1.本发明涉及电极头修复设备技术领域,具体的说是一种机器人电极帽自动整形装置。
背景技术:
2.点焊机器人由机器人本体、计算机控制系统和点焊焊接系统几部分组成,由焊枪部分的上下两个电极帽夹持工件,再在两个电极帽之间通过电流,使工件处于两个电极帽之间的部分融化焊接在一起;点焊机器人的发展,对节拍和精度的要求越来越高;
3.电极帽部分会因在焊接时经过电流而产生氧化,甚至产生火花飞溅,造成工件和电极帽表面形成毛刺;因此点焊机器人的焊枪部分在使用一定次数后,会电极帽进行更换或修磨来改善焊接品质;一些企业直接更换电极帽或使用机器人电极帽自动整形装置修磨电极帽,以此达到电极帽最佳的焊接状态,这样降低生产效率,增加了生产成本;
4.现市场上的电极帽修磨装置都只能对顶端形状为球形的常规型号的电极帽进行修磨,无法对特殊形状的电极帽无法进行修磨,例如偏心电极帽和前端形状为四棱台形状的电极帽;进而造成该技术方案的局限性。
5.鉴于此,为了克服上述技术问题,本发明提出了一种机器人电极帽自动整形装置,解决了上述技术问题。
技术实现要素:
6.为了弥补现有技术的不足,本发明提出的一种机器人电极帽自动整形装置,通过在焊接机器人更换不同规格的电极帽的同时,更换相对应的研磨刀具;在对常规的电极帽进行切削研磨时,驱动电机带动一号刀具转动,在对偏心电极帽进行切削研磨时,1号偏向电动推杆、2号偏向电动推杆、3号偏向电动推杆和4号偏向电动推杆推动驱动电机,使得驱动电机带着二号刀具围绕偏心电极帽转动,对偏心电极帽进行切削研磨;在对四棱台形电极帽进行切削研磨时,四个偏向电动推杆再次推动驱动电机,使得三号刀具沿着四棱台形电极帽的四个斜面移动,再对四棱台形电极帽的顶端面进行切削研磨,从而使得本装置能够对常规电极帽、偏心电极帽和四棱台形电极帽进行切削研磨,扩大了原本机器人电极帽自动整形装置的适用范围。
7.本发明解决其技术问题所采用的技术方案是:本发明所述的一种机器人电极帽自动整形装置,包括:
8.机架;
9.驱动电机;驱动电机的输出轴固连有一号齿轮;
10.安装架;安装架与驱动电机固连,安装架内通过环形块转动连接有二号齿轮;环形块的两端分别与二号齿轮固连和安装架转动连接;
11.研磨刀具;研磨刀具安装在二号齿轮上,用于对电极帽进行切削研磨;
12.控制器;用于控制本发明中电器元件的运行;
13.驱动电机通过调整装置安装在机架上,使得驱动电机本体能够360
°
方向转动。
14.优选的,调整装置包括转向球、偏向电动推杆和固定圈;转向球与驱动电机的底部固连且与机架之间球铰接;固定圈套在驱动电机的外侧且与驱动电机固连;固定圈的外侧均匀地铰接偏向电动推杆;偏向电动推杆的另一端均与机架相铰接。
15.优选的,研磨刀具为一套刀具,包括一号刀具、二号刀具和三号刀具;一号刀具、二号刀具和三号刀具均能够与二号齿轮卡合。
16.优选的,二号刀具由一号块和二号块组成;一号块的底端对称开设有弹簧槽;弹簧槽内固连有一号弹簧;一号弹簧的另一端与二号块固连。
17.优选的,转向球的底端开设有贯穿槽;机架内固连有能够插入贯穿槽内的固定电动推杆。
18.优选的,二号齿轮上开设有圆柱形的通槽;通槽贯穿二号齿轮,通槽的槽壁上开设有卡合槽;一号刀具、二号刀具和三号刀具均能够与卡合槽相卡合;一号刀具、二号刀具和三号刀具与通槽之间有缝隙。
19.优选的,驱动电机的底端外侧固连有喇叭形状的波纹块;波纹块的另一端与机架固连;安装架上固连有毛刷;毛刷均匀地固连在安装架的上端面并且环绕安装架上的开孔。
