一种适用于对pc膜片切割的装置
技术领域
1.本实用新型是一种适用于对pc膜片切割的装置,属于pc膜片加工领域。
背景技术:
2.pc膜是聚碳酸酯膜的简称,它是一种无定型、无臭、无毒、高度透明的无色或微黄色热塑性工程塑料。目前,pc膜片切割过程中,一般将pc膜片置于连接在机器人手臂上的托盘上,然后利用机器人手臂将托盘移动至激光切割机切割头下方,从而利用激光切割机对pc膜片进行切割。托盘一般采用螺丝固定在机器人手臂上,但托盘上用于连接螺丝的螺纹孔位置与托盘位置的相对位置固定,不能根据机器人手臂上用于穿插螺丝的孔洞的间距进行调整,容易出现托盘上的螺纹孔与机器人手臂上用于穿插螺丝的孔洞不对齐的情况,影响托盘与机器人手臂的连接。
技术实现要素:
3.针对现有技术存在的不足,本实用新型目的是提供一种适用于对pc膜片切割的装置,以解决上述背景技术中提出的问题,本实用新型实现根据机器人手臂上用于穿插螺丝的孔洞的间距调整托盘上螺纹孔的位置。
4.为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种适用于对pc膜片切割的装置,包括用于支撑pc膜片的托盘,所述托盘底部边缘处固定连接有边框,所述边框内滑动安装有两个滑板,两个所述滑板的相对面均开设有圆孔,所述圆孔内安插有螺纹杆,所述螺纹杆的两端均固定在边框内壁上,所述螺纹杆与滑板垂直布置,所述圆孔两侧均设有限位螺母,所述限位螺母螺纹连接在螺纹杆上,所述滑板背离托盘的一面设有两个用于连接机器人手臂的连接座,所述连接座背离滑板的一面开设有用于连接螺丝的螺纹孔,所述连接座通过插接件与滑板相插接且连接座通过夹紧螺栓与滑板固定连接。
5.进一步地,所述插接件包括燕尾榫条,所述燕尾榫条固定在滑板背离托盘的一面,所述燕尾榫条沿着滑板的长度方向布置,所述燕尾榫条安插在燕尾榫槽内,所述燕尾榫槽开设在连接座面向滑板的一面,所述燕尾榫槽背离滑板的一侧设有与连接座固定连接的夹板,所述夹板与燕尾榫条滑动接触且夹板面向燕尾榫条的一面开设有螺孔,所述夹紧螺栓螺纹连接在螺孔内。
6.进一步地,所述燕尾榫条面向滑板的一面固定连接有多个插杆,所述插杆固定在插孔内,所述插孔开设在滑板面向燕尾榫条的一面。
7.进一步地,所述插杆靠近燕尾榫条的一端外表面加工有外螺纹,所述燕尾榫条安装插杆的位置处开设有螺纹盲孔,所述插杆加工外螺纹的一端螺纹连接在螺纹盲孔内。
8.进一步地,所述夹板背离燕尾榫条的一面焊接有三角板,所述三角板与连接座固定连接。
9.进一步地,所述边框为矩形状结构,所述边框与托盘为一体成型结构。
10.本实用新型的有益效果:
11.1、调整两个滑板之间的间距,进而螺纹杆相对于滑板在圆孔内滑动,当两个滑板上的连接座之间的间距满足需要后,拧动滑板两侧的螺母使滑板两侧的螺母均与滑板贴合,完成滑板位置的固定,即两个滑板上连接座的间距被限制。
12.2、沿着滑板的长度方向调整连接座的位置,进而滑板上的两个连接座的间距增加或缩小,即两个连接座上螺纹孔的间距发生改变,直至螺纹孔的间距满足机器人手臂上用于穿插螺丝的孔洞间距的需要,然后利用夹紧螺栓固定连接座的位置,最终实现根据机器人手臂上用于穿插螺丝的孔洞的间距调整托盘上螺纹孔的位置。
附图说明
13.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
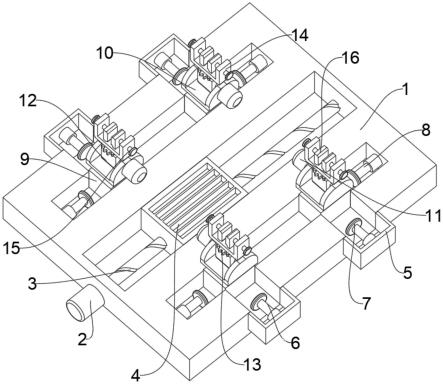
14.图1为本实用新型一种适用于对pc膜片切割的装置的结构示意图;
