1.本发明涉及一种包括可移动起重臂和可移动配重的起重机。本发明还涉及起重机用于将部件提升至风力涡轮机的用途。
背景技术:
2.起重机在许多不同的领域中使用,主要在建造结构、修理结构和执行结构的维护时。起重机通常在运输业中用于货物的装载和卸载,在建筑业中用于材料的移动,以及在制造业中用于重型设备的适配。
3.在风力涡轮机的维护期间也使用了起重机。风力涡轮机需要对其主要部件(诸如涡轮机叶片、发动机舱、齿轮箱和发电机)进行定期维护。这些部件的重量可以根据风力涡轮机的尺寸和类型而变化。例如,齿轮箱的重量可以在20吨至45吨之间,发电机和涡轮机叶片的重量可以在15吨至30吨之间。部件的尺寸和形状也显著不同。在风力涡轮机的维护期间,起重机必须能够在地面与风力涡轮机的顶部之间提升不同尺寸的部件。由于重量、形状和尺寸的差异,可能难以用同一个起重机来提升部件。
4.us 9,266,701 b2公开了一种用于将部件提升到风力涡轮机的起重机。该起重机包括伸缩立柱,起重机基座位于该伸缩立柱上。起重臂从起重机基座向上伸出,并且起重臂典型地从起重臂向上伸出。为了在起重机的提升期间和在起重机的竖直移动期间为起重机提供稳定性,将配重安装在起重机基座上。起重臂能够相对于起重机基座枢转,以在水平方向上移动起重臂的外端部。这种起重机的缺点是制造起来复杂且昂贵。
5.fr1323411公开了一种包括立柱的起重机,该立柱在其上端部处承载用于可移动起重臂的引导件。起重臂具有在立柱的一侧上延伸的前部部分和在立柱的相对侧上延伸的后部部分。起重臂可相对于立柱是水平可移动的,使得前部部分的长度和后部部分的长度可通过相对于立柱移动起重臂来调节。起重机包括连接至起重臂的前部部分的吊钩和安装在起重臂的后部部分上的配重。该起重机使得可以调节起重臂的前部部分的长度,并且由此使得可以到达距立柱不同距离的物体,而不必移动起重机。配重沿起重臂的后部部分的一部分是可移动的。配重和起重臂可相对于立柱在相反方向上是同时可移动的。起重臂相对于立柱的移动是通过两根缆索获得的,这两根缆索具有连接至起重臂的一个端部并且这两根缆索的其他端部附接至圆立柱形卷筒,配重的移动通过两根其他缆索获得,这两根其他缆索连接至配重并且这两根其他缆索的相对端部附接至另一圆立柱形卷筒。卷筒布置在由马达驱动的同一轴上。缆索缠绕在它们各自的卷筒上,使得当马达运行时,配重和起重臂在相反的方向上移动。通过根据起重臂相对于立柱的移动来移动配重以平衡起重机。
6.由于起重机的高可用性,总是有改进起重机的需要。
技术实现要素:
7.本发明的目的是提供一种改进的起重机。
8.该目的通过如权利要求1所限定的起重机来实现。
9.该起重机包括:立柱;细长的起重臂,该起重臂连接到立柱,该起重臂具有在立柱的一侧上延伸的前部部分和在立柱的相对侧上延伸的后部部分,并且起重臂相对于立柱是线性可移动的,使得前部部分的长度和后部部分的长度通过相对于立柱移动起重臂是可调节的;以及配重,该配重可移动地连接到起重臂。起重臂和配重布置成使得它们可独立于彼此移动,并且配重和起重臂布置成使得配重可穿过立柱并且可独立于起重臂相对于立柱的位置在前部部分和后部部分之间移动。起重机包括用于沿起重臂移动配重的第一传动系统和用于相对于立柱移动起重臂的第二传动系统,并且第一传动系统和第二传动系统布置成独立地移动配重和起重臂。
