1.本发明涉及触觉传感器技术领域,具体涉及一种柔性触觉传感器及其制备方法和应用。
背景技术:
2.触觉传感器是用于模仿触觉功能的传感器,按功能可以分为接触觉传感器、力-力矩觉传感器、压觉传感器和滑觉传感器等,其在电子皮肤、健康监测、医疗诊断和仿生机器人等领域具有广阔的应用前景。柔性触觉传感器是一类具有优良柔韧性的触觉传感器,从传感机制划分主要包括压阻式、压容式、压电式和摩擦电式,是近些年来的研究热点。
3.目前,为了实现压电式触觉传感器的柔性化,通常采用聚酰亚胺(pi)和聚二甲基硅氧烷(pdms)等柔性材料充当传感器的基底材料。pi具有良好的弯曲性能和耐高温性能,但可拉伸性差,不适用于拉伸应变应用场合。pdms具有拉伸延展性好、透明度高、无毒、易成型、生物相容性好等优点,但由于其能够承受的加工温度在-50℃~200℃之间,导致器件加工过程无法采用较高温度的退火等工艺,器件的性能受到影响、应用受到很大限制。
4.柔性压电敏感层是柔性压电式触觉传感器的关键部件,其需要具备高压电常数和优异的柔韧性。聚偏氟乙烯(pvdf)等有机聚合物压电材料具有优异的柔韧性,适用于柔性触觉传感器,但其压电常数相对较低,难以满足高灵敏度的传感器应用需求。无机pzt基陶瓷压电材料具有相对较高的压电常数,已被广泛应用于压电式传感器,但其本身易脆,无法在柔性传感器中应用。另外,现有的压电式触觉传感器结构大都采用的是三明治器件结构(压电敏感层夹在上、下电极之间),该结构的传感器在应用过程中外力会直接作用于器件的电极表面,外力的频繁冲击会引起电极层与压电敏感层之间发生界面退化,甚至发生分离的现象,严重影响传感器的可靠性和耐用性。
5.因此,开发一种结构新颖、灵敏度高、柔韧性好、拉伸性好、稳定性高的柔性触觉传感器具有十分重要的意义。
技术实现要素:
6.本发明的目的在于提供一种柔性触觉传感器及其制备方法和应用。
7.本发明所采取的技术方案是:
8.一种柔性触觉传感器,组成包括依次层叠设置的第一柔性包封层、柔性基底、压电敏感层、电极层和第二柔性包封层;所述柔性基底为单层云母片;所述压电敏感层为zno纳米棒阵列层;所述电极层具有共面横向结构。
9.优选的,所述第一柔性包封层为厚度100nm~500nm的聚二甲基硅氧烷(pdms)薄膜。
10.优选的,所述压电敏感层的厚度为2μm~5μm。
11.优选的,所述zno纳米棒阵列层由zno纳米棒或者al、sn、mg、v中的至少一种掺杂的zno纳米棒构成。
12.优选的,所述电极层的组成材料选自银、金、石墨烯、聚(3,4-乙烯二氧噻吩)-聚苯乙烯磺酸(pedot:pss)中的至少一种。
13.优选的,所述第二柔性包封层为厚度100nm~500nm的聚二甲基硅氧烷薄膜。
14.上述柔性触觉传感器的制备方法包括以下步骤:
15.1)在云母片的一面制备zno种子层,再进行退火;
16.2)将锌盐、六次甲基四胺和掺杂剂加水分散制成前驱体溶液,再将步骤1)处理过的云母片浸入前驱体溶液中进行水热反应形成zno纳米棒阵列层,再将云母片取出进行退火;
17.3)在zno纳米棒阵列层远离云母片的那一面的两侧形成共面横向结构电极;
18.4)将柔性包封材料涂覆在形成有共面横向结构电极的zno纳米棒阵列层上,形成柔性包封层;
19.5)将云母片的另一面剥离直至保留单层云母片,再涂覆柔性包封材料形成柔性包封层,
20.即得柔性触觉传感器。
21.优选的,步骤1)所述云母片进行过以下前处理操作:先依次用丙酮、乙醇和去离子水对云母片进行超声清冼,再用氮气吹干。
22.优选的,步骤1)所述zno种子层采用磁控溅射法制备。
23.优选的,步骤1)所述zno种子层的组成材料选自zno、al掺杂zno、sn掺杂zno、mg掺杂zno、v掺杂zno中的一种。