20.优选的,三号刀具由三号块和四号块组成;三号块与卡合槽相卡合;四号块与三号块之间滑动连接;四号块与三号块之间设置压缩弹簧且压缩弹簧的两端分别与三号块和四号块固连;四号块的形状为固连有铣刀的横板。
21.优选的,研磨刀具为一套刀具,包括第一刀具、第二刀具和第三刀具;第一刀具上下两端向内凹陷,凹陷的底部为圆弧状;第二刀具上端向下凹陷的形状与第一刀具相同,第二刀具下端向内凹陷,凹陷的截面形状为等腰梯形,第二刀具下端能够对顶端形状为圆台形的电极帽进行研磨;第三刀具上端向内凹陷的形状与第一刀具相同,第三刀具下端同样向内凹陷,凹陷的形状为等腰梯形,第三刀具的下端能够对顶端形状为圆柱形的电极帽进行研磨。
22.本发明的有益效果如下:
23.本发明通过在焊接机器人更换不同规格的电极帽的同时,更换相对应的研磨刀具;在对常规的电极帽进行切削研磨时,驱动电机带动一号刀具转动,在对偏心电极帽进行切削研磨时,1号偏向电动推杆、2号偏向电动推杆、3号偏向电动推杆和4号偏向电动推杆推动驱动电机,使得驱动电机带着二号刀具围绕偏心电极帽转动,对偏心电极帽进行切削研磨;在对四棱台形电极帽进行切削研磨时,四个偏向电动推杆再次推动驱动电机,使得三号刀具沿着四棱台形电极帽的四个斜面移动,再对四棱台形电极帽的顶端面进行切削研磨,从而使得本装置能够对常规电极帽、偏心电极帽和四棱台形电极帽进行切削研磨,扩大了原本机器人电极帽自动整形装置的适用范围。
附图说明
24.下面结合附图对本发明作进一步说明。
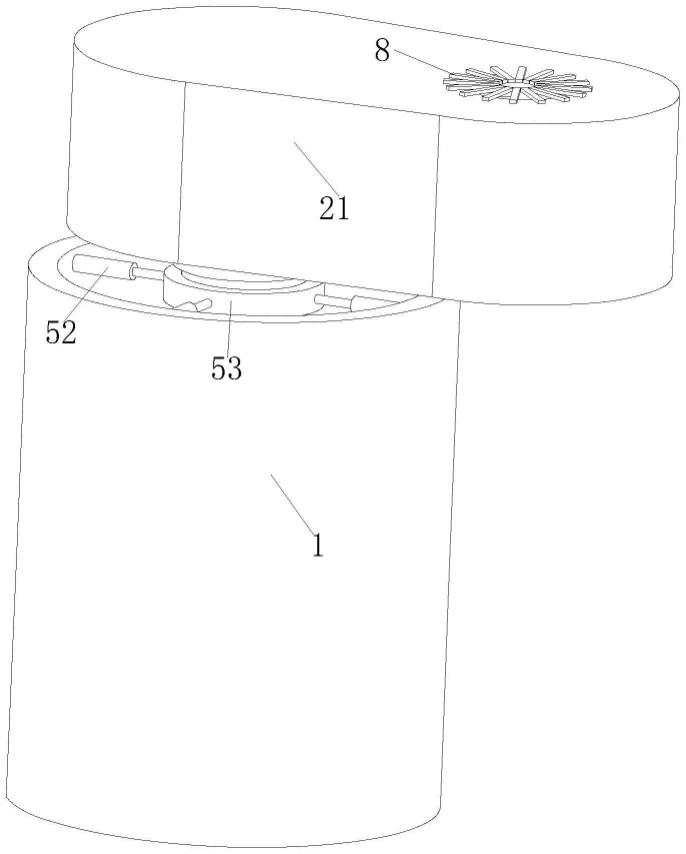
25.图1是本发明第一种实施例的立体图;
26.图2是本发明的第一种实施例的局部剖视图;
27.图3是图2中a-a处的剖视图;
28.图4是本发明中二号齿轮以及一号刀具的立体图;
29.图5是本发明中二号齿轮以及三号刀具的立体图;
30.图6是本发明中二号刀具与偏心电极帽之间的位置示意图;
31.图7是本发明中三号刀具与四棱台形电极帽之间的位置示意图;
32.图8是本发明第二种实施例二号齿轮和第一刀具之间的位置关系图;
33.图9是本发明第二种实施例二号齿轮和第二刀具之间的位置关系图;
34.图10是本发明第二种实施例二号齿轮和第三刀具之间的位置关系图;
35.图中:1、机架;2、驱动电机;21、安装架;22、环形块;3、一号齿轮;31、二号齿轮;4、研磨刀具;41、一号刀具;42、二号刀具;43、三号刀具;44、一号块;45、二号块;46、弹簧槽;47、一号弹簧;48、三号块;49、四号块;5、调整装置;51、转向球;52、偏向电动推杆;53、固定圈;54、贯穿槽;55、固定电动推杆;6、通槽;61、卡合槽;7、波纹块;8、毛刷;81、压缩弹簧;9、第一刀具;91、第二刀具;92、第三刀具。
具体实施方式
36.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
37.实施例1:
38.一种机器人电极帽自动整形装置,包括:
39.机架1;
40.驱动电机2;驱动电机2的输出轴固连有一号齿轮3;
41.安装架21;安装架21与驱动电机2固连,安装架21内通过环形块22转动连接有二号齿轮31;环形块22的两端分别与二号齿轮31固连和安装架21转动连接;
42.研磨刀具4;研磨刀具4对称地安装在二号齿轮31的两侧,用于对电极帽进行切削研磨;
43.控制器;用于控制本发明中电器元件的运行;
44.驱动电机2通过调整装置5安装在机架1上,使得驱动电机2本体能够360