10.根据本发明,可以独立于起重臂相对于立柱的位置而在立柱的两侧上定位配重。因此,对于起重臂相对于立柱的每个可能位置,可以将配重定位在立柱的相对侧上。因为它增加了根据起重机上的负载来平衡起重机的可能性,即由吊装装置承载的重量和起重臂相对于立柱的位置,故这是有利的。该起重机可提升重型部件以及轻型部件以及不同尺寸和不同形状的部件。例如,如果待在距立柱短距离处提升部件,则起重臂移动,使得前部部分的长度变得比后部部分的长度短。因此,起重臂的后部部分的重量将比前部部分的重量重。如果部件的重量轻,则部件与前部部分的总重量可小于后部部分的重量,这使得起重机不平衡。不平衡的起重机将导致立柱上的应变。由于配重布置成可移动到位于起重臂的前部部分上的位置的事实,因此可以在这种情况下平衡起重机。另一方面,如果部件较重并且部件与前部部分的总重量大于后部部分的重量,则为了平衡起重机,配重可移动至后部部分。因此,在提升重型部件以及轻型部件时,起重机可以被平衡。
11.当起重机沿诸如建筑物或风力涡轮机的结构向上或向下移动时,因为不平衡的起重机将引起用于移动起重机的驱动机构的磨损,故这是特别重要的。当起重机移动到靠近结构顶部的工作位置和从靠近结构顶部的工作位置移动时,起重机卸载。当起重机卸载时,在起重臂的前部部分上具有配重以平衡起重机是有利的。
12.本发明的进一步的优点在于,当起重机卸载或起重机承载轻型部件时,该起重机减少了移动起重臂以实现起重机平衡的需要。移动配重比移动起重臂更好。由于配重附接至起重臂,因此相对于立柱移动起重臂意味着具有配重的起重臂移动。进一步地,起重臂的重量通常大于配重的重量。因此,相对于立柱移动起重臂需要比相对于起重臂移动配重更多的力和动力。
13.根据一些方面,配重布置成可相对于起重臂线性移动第一距离,起重臂布置成可相对于立柱线性移动第二距离,并且第一距离比第二距离长至少30%,优选地,第一距离比第二距离长至少50%,以及最优选地,第一距离是第二距离的至少两倍。因此,配重相对于起重臂比起重臂相对于立柱可移动更长的距离。这使得可以移动配重而不是移动起重臂以实现起重臂相对于立柱的平衡。前部部分的长度根据到待由起重机提升的部件的距离是可调节的,而配重用于平衡起重机。
14.配重布置成可在两个极限位置之间移动,并且第一距离为两个极限位置之间的距离。起重臂布置成可沿起重臂的一部分相对于立柱线性移动,并且第二距离为起重臂的一部分的长度。两个极限位置位于起重臂的该部分的相对侧上并且与起重臂的该部分间隔开。
15.根据一些方面,配重布置成可沿起重臂的长度的至少50%移动,优选地,配重布置
成可沿起重臂的长度的至少60%移动。最优选地,配重布置成可沿起重臂的长度的至少70%移动。起重臂的长度意指后部部分的外端部与前部部分的外端部之间的距离。因此,提高了使用配重来平衡起重机的可能性。
16.根据一些方面,该立柱包括固定部分和旋转部分,该旋转部分布置成可相对于该固定部分围绕旋转轴线旋转,起重臂可移动地连接至旋转部分,并且配重布置成可移动至前部部分上位于距旋转轴线至少1m距离的位置。优选地,配重布置成可移动到前部部分上位于距旋转轴线至少2m距离的位置。最优选地,配重布置成可移动到前部部分上位于距旋转轴线至少3m距离的位置。增加配重可在立柱前方移动的距离,增加当起重机承载低重量部件时以及当起重机卸载时使用配重平衡起重机的可能性,而不需要相对于立柱移动起重臂以实现起重机的平衡。
17.根据一些方面,起重机包括连接至起重臂的前部部分的吊装装置。起重臂的前部部分设置有吊装装置。然而,后部部分也可以设置有吊装装置。
18.根据一些方面,配重布置成可移动至后部部分的外端部。因此,可以使配重沿起重臂的后部部分的整个长度移动。这使得起重机能够提升重型部件至诸如大型风力涡轮机。
