技术特征:
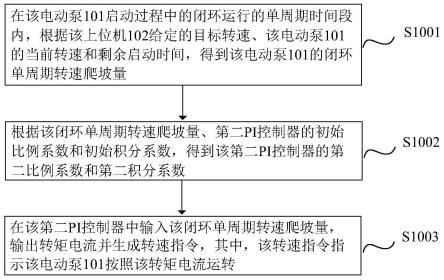
1.一种控制方法,应用于电动泵与上位机交互系统,其特征在于,所述方法包括:在所述电动泵启动过程中的闭环运行的单周期时间段内,根据所述上位机给定的目标转速、所述电动泵的当前转速和剩余启动时间,得到所述电动泵的闭环单周期转速爬坡量;根据所述闭环单周期转速爬坡量、pi控制模型的初始比例系数和初始积分系数,得到所述pi控制模型的比例系数和积分系数;在所述pi控制模型中输入所述闭环单周期转速爬坡量,输出转矩电流并生成转速指令,其中,所述转速指令指示设置在所述电动泵内的电机按照所述转矩电流运转。2.根据权利要求1所述的方法,其特征在于,所述根据所述上位机给定的目标转速、所述电动泵的当前转速和剩余启动时间,得到所述电动泵的闭环单周期转速爬坡量包括:close_rampspeed=(ecu_target_speed-currrent_speed)/tleft,其中,close_rampspeed为所述闭环单周期转速爬坡量,ecu_target_speed为所述上位机给定的目标转速,currrent_speed为所述电动泵的当前转速;tleft为所述剩余启动时间。3.根据权利要求2所述的方法,其特征在于,所述剩余启动时间的确定过程包括:tleft=t-ta-topen-k*tsc,其中,t为所述电动泵的总启动时间,ta为所述电动泵的预定位时间,topen为所述电动泵的开环运行时间,k为所述电动泵的闭环已运行周期数,tsc为所述电动泵的闭环单周期转速爬坡时间;所述电动泵的开环运行时间的确定过程包括:topen=openmodespeed/open_rampspeed*tso,其中,openmodespeed为所述电动泵由开环运行切换成闭环运行时的转速量,open_rampspeed为所述电动泵的开环单周期转速爬坡量,tso为所述电动泵的开环单周期转速爬坡时间。4.根据权利要求1~3任一项所述的方法,其特征在于,所述根据所述闭环单周期转速爬坡量、pi控制模型的初始比例系数和初始积分系数,得到所述pi控制模型的比例系数和积分系数包括:根据所述闭环单周期转速爬坡量和所述电动泵的当前转速,得到闭环单周期电动泵目标转速;根据所述闭环单周期电动泵目标转速和所述闭环单周期转速爬坡量,得到调节因子;根据所述调节因子、所述初始比例系数和所述初始积分系数,得到所述比例系数和所述积分系数。5.根据权利要求4所述的方法,其特征在于,所述比例系数和所述积分系数确定过程包括:target_speed=currrent_speed close_rampspeed,其中,target_speed为所述闭环单周期电动泵目标转速,currrent_speed为所述电动泵的当前转速,close_rampspeed为所述闭环单周期转速爬坡量;λ=1 close_rampspeed/target_speed,其中,λ为所述调节因子;k
p
=k
pinit
*λ,k
i
=k
iinit
*λ,
其中,k
p
为所述比例系数,k
pinit
为所述初始比例系数,k
i
为所述积分系数,k
iinit
为所述初始积分系数。6.根据权利要求4所述的方法,其特征在于,在所述电动泵启动过程中的闭环运行前所述方法还包括:在所述上位机给定的目标转速大于0的情况下,所述电动泵开始预定位,固定设于所述电动泵内的电机的转子的初始启动位置;在所述预定位后,所述电动泵开环运行直至所述电动泵内的电机转速大于设定转速,所述电动泵闭环运行。7.