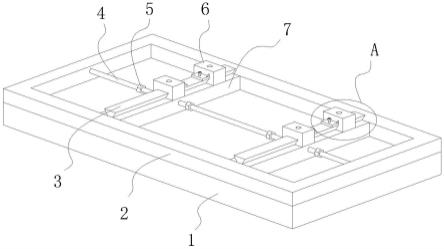
15.图2为本实用新型一种适用于对pc膜片切割的装置中a处放大图;
16.图3为本实用新型一种适用于对pc膜片切割的装置中燕尾榫条与滑板的装配示意图;
17.图4为本实用新型一种适用于对pc膜片切割的装置中连接座的立体图;
18.图5为本实用新型一种适用于对pc膜片切割的装置中夹板的立体图;
19.图6为本实用新型一种适用于对pc膜片切割的装置中插杆、燕尾榫条和滑板的装配示意图;
20.图中:1-托盘、2-边框、3-滑板、4-螺纹杆、5-螺母、6-连接座、7-滑板、8-夹紧螺栓、9-夹板、10-螺纹孔、11-圆孔、12-燕尾榫槽、13-螺孔、14-插杆、15-插孔。
具体实施方式
21.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
22.请参阅图1,本实用新型提供一种技术方案:一种适用于对pc膜片切割的装置,包括用于支撑pc膜片的托盘1,托盘1底部边缘处固定连接有边框2,边框2为矩形状结构,边框2与托盘1为一体成型结构,采用一体成型结构,提高结构的机械强度。
23.参阅图1和图3,边框2内滑动安装有两个滑板7,两个滑板7的相对面均开设有圆孔11,圆孔11内安插有螺纹杆4,螺纹杆4的两端均固定在边框2内壁上,螺纹杆4与滑板7垂直布置,圆孔11两侧均设有限位螺母5,限位螺母5螺纹连接在螺纹杆4上,调整两个滑板7之间的间距,进而螺纹杆4相对于滑板7在圆孔11内滑动,当两个滑板7上的连接座6之间的间距满足需要后,拧动滑板7两侧的螺母5使滑板7两侧的螺母5均与滑板7贴合,完成滑板7位置的固定,即两个滑板7上连接座6的间距被限制。
24.参阅图1、图2、图3、图4和图5,滑板7背离托盘1的一面设有两个用于连接机器人手臂的连接座6,连接座6背离滑板7的一面开设有用于连接螺丝的螺纹孔10,滑板7背离托盘1的一面固定连接有燕尾榫条3,燕尾榫条3沿着滑板7的长度方向布置,将燕尾榫条3安插在燕尾榫槽12内,实习连接座6与滑板7的插接,起到限制连接座6移动轨迹的作用,燕尾榫槽12开设在连接座6面向滑板7的一面,燕尾榫槽12背离滑板7的一侧设有与连接座6固定连接
的夹板9,夹板9背离燕尾榫条3的一面焊接有三角板,三角板与连接座6固定连接,在夹板9与连接座6之间安装三角板,提高夹板9与连接座6连接的机械强度,夹板9与燕尾榫条3滑动接触且夹板9面向燕尾榫条3的一面开设有螺孔13,螺孔13内螺纹连接有用于限制连接座6位置的夹紧螺栓8,沿着滑板7的长度方向调整连接座6的位置,进而滑板7上的两个连接座6的间距增加或缩小,即两个连接座6上螺纹孔10的间距发生改变,直至螺纹孔10的间距满足机器人手臂上用于穿插螺丝的孔洞间距的需要,然后利用夹紧螺栓8固定连接座6的位置,最终实现根据机器人手臂上用于穿插螺丝的孔洞的间距调整托盘1上螺纹孔10的位置。
25.参阅图6,燕尾榫条3面向滑板7的一面固定连接有多个插杆14,插杆14固定在插孔15内,插孔15开设在滑板7面向燕尾榫条3的一面,插杆14靠近燕尾榫条3的一端外表面加工有外螺纹,燕尾榫条3安装插杆14的位置处开设有螺纹盲孔,将插杆14加工外螺纹的一端螺纹连接在螺纹盲孔内,实现插杆14与燕尾榫条3的组装,将插杆14固定在插孔15内,增加燕尾榫槽12与滑板7连接的接触面积,提高燕尾榫槽12与滑板7连接的稳定性。
26.虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。