°
方向转动;
45.调整装置5包括转向球51、偏向电动推杆52和固定圈53;转向球51与驱动电机2的底部固连且与机架1之间球铰接;固定圈53套在驱动电机2的外侧且与驱动电机2固连;固定圈53的外侧均匀地铰接偏向电动推杆52;偏向电动推杆52的另一端均与机架1相铰接;
46.研磨刀具4为一套刀具,包括一号刀具41、二号刀具42和三号刀具43;一号刀具41、二号刀具42和三号刀具43均能够穿过二号齿轮31并且与二号齿轮31相卡合;
47.工作时,现市场上的电极帽修磨装置都只能对顶端形状为球形的常规型号的电极帽进行修磨,无法对特殊形状的电极帽无法进行修磨,例如偏心电极帽和前端形状为棱台形状的电极帽;
48.工作人员在更换焊接机器人上的不同型号的电极帽的同时,更换本装置上对应的研磨刀具4;当工作人员更换的电极帽为偏心电极帽时,工作人员将原本的一号刀具41从二号齿轮31内抽出,再将二号刀具42插入二号齿轮31内,从而完成研磨刀具4的更换;同理当工作人员更换的电极帽为四棱柱形电极帽时,将三号刀具43插入二号齿轮31内;
49.因此,焊接机器人在焊接工件一段时间后,焊枪部分的电极帽因长时间焊接工件而被氧化和产生毛刺,从而焊接机器人的控制器在焊接机器人达到一定的焊接次数后(例如200次),控制焊接机器人将焊接部分的电极帽伸到本装置的研磨刀具4的两侧,接着本装置的控制器控制驱动电机2转动;
50.当焊接机器人使用的电极帽为顶端形状为球形的常规的电极帽时,驱动电机2带动一号齿轮3转动,一号齿轮3带动二号齿轮31转动,二号齿轮31带动相卡合的一号刀具41转动,接着焊接机器人的控制器控制焊枪部分带动电极帽进入一号刀具41内,从而一号刀具41转动的同时对上下两个电极帽与工件接触的端部进行切削研磨,削去电极帽表面因焊接而产生的氧化层等影响焊接质量的杂质;
51.将固定圈53上铰接的四个偏向电动推杆52分别编号为1号、2号、3号和4号;当焊接机器人使用的电极帽为偏心电极帽时,本发明的控制器控制偏向电动推杆52来使驱动电机2带着二号刀具42产生移动,将二号刀具42所在的水平面想象成坐标轴,二号刀具42为坐标轴的原点;当控制器控制1号偏向电动推杆52伸出,3号偏向电动推杆52收缩时,相当于二号刀具42沿着坐标轴上的x轴正向移动,相反则沿着x轴的负向移动;同理4号偏向电动推杆52伸出,2号偏向电动推杆52收缩,相当于二号刀具42沿着y轴的正向移动,相反则沿着y轴负方向移动,因此1号偏向电动推杆52和3号偏向电动推杆52控制着二号刀具42在x轴上的移动轨迹,2号偏向电动推杆52和4号偏向电动推杆52控制着二号刀具42在y轴上的移动轨迹,从而控制器通过控制四个偏向电动推杆52不同的伸缩状态,来控制驱动电机2的移动轨迹,使得二号刀具42围绕着偏心电极帽运动,并且二号刀具42始终与偏心电极帽贴合,从而驱动电机2带着二号刀具42转动时对偏心电极帽进行切削研磨;
52.当焊接机器人使用的电极帽为四棱台形时,原理与上述情况相同,控制器首先控制1号偏向电动推杆52和3号偏向电动推杆52推动驱动电机2,使驱动电机2带着三号刀具43倾斜设置,接着焊接机器人控制电极帽的斜面与三号刀具43贴合,随后控制器控制2号偏向电动推杆52伸出和4号偏向电动推杆52收缩,从而三号刀具43沿着四棱台形电极帽的斜面移动,此时三号刀具43与四棱台形电极帽接触的部分相当于铣刀,将四棱台形电极帽的表面铣去;当四棱台形电极帽的侧面切削研磨完成后焊接机器人控制四棱台形电极帽的顶面与三号刀具43的顶面接触,从而三号刀具43对四棱台形电极帽的顶面进行切削研磨;
