂和五节臂同步地伸缩。
16.进一步地,所述电子切换阀配置在所述三节臂的内部。
附图说明
17.下面将参照附图对本技术的示例性实施例进行详细描述,应当理解,下面描述的实施例仅用于解释本技术,而不是对本技术范围的限制,在附图中:
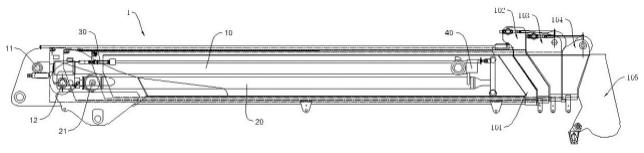
18.图1是根据本技术实施例的油缸系统的示意图;
19.附图标记:
20.1、油缸系统;
21.10、一级油缸;
22.20、二级油缸;
23.30、压差顺序阀;
24.40、电子切换阀;
25.11、第一枢轴;
26.12、第二枢轴;
27.13、第三枢轴;
28.101、一节臂;
29.102、二节臂;
30.103、三节臂;
31.104、四节臂;
32.105、五节臂。
具体实施方式
33.下面结合示例详细描述本技术的优选实施例。但是,本领域技术人员应当理解,这些示例性实施例并不意味着对本技术形成任何限制。此外,在不冲突的情况下,本技术的实施例中的特征可以相互组合。在不同的附图中,相同的部件用相同的附图标记表示,且为简要起见,省略了其他的部件,但这并不表明不可以包括其他部件。应当理解,附图中各部件的尺寸、比例关系以及部件的数目均不作为对本技术的限制。
34.如图1所示,根据本技术实施例的油缸系统1包括一级油缸10、二级油缸20、压差顺序阀30以及电子切换阀40,其中,一级油缸10的活塞杆连接在一节臂101的内壁,一级油缸10的缸筒连接在二节臂102的内壁,二级油缸20的活塞缸连接在二节臂102的内壁,二级油缸20的缸筒连接在三节臂103的内壁,且压差顺序阀30配置在二级油缸20的进油路,电子切换阀40配置在一级油缸10和二级油缸20的出油路之间。
35.相关技术中,五节臂的伸缩限制了优先级,即在出臂时,二节臂优先发生动作后,其余节臂才能随后发生动作,在回臂时,其余节臂优先发生动作,二节臂才能随后发生动作,导致了五节臂不能随场地情况进行顺序自由的伸缩。
36.为此,本技术的用于五节臂的油缸系统,通过压差顺序阀30和电子切换阀40的配合,压差顺序阀30配置在二级油缸20的进油路,电子切换阀40配置在一级油缸10和二级油缸20的出油路间,出臂时如果关闭电子切换阀40,在压差顺序阀30的限制作用下,一级油缸10优先伸出,带动二节臂102出臂,在一级油缸10完全伸出后,二级油缸20开始伸出,带动三节臂103出臂,而三节臂103的伸出会同步地带动四节臂104和五节臂105出臂,在二级油缸20完全伸出后,所有节臂均处于完全伸出状态。
37.出臂时如果打开电子切换阀40,二级油缸20会优先供油伸出,带动三节臂103出臂,而三节臂103的伸出会同步地带动四节臂104和五节臂105出臂,在二级油缸20完全伸出后,一级油缸10开设供油出臂,带动二节臂102出臂,在一级油缸10完全伸出后,所有节臂均处于完全伸出状态。
38.回臂时如果关闭电子切换阀40,二级油缸20会优先收缩,带动三节臂103回臂,而三节臂103的回臂会同步地带动四节臂104和五节臂105回臂,在二级油缸20完全收缩后,一级油缸10开始收缩,带动二节臂102回臂,在一级油缸10完全收缩后,所有节臂均处于完全收回状态。
39.回臂时如果打开电子切换阀40,一级油缸10会优先收缩,带动二节臂103回臂,在一级油缸10完全收缩后,二级油缸20开始收缩,带动三节臂103回臂,而三节臂103的回臂会同步地带动四节臂104和五节臂105回臂,在二级油缸20完全收缩后,所有节臂均处于完全收回状态。
40.因此,本技术的用于五节臂的油缸系统1能够使五节臂进行顺序自由的伸缩,即可以根据不同场地情况进行伸缩顺序的切换。
41.根据本技术的一个实施例,一级油缸10的活塞杆通过第一枢轴11铰接在一节臂101的内壁,一级油缸10的缸筒通过第二枢轴12铰接在二节臂102的内壁,而二级油缸20的活塞杆铰接在第二枢轴12,二级油缸20的缸筒通过第三枢轴21铰接在三节臂103的内壁。
42.可选地,一级油缸10和二级油缸20平行地布置在五节臂的内部。
43.根据本技术的一个实施例,一级油缸10和二级油缸20的进油路并联在主进油管,一级油缸10和二级油缸20的出油路并联在主出油管,电子切换阀40配置在三节臂103的内部,三节臂103通过钢丝绳同步地带动四节臂104和五节臂105的伸缩。
44.需要说明的是,由于压差顺序阀30和电子切换阀40均为现有技术,在此不再对其内部结构及工作机理做赘述,另外,通过钢丝绳带动四节臂104以及五节臂105随三节臂103同步地伸缩也是现有技术,在此不再对钢丝绳的具体连接形式做赘述。
45.根据本技术实施例提出的油缸系统,通过在一级油缸和二级油缸的出油路间配置电子切换阀,出臂时打开电气切换阀,可使二级油缸优先于一级油缸伸出,同时,回臂时打开电气切换阀,可使一级油缸优先于二级油缸收缩,可以使五节臂能够进行顺序自由的伸缩。
46.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替代和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。