24.优选的,步骤1)所述zno种子层的厚度为20nm~40nm。
25.优选的,步骤1)所述退火在200℃~600℃下进行。
26.优选的,步骤1)所述退火在空气气氛、氧气气氛或氮气气氛中进行。
27.优选的,步骤2)所述锌盐选自硝酸锌、醋酸锌中的至少一种。
28.进一步优选的,步骤2)所述锌盐为六水硝酸锌。
29.优选的,步骤2)所述掺杂剂选自锡盐、镁盐、钒盐中的至少一种。
30.进一步优选的,步骤2)所述掺杂剂选自sncl4·
4h2o、mg(no3)2·
6h2o、voso4中的至少一种。
31.优选的,步骤2)所述水热反应在85℃~95℃下进行,反应时间为3h~5h。
32.优选的,步骤2)所述退火在200℃~600℃下进行。
33.优选的,步骤2)所述退火在空气气氛、氧气气氛或氮气气氛中进行。
34.优选的,步骤3)所述共面横向结构电极采用真空蒸镀工艺、丝网印刷工艺或3d打印工艺制备。
35.一种可穿戴电子设备,其组成包括上述柔性触觉传感器。
36.本发明的柔性触觉传感器的工作原理:柔性触觉传感器受到外界压力时,由zno纳米棒阵列组成的压电敏感层的晶体结构会发生变形,进而导致电偶极矩的分离,感应的电荷量在电极层积累,再经电荷放大器把电荷信号转换为电压信号传送给后端处理电路,最终实现触觉传感功能。
37.本发明的有益效果是:本发明的柔性触觉传感器具有灵敏度高、分辨率高、柔韧性高、稳定性高、拉伸性好、成本低廉等优点,且其制备工艺简单,能够大面积阵列化制备,在
仿生机器人、可穿戴电子器件、人工智能和医疗健康监测等多个领域具有广阔的应用前景。
38.具体来说:
39.1)本发明的柔性触觉传感器采用单层云母片作为基底材料,其具有优异的柔韧性(云母片具有易层层剥离的特性,在器件制造过程中对云母基底减薄至单层结构可以使器件具备优异的柔韧性),且能够承受超过1000℃的高温,因此基于云母片基底生长的zno种子层和zno纳米棒均可以通过较高温度退火处理来优化纳米棒结晶性、结构形貌和缺陷含量等,从而可以提高压电敏感层的压电特性;
40.2)本发明的柔性触觉传感器采用pdms作为柔性包封材料,相较于pi和环氧树脂,pdms包覆的传感器在受到相同的外界压力时会产生更大的形变量,进而可以输出更大的电压;
41.3)本发明的柔性触觉传感器采用了共面横向电极结构,相较于三明治结构,不仅降低了器件制备过程中电极短路的情况,提高了器件的成品率,而且还可以避免外力作用导致的电极与压电薄膜层之间界面退化甚至分离现象,提高了器件的稳定性和耐久性;
42.4)本发明的柔性触觉传感器的制备工艺简单,成本低,适合大面积、阵列化制作,解决了压电层需要高温退火和基底层不耐高温之间的矛盾,实现了器件的高灵敏度、高柔韧性和高拉伸性,有效提高了器件的稳定性,更加适合用于各种可穿戴智能电子系统、机器人感知系统和生物医学器件。
附图说明
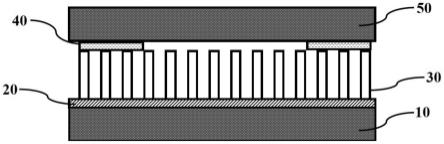
43.图1为本发明的柔性触觉传感器的截面的结构示意图。
44.图2为本发明的柔性触觉传感器的立体结构示意图。
45.图3为本发明的柔性触觉传感器的制备流程图。
46.附图标识说明:10、第一柔性包封层;20、柔性基底;30、压电敏感层;40、电极层;50、第二柔性包封层。
47.图4为实施例1的柔性触觉传感器的实物图。
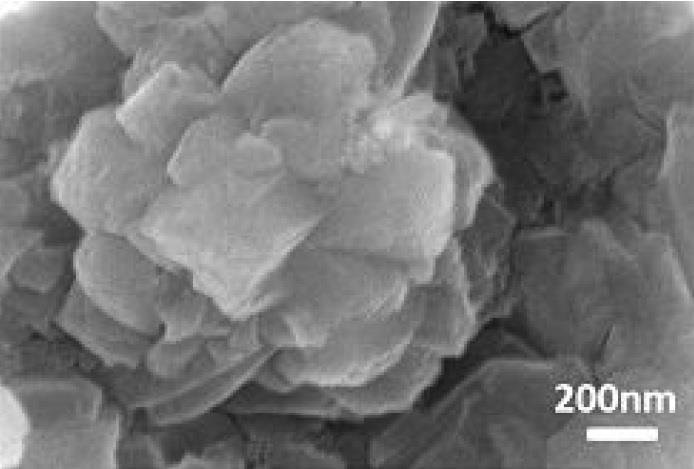
48.图5为实施例1的柔性触觉传感器中的mg掺杂zno纳米棒阵列层的sem图。
49.图6为实施例1的柔性触觉传感器的压力响应图。
具体实施方式