53.本发明通过在焊接机器人更换不同规格的电极帽的同时,更换相对应的研磨刀具4;在对常规的电极帽进行切削研磨时,驱动电机2带动一号刀具41转动,在对偏心电极帽进行切削研磨时,1号偏向电动推杆52、2号偏向电动推杆52、3号偏向电动推杆52和4号偏向电动推杆52推动驱动电机2,使得驱动电机2带着二号刀具42围绕偏心电极帽转动,对偏心电极帽进行切削研磨;在对四棱台形电极帽进行切削研磨时,四个偏向电动推杆52再次推动驱动电机2,使得三号刀具43沿着四棱台形电极帽的四个斜面移动,再对四棱台形电极帽的顶端面进行切削研磨,从而使得本装置能够对常规电极帽、偏心电极帽和四棱台形电极帽进行切削研磨,扩大了原本机器人电极帽自动整形装置的适用范围。
54.本实施例中,二号刀具42由一号块44和二号块45组成;一号块44的底端对称开设有弹簧槽46;弹簧槽46内固连有一号弹簧47;一号弹簧47的另一端与二号块45固连;
55.在驱动电机2通过一号齿轮3和二号齿轮31带动二号刀具42转动时,二号块45与偏心电极帽接触并且在偏心电极帽推力作用下拉伸一号弹簧47,从而二号块45与偏心电极帽
的端面贴合,防止出现二号刀具42由于跟随驱动电机2一同倾斜,底端不与偏心电极帽贴合情况出现,造成偏心电极帽的端面切削研磨不完全的情况。
56.本实施例中,转向球51的底端开设有贯穿槽54;机架1内固连有能够插入贯穿槽54内的固定电动推杆55;
57.二号齿轮31上开设有圆柱形的通槽6;通槽6贯穿二号齿轮31,通槽6的槽壁上开设有卡合槽61;一号刀具41、二号刀具42和三号刀具43均能够与卡合槽61相卡合;一号刀具41、二号刀具42和三号刀具43与通槽6之间有缝隙;
58.驱动电机2的底端外侧固连有喇叭形状的波纹块7;波纹块7的另一端与机架1固连;
59.二号刀具42的一号块44与卡合槽61相卡合;在本装置对顶端为圆球形状的电极帽进行切削研磨时,固定电动推杆55插入贯穿槽54内,从而固定电动推杆55再次对驱动电机2固定,防止出现在驱动电机2带着一号刀具41转动时,偏向电动推杆52两端铰接处因驱动电机2长期振动而产生机械磨损,进而使驱动电机2晃动的情况发生;一号刀具41、二号刀具42和三号刀具43与通槽6之间设有缝隙,使得在切削研磨电极帽时产生的碎削能够缝隙落下,防止碎削堆积,影响研磨效果,同时,波纹块7由橡胶制成,将转向球51罩住,从而防止切削研磨电极帽时产生的碎削进入转向球51与机架1之间的缝隙内,从而影响转向球51的转向效果。
60.本实施例中,安装架21上固连有毛刷8;毛刷8均匀地固连在安装架21的上端面并且环绕安装架21上的开孔;
61.三号刀具43由三号块48和四号块49组成;三号块48与卡合槽61相卡合;四号块49与三号块48之间滑动连接;四号块49与三号块48之间设置压缩弹簧81且压缩弹簧81的两端分别与三号块48和四号块49固连;四号块49的形状为固连有铣刀的横板;
62.三号块48与卡合槽61相卡合;在安装架21上固连毛刷8,从而在电极帽伸入二号齿轮31内时,毛刷8将上方的电极帽包裹,从而切削研磨产生的碎削被毛刷8挡住,使得碎削只能从与通槽6之间的缝隙落下,从而防止碎削飞溅;