19.根据一些方面,配重设置在起重臂内,并且配重布置成可在起重臂内移动。在一方面,起重臂包括框架,该框架限定沿起重臂的长度延伸的细长内部空间,并且配重布置成可在内部空间内移动。因此,配重由起重臂的框架保护。例如,这在将起重机运输到要使用起重机的地点(诸如风力涡轮机工厂)期间是有利的。配重由框架保护。进一步地,在起重臂的前部部分和后部部分之间移动配重变得容易。
20.根据一些方面,起重机包括用于沿起重臂移动配重的第一传动系统,其中,第一传动系统包括附接至起重臂并且在起重臂的纵向方向上延伸的细长的第一齿条、以及附接至配重并且布置成与第一齿条啮合的第一齿轮、以及用于驱动第一齿轮使得第一齿轮沿第一齿条移动的第一马达。齿条的长度限定配重可相对于起重臂移动的距离。该传动系统简单可靠。进一步地,传动系统允许配重独立于起重臂的移动而移动。
21.根据一些方面,起重机包括用于使起重臂相对于立柱移动的第二传动系统,其中,第二传动系统包括附接到起重臂并且在起重臂的纵向方向上延伸的细长的第二齿条、以及附接到立柱的旋转部分并且布置成与第二齿条啮合的第二齿轮、以及用于驱动第二齿轮使得第二齿轮沿第二齿条移动的第二马达。该传动系统简单可靠。进一步地,传动系统允许起重臂独立于配重的移动而移动。
22.本发明进一步涉及根据本发明的起重机用于提升部件至风力涡轮机的用途。根据本发明的起重机特别适合于在风力涡轮机的建造和风力涡轮机的维护期间将部件提升到风力涡轮机,因为它使得能够提升重型部件和轻型部件。进一步地,起重机可以在空载状态下在地面与风力涡轮机的顶部之间竖直地移动。在这种情况下,配重移动到立柱前方的位置,以平衡空载的起重机。
附图说明
23.现在将参照附图,通过对本公开的不同实施例的描述来更详细地解释本发明。
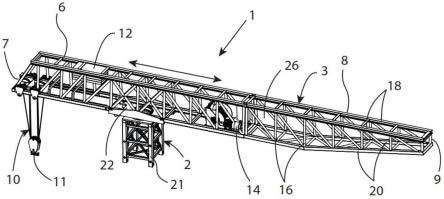
24.图1示出了根据本发明的包括可移动起重臂和可移动配重的起重机的示例的透视图,其中部分地示出了立柱。
25.图2至图5示出了图1中所示的起重机的侧视图,其中起重臂和配重处于不同位置。
26.图6以更大的比例示出了用于相对于起重臂移动配重的传动系统的示例。
27.图7以更大的比例示出了用于相对于立柱移动起重臂的传动系统的示例。
具体实施方式
28.下文将参照附图更全面地描述本公开的各方面。然而,本文中的起重机可以以许多不同的形式实现,并且不应被解释为限制于本文中所阐述的方面。附图中的相同标记始终表示相同元件。
29.本文中所使用的术语仅用于描述本公开的特定方面的目的,并不旨在限制本发明。如本文中所使用的,除非上下文另有明确指示,否则单数形式“一个”、“一种”和“该”旨在也包括复数形式。
30.除非另有限定,否则本文中所使用的所有术语(包括技术术语和科学术语)具有与本公开所属领域的普通技术人员通常理解的相同的含义。
31.图1示出了包括可移动起重臂3和可移动配重12的起重机1的示例的透视图。图2示出了图1所示的起重机1的侧视图。起重机1包括细长立柱2和可移动地连接至立柱2的细长的起重臂3。这些图仅示出了立柱的上部部分。起重臂3具有在立柱2的一侧上延伸的前部部分6和在立柱2的相对侧上延伸的后部部分8。起重臂3布置成其纵向轴线垂直于立柱的纵向轴线。当使用起重机时,立柱2竖直布置,且起重臂3水平布置。起重臂3布置成可相对于立柱2线性可移动。因此,前部部分6的长度和后部部分8的长度通过相对于立柱2移动起重臂3是可调节的。如图2所示,起重臂3的总长度l被限定为前部部分6的外端部7与后部部分8的外端部9之间的长度。