50.下面结合具体实施例对本发明作进一步的解释和说明。
51.实施例1:
52.一种柔性触觉传感器(截面的结构示意图如图1所示,立体结构示意图如图2所示),组成包括依次层叠设置的第一柔性包封层10、柔性基底20、压电敏感层30、电极层40和第二柔性包封层50;第一柔性包封层10为聚二甲基硅氧烷薄膜;柔性基底20为单层云母片;压电敏感层30为mg掺杂zno纳米棒阵列层;电极层40具有共面横向结构;第一柔性包封层50为聚二甲基硅氧烷薄膜。
53.上述柔性触觉传感器的制备方法包括以下步骤(制备流程图如图3所示):
54.1)将云母片依次用丙酮、乙醇和去离子水分别超声清洗15min,再用氮气吹干,再采用磁控溅射法在云母片的一面制备厚度为40nm的zno种子层,磁控溅射采用的靶材的材
质为zno,工作压力为0.5pa,氧气流通量为20sccm,氩气流通量为30sccm,功率为75w,预溅射10min后正式溅射5min,再将云母片置于入管式炉中,充入洁净的空气,500℃退火1h;
55.2)将1.05g的六水硝酸锌、2.23g的六次甲基四胺和200μl浓度为25mmol/l的mg(no3)2·
6h2o溶液加入100ml的去离子水中,搅拌分散制成前驱体溶液,再将步骤1)处理过的云母片和前驱体溶液加入聚四氟乙烯内衬的反应釜中,90℃反应4h,形成mg掺杂zno纳米棒阵列层(压电敏感层),再取出云母片用去离子水清洗3次,再将云母片置于入管式炉中,充入洁净的空气,300℃退火1h;
56.3)采用硬掩膜板真空蒸镀法在mg掺杂zno纳米棒阵列层远离云母片的那一面的两侧蒸镀银电极和金电极形成共面横向结构电极(电极层);
57.4)将pdms胶(道康宁sylgard 184)的主剂和固化剂按照质量比10:1混合后进行脱泡制成柔性包封材料,再将柔性包封材料旋涂在形成有共面横向结构电极的mg掺杂zno纳米棒阵列层上,涂覆厚度为200nm,再置于真空干燥箱中80℃抽真空处理30min,形成pdms薄膜层(第二柔性包封层);
58.5)采用胶带将云母片的另一面层层剥离直至保留单层云母片(柔性基底),再旋涂步骤4)的柔性包封材料,涂覆厚度为200nm,再置于真空干燥箱中80℃抽真空处理30min,形成pdms薄膜层(第一柔性包封层),即得柔性触觉传感器(实物图如图4所示)。
59.性能测试:
60.1)本实施例的柔性触觉传感器中的mg掺杂zno纳米棒阵列层的扫描电镜(sem)图如图5所示。
61.由图5可知:mg掺杂zno纳米棒阵列层的厚度约为2.45μm,其中的mg掺杂zno纳米棒排列规整。
62.2)对本实施例的柔性触觉传感器进行稳定性测试,通过步进电机产生固定频率周期性加载的压力,进行3000次敲击的压力响应图如图6所示。
63.由图6可知:本实施例的柔性触觉传感器在进行3000次循环后,输出电压几乎没有变化,说明其具有优异的性能稳定性和耐久性。
64.实施例2:
65.一种柔性触觉传感器,除了在制备过程中将步骤1)中的磁控溅射靶材的材质由zno替换成zno和al(即zno种子层的组成材料为al掺杂zno)以外,其它和实施例1完全一样。
66.经测试,本实施例的柔性触觉传感器在施加压力为0.5n时,输出的压电电压为228.0mv。
67.实施例3:
68.一种柔性触觉传感器,除了在制备过程中将步骤2)中的mg(no3)2·
6h2o溶液替换成同体积同浓度的voso4溶液以外,其它和实施例1完全一样。
69.经测试,本实施例的柔性触觉传感器在施加压力为0~1n时,灵敏度为1424.1mv/n。
70.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。