63.四号块49和三号块48之间通过压缩弹簧81连接,从而在三号刀具43对四棱台形电极帽的端面进行切削时,四号块49在与四棱台形电极帽接触后被四棱台形电极帽推动,从而四号块49压缩压缩弹簧81,对四棱台形电极帽的端面进行切削研磨;四号块49被四棱台形电极帽推动的距离相关,当四棱台形电极帽的端面经过多次的切削研磨后,四棱台形电极帽的整体长度变短,若三号块48设置为位置固定,从而将不能对经过多次切削研磨过后的四棱台形电极帽的端面进行切削研磨,本装置将四号块49和三号块48之间通过压缩弹簧81进行连接,使得四号块49始终能够与四棱台形电极帽的端面接触,进而不会出现上述情况。
64.实施例2:
65.与实施例1相比,本实施例的区别在于:
66.一种机器人电极帽自动整形装置,包括:
67.机架1;
68.驱动电机2;驱动电机2的输出轴固连有一号齿轮3;
69.安装架21;安装架21与驱动电机2固连,安装架21内通过环形块22转动连接有二号
齿轮31;环形块22的两端分别与二号齿轮31固连和安装架21转动连接;
70.研磨刀具4;研磨刀具4对称地安装在二号齿轮31的上,用于对电极帽进行切削研磨;
71.控制器;用于控制本发明中电器元件的运行;
72.驱动电机2通过调整装置5安装在机架1上,使得驱动电机2本体能够360
°
方向转动。
73.本实施例中,研磨刀具4为一套刀具,包括第一刀具9、第二刀具91和第三刀具92;第一刀具9上下两端向内凹陷,凹陷的底部为圆弧状;第二刀具91上端向下凹陷的形状与第一刀具9相同,第二刀具91下端向内凹陷,凹陷的截面形状为等腰梯形,第二刀具91下端能够对顶端形状为圆台形的电极帽进行研磨;第三刀具92上端向内凹陷的形状与第一刀具9相同,第三刀具92下端同样向内凹陷,凹陷的形状为等腰梯形,第三刀具92的下端能够对顶端形状为圆柱形的电极帽进行研磨。
74.本实施例中,二号齿轮31上开设有圆柱形的通槽6;通槽6贯穿二号齿轮31,通槽6的槽壁上开设有贯穿二号齿轮31的卡合槽61;第一刀具9、第二刀具91和第三刀具92均能够与卡合槽61相卡合。
75.当焊接机器人焊接一段时间后,驱动电机2带动一号齿轮3和二号齿轮31转动,从而二号齿轮31上的研磨刀具4也随之转动,焊接机器人将电极帽伸入研磨刀具4内并且电极帽与研磨刀具4接触产生压力,从而研磨刀具4对其进行研磨;
76.工作人员能够将原本的第一刀具9从卡合槽61内取出,再将需要更换的第二刀具91或第三刀具92塞入卡合槽61内,并且在与卡合槽61之间摩擦力的作用下固定住,从而完成研磨刀具4的更换;
77.第一刀具9的上下两端能够对顶端形状为圆弧形的电极帽进行研磨;第二刀具91的上端能够对顶端形状为圆弧形的电极帽进行研磨,第二刀具91的下端能够对顶端形状为圆台形的电极帽进行研磨;第三刀具92的上端能够对顶端形状为圆弧形的电极帽进行研磨,第三刀具92的下端能够对顶端形状为圆柱形的电极帽进行研磨;因此,能够通过更换研磨刀具4使得研磨刀具4与电极帽的形状相匹配;相较于现有技术只能对一幅形状相同的电极帽进行研磨,本发明能够对焊接机器人上安装的一幅不同形状的电极帽进行研磨,从而扩大了本发明的适用范围。
78.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图1中所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制,此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
79.以上显示和描述了本发明的基本原理、主要特征和优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