32.起重机1进一步包括用于提升部件的吊装装置10。吊装装置10连接到起重臂的前部部分6。在一方面,提升装置10布置在前部部分的外端部7处。在该示例中,吊装装置10包括用于保持待提升部件的诸如吊钩的提升装置11和连接到提升装置11的缆线,该缆线用于相对于起重臂3移动提升装置。起重机包括用于致动提升装置11的移动的驱动单元14。缆线连接在提升装置11与驱动单元14之间。
33.如图2所示,立柱2包括下固定部分21和上旋转部分22,该上旋转部分22布置成相对于固定部分21可围绕旋转轴线r旋转。起重臂3可移动的连接至旋转部分22。因此,起重臂3相对于旋转部分22是线性可移动的并且相对于立柱2的固定部分21是可旋转的。优选地,配重12布置成可移动到前部部分6上的位于距旋转轴线r至少1m的位置。配重12的位置被限定为配重的重心位置。更优选地,配重12布置成可移动距该旋转轴线r至少2m的距离、并且最优选地可移动距该旋转轴线r至少3m的距离。
34.在一方面,如图2所示,起重臂3和立柱2布置成使得起重臂3相对于立柱2的线性移动被约束于起重臂的一部分24。起重臂3相对于立柱2的移动可被约束为小于起重臂的长度l的50%。在该示例中,起重臂3相对于立柱2的移动被约束为起重臂的长度l的约20%。
35.部分24的一个端部由第一位置p1限定,而且另一端部由第二位置p2限定,第二位置p2对应于旋转轴线r沿起重臂的极端位置。在本技术中,第一位置p1和第二位置p2限定为当起重臂3在其极限位置时,水平平面与旋转部分22的旋转轴线r之间的交叉点。起重臂相对于立柱的移动长度被约束为第一位置p1和第二位置p2之间的距离d2,即,为旋转轴线r的
两个极限位置之间的距离。距离d2对应于部分24的长度。
36.起重臂的移动可以不同方式约束。例如,起重臂可以设置有用于引导起重臂的移动的一个或两个引导构件,并且引导构件的长度对应于部分24的长度。例如,该引导构件可以是轨道、导轨或齿条。起重臂3可以制成为单件,或者制成为在起重机的使用期间彼此附接的两个或更多个件。如果起重臂很长,则将起重臂分开成在起重臂的使用期间被放在一起的两件或更多件会是有利的。因此,有助于起重臂的运输。
37.起重机1进一步包括可移动地连接至起重臂3的配重12。起重臂3和配重12布置成使得它们可以相互独立地移动。配重12和起重臂3进一步布置成使得配重12可经过立柱2,并且相应地独立于起重臂3相对于立柱2的位置而在前部部分6与后部部分8之间移动。因此,配重12可移动到立柱2两侧的操作位置。因此,可移动配重12可放置在立柱的每一侧上,以在包括提升载荷的起重臂的前部部分6的重量和起重臂的后部部分8的重量之间产生平衡。配重12布置成可在位于起重臂前部部分6上的第三位置p3和位于起重臂后部部分8上的第四位置p4之间移动。在本技术中,第三位置p3和第四位置p4被限定为当配重处于其极限位置时配重的重心位置。
38.可移动配重12可以沿起重臂3移动,并且定位在第三位置p3与第四位置p4之间的任意点。第三位置p3与第一位置p1间隔开,并且第四位置p3与第二位置p2间隔开。第三位置p3比第一位置p1更靠近起重臂的前部部分6的外端部7,第四位置p3比第二位置p2更靠近起重臂的后部部分8的外端部9。因此,配重12可以在立柱2的相对侧之间移动。
39.配重12布置成可沿起重臂3的长度l的至少50%移动。优选地,配重12布置成可沿起重臂的长度l的至少70%移动。最优选地,配重布置成可沿起重臂的长度l的至少80%移动。因此,提高了使用配重来平衡起重机的可能性。配重12布置成可沿起重臂移动的距离被限定为配重在两个极限位置的重心之间的距离。起重臂的长度l是指后部部分的外端部7与前部部分的外端部9之间的距离。因此,提高了使用配重来平衡起重机的可能性。在该示例中,第三位置p3紧邻起重臂的前部部分6的外端部7,第四位置p4紧邻后部部分8的外端部9。因此,配重12沿起重臂3的大部分长度是可移动的。