一种控制系统,应用于电动泵与上位机交互系统,其特征在于,所述系统包括mcu:所述mcu在所述电动泵启动过程中的闭环运行的单周期时间段内,根据所述上位机给定的目标转速、所述电动泵的当前转速和剩余启动时间,得到所述电动泵的闭环单周期转速爬坡量;所述mcu根据所述闭环单周期转速爬坡量、pi控制模型的初始比例系数和初始积分系数,得到所述pi控制模型的比例系数和积分系数;所述mcu在所述pi控制模型中输入所述闭环单周期转速爬坡量,输出转矩电流并生成转速指令,其中,所述转速指令指示设置在所述电动泵内的电机按照所述转矩电流运转。8.根据权利要求7所述的系统,其特征在于,所述mcu根据所述上位机给定的目标转速、所述电动泵的当前转速和剩余启动时间,得到所述电动泵的闭环单周期转速爬坡量包括:close_rampspeed=(ecu_target_speed-currrent_speed)/tleft,其中,close_rampspeed为所述闭环单周期转速爬坡量,ecu_target_speed为所述上位机给定的目标转速,currrent_speed为所述电动泵的当前转速;tleft为所述剩余启动时间。9.根据权利要求8所述的系统,其特征在于,所述剩余启动时间的确定过程包括:tleft=t-ta-topen-k*tsc,其中,t为所述电动泵的总启动时间,ta为所述电动泵的预定位时间,topen为所述电动泵的开环运行时间,k为所述电动泵的闭环已运行周期数,tsc为所述电动泵的闭环单周期转速爬坡时间;所述电动泵的开环运行时间的确定过程包括:topen=openmodespeed/open_rampspeed*tso,其中,openmodespeed为所述电动泵由开环运行切换成闭环运行时的转速量,open_rampspeed为所述电动泵的开环单周期转速爬坡量,tso为所述电动泵的开环单周期转速爬坡时间。10.根据权利要求7~9任一项所述的系统,其特征在于,所述mcu根据所述闭环单周期转速爬坡量、pi控制模型的初始比例系数和初始积分系数,得到所述pi控制模型的比例系数和积分系数包括:所述mcu根据所述闭环单周期转速爬坡量和所述电动泵的当前转速,得到闭环单周期电动泵目标转速;所述mcu根据所述闭环单周期电动泵目标转速和所述闭环单周期转速爬坡量,得到调节因子;
所述mcu根据所述调节因子、所述初始比例系数和所述初始积分系数,得到所述比例系数和所述积分系数;所述比例系数和所述积分系数确定过程包括:target_speed=currrent_speed close_rampspeed,其中,target_speed为所述闭环单周期电动泵目标转速,currrent_speed为所述电动泵的当前转速,close_rampspeed为所述闭环单周期转速爬坡量;λ=1 close_rampspeed/target_speed,其中,λ为所述调节因子;k
p
=k
pinit
*λ,k
i
=k
iinit
*λ,其中,k
p
为所述比例系数,k
pinit
为所述初始比例系数,k
i
为所述积分系数,k
iinit
为所述初始积分系数。
技术总结
本申请涉及一种控制方法和系统,该控制方法包括,根据上位机给定的目标转速、该电动泵的当前转速和剩余启动时间,得到该电动泵的闭环单周期转速爬坡量;根据该闭环单周期转速爬坡量、PI控制模型的初始比例系数和初始积分系数,得到该PI控制模型的比例系数和积分系数;通过本申请,解决了电动泵固定时间启动时,启动时间设置较长会造成启动时间浪费,启动时间设置较短可能造成电动泵启动失败的问题,实现电动泵在不同负载下的固定时间启动,并在保证电动泵启动成功的情况下,缩短启动时间,从而降低静态电流,节约能源。节约能源。节约能源。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:杭州三花研究院有限公司
技术研发日:2021.01.15
技术公布日:2022/7/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。