40.起重臂3包括框架16,该框架16包括多个梁。在一方面,框架16包括沿起重臂的上部部分平行延伸的两个上部梁18。在一方面,框架16包括沿起重臂的下部部分平行地延伸的两个下部梁20。框架进一步包括布置在梁18和梁20之间以形成格子的多个梁。
41.框架16布置成使得在框架16内形成细长内部空间26。在该示例中,内部空间26沿起重臂3的整个长度延伸。在一方面,配重12布置成可在内部空间26内移动。因此,配重由框架16保护,并且将包括配重的起重臂运输到现场变得更容易,并且有助于起重臂到立柱的安装。可替代地,配重12可以布置成可在框架的顶部上或者在框架的一侧上移动。
42.在该示例中,框架16内的内部空间26具有矩形横截面。在一方面,配重为矩形。因此,配重12是紧凑的并且具有限定的重心。进一步地,矩形配重很好地适配在矩形内部空间26内。配重12可移动地连接至两个上部梁18并且布置成可沿两个上部梁18移动。
43.如图2所示,配重14布置成可相对于起重臂3线性移动第一距离d1。起重臂3布置成可相对于立柱2线性移动第二距离d2。第一距离d1是第三位置p3与第四位置p4之间的距离。第二距离d2是第一位置p1与第二位置p2之间的距离。第一距离d1长于第二距离d2。优选地,第一距离d1比第二距离d2长至少30%。更优选地,第一距离比第二距离长至少50%,以及最
优选地,第一距离d1是第二距离d2的至少两倍。因此,配重相对于起重臂比起重臂相对于立柱可移动更长的距离。前部部分的长度可以根据到待由起重机提升的部件的距离来调节,而配重用于平衡起重机。
44.起重机1包括用于使配重12沿起重臂3移动的第一传动系统以及用于使起重臂3相对于立柱移动的第二传动系统,并且第一传动系统和第二传动系统布置为独立地移动配重和起重臂3。
45.图2示出了起重机1,其中,起重臂3处于第一位置p1并且配重12处于第三位置p3。因此,配重12在立柱的前方,即在起重臂的前部部分6处。例如,当起重机卸载并且需要移动到建筑物或风力涡轮机的顶部以及需要从建筑物或风力涡轮机的顶部移动时,或者当起重机在距起重机短距离处提升轻型部件时,这是合适的。
46.图3示出了起重机1,其中,起重臂3处于第二位置p2并且配重12仍然在起重臂的前部部分6处。例如,当起重机卸载并且需要移动到建筑物或风力涡轮机的顶部以及需要从建筑物或风力涡轮机的顶部移动时,或者起重机在距起重机长距离处提升轻型部件时,这是合适的。
47.图4示出了起重机1,其中,起重臂3处于第二位置p2并且配重12处于起重臂的后部部分6处的第四位置。当起重机在距起重机长距离处提升重型部件时,这是合适的。
48.图5示出了起重机1,其中,起重臂3处于第一位置p1并且配重12处于起重臂的后部部分6处的第四位置。当起重机在距起重机短距离处提升重型部件时,这是合适的。
49.图6以更大的比例示出了用于相对于起重臂3移动配重12的第一传动系统30的示例。第一传动系统30包括:细长的第一齿条34,其附接至起重臂3并在起重臂3的纵向方向上延伸;第一齿轮36,其附接至配重12并布置成与第一齿条34啮合;以及第一马达38,其用于驱动第一齿轮36,使得第一齿轮沿第一齿条34移动。优选地,第一马达38是电动马达。在该示例中,第一齿条34附接到起重臂的上部梁18中的一个。在一方面,第一传动系统30可包括两个齿条34,并且齿条34中的每一个附接至上部梁18中的一个。在这种情况下,第一传动系统30包括附接至配重12并布置成与第一齿条啮合的至少两个第一齿轮36以及用于驱动第一齿轮36的至少两个马达38。
50.在该示例中,上部梁18是h形梁。上部梁18具有沿梁的长度延伸的细长凹槽46。配重12设置有轮48,轮48布置成可沿凹槽46移动。第一马达38致动齿轮36的移动,使得齿轮36沿齿条34移动。第一马达38配置成沿齿条在两个相反方向上移动齿轮36。在该示例中,第一齿条34的长度和第一齿轮36的位置限定距离d1。
51.图7以更大的比例示出了用于相对于立柱2移动起重臂3的第二传动系统32的示例。第二传动系统32包括:细长的第二齿条40,其附接至起重臂3并在起重臂的纵向方向上延伸;以及第二齿轮42,其附接至立柱的旋转部分22并且布置成与第二齿条40啮合;以及第二马达44,其用于驱动第二齿轮42,使得第二齿轮沿第二齿条40移动。优选地,第二马达44是电动马达。在该示例中,第二齿条40附接到起重臂的下部梁20中的一个。在一方面,第二传动系统32可包括两个齿条40,并且齿条40中的每一个附接到起重臂的下部梁20中的一个。第二传动系统30可以包括附接至配重12并且布置成与第二齿条40啮合的两个或更多个第一齿轮42,以及用于驱动第二齿轮42的两个或更多个马达38。
52.在该示例中,旋转部分22包括板形本体50,该板形体50具有上表面52和在起重臂
的相对侧上从本体50突出的两个侧壁54。
53.起重臂的下部梁20在旋转部分22的上表面52上滑动。侧壁54在起重臂的线性移动期间引导起重臂。起重臂的下部梁20设置有滑轨60,该滑轨60面向侧壁54并沿部分24延伸。滑轨60在壁54的内表面上滑动。侧壁54设置有向内突出的止挡元件62。止动元件62将起重臂在旋转部分22的上表面54上保持在位。止挡元件62搁置在下部梁20上。因此,下部梁20在旋转部分22的上表面54、侧壁54和止挡元件62之间滑动。
54.第二马达44致动第二齿轮42的移动,使得第二齿轮42沿齿条34移动。因此,第一马达44致动起重臂3相对于立柱的旋转部分22的移动。第二马达44配置成使第二齿轮44沿第二齿条40在两个相反方向上移动。在该示例中,第二齿条44的长度和第二齿轮42的位置限定距离d2。立柱的固定部分21包括回转环(未示出)。旋转部分22包括环形元件56,该环形元件56设置有诸如螺栓或螺钉的紧固工具,以用于将旋转部分22附接至立柱的固定部分的回转环。
55.附图标记
56.1起重机
57.2立柱
58.3起重臂
59.6起重臂的前部部分
60.7前部部分的外端部
61.8起重臂的后部部分
62.9后部部分的外端部
63.10吊装装置
64.11提升装置
65.12配重
66.14用于提升布置的驱动单元
67.16框架
68.18上部梁
69.20下部梁
70.21立柱的固定部分
71.22立柱的旋转部分
72.24起重臂的可移动部分
73.26起重臂内部空间
74.30第一传动系统
75.32第二传动系统
76.34第一齿条
77.36第一齿轮
78.38第一马达
79.40第二齿条
80.42第二齿轮
81.44第二马达
82.p1、p2起重臂的极端位置
83.p3、p4配重的极端位置
84.46凹槽
85.48轮
86.50板形本体
87.52本体的上表面
88.54侧壁
89.56回转环
90.60滑轨
91.62止挡元件
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。