1.本发明涉及一种传送设备,尤其涉及一种建筑施工用钢材自动传送设备。
背景技术:
2.在建筑施工场地中,我们经常能够看见许多的建筑材料,而钢材是比较常见的建筑材料之一,由于钢材的质量较硬,因此重量也会比一般的建筑材料重,并且多数钢材的形状都为长条形和圆管形,而通过传统的人力方法来运输钢材则会耗费较多的时间和精力,一但需要运输的钢材增加,就会影响到整个施工团队的施工进展,因此需要使用到传送设备来辅助钢材的运输,现有技术的传送设备通常是使用叉车来运输钢材,这种方法比较繁琐。
3.根据专利授权公开号为cn208066954u,公告日为20181109的一种钢材传送装置,涉及轧钢设备,包括支架、设置在支架上的多个传送辊、驱动传送辊的驱动电机,所述支架上方设置有转动轮,所述支架上方设置有位于传送辊两侧的且与转动轮抵接的阻挡座,所述支架上固定设置有用于驱动两个阻挡座沿传送辊延伸方向移动的液压缸,所述阻挡座上设置有安装座,所述安装座上转动设置有沿竖直方向延伸且向传送辊方向突出于阻挡座的导向辊。该钢材传送装置通过驱动电机作为动力输出,使传送辊对钢材进行传送,两个导向辊则对钢材进行导向,这种方法虽然能够完成钢材的传送操作,但是只能够在平面上进行传送,无法跨越障碍物,因此具有局限性。
4.根据上述现有技术中所存在的缺点,特此设计出能够克服现有技术缺点的一种能够跨越障碍物或是对高低不同的位置进行钢材传送,使传送操作更加多样化的建筑施工用钢材自动传送设备。
技术实现要素:
5.本发明为了克服上述现有技术虽然能够完成钢材的传送操作,但是只能够在平面上进行传送,无法跨越障碍物,因此具有局限性的缺点,本发明要解决的技术问题是提供一种能够跨越障碍物或是对高低不同的位置进行钢材传送,使传送操作更加多样化的建筑施工用钢材自动传送设备。
6.为了解决上述技术问题,本发明提供了这样一种建筑施工用钢材自动传送设备,包括有电机、链轮、链条、传动轮、橡胶输送带、变形机构、支撑机构和锁止机构,传动轮设有两个,两个传动轮之间设置有用于动力输出的电机,电机输出轴和传动轮中部均套设有链轮,三个链轮之间绕设有用于传输动力的链条,两个传动轮之间绕设有用于传输钢材的橡胶输送带,电机上设置有用于适应地形的变形机构,变形机构上设置有用于稳定支撑的支撑机构和用于固定锁止的锁止机构。
7.优选地,变形机构包括有第一支腿、导轨架、导轨板、第一滑动杆、第二滑动杆和铰接板,电机前后两侧对称式设有第二滑动杆,电机输出轴转动式贯穿于前方的第二滑动杆,第二滑动杆远离电机的一端上侧连接有用于支撑的第一支腿,第一支腿和第二滑动杆之间
滑动式设有导轨架,导轨架下侧左右对称式设有导轨板,导轨板上滑动式设有与同侧传动轮转动式相连的第一滑动杆,第一滑动杆与同侧的第二滑动杆之间铰接式套设有铰接板。
8.优选地,支撑机构包括有第二支腿、第一复位弹簧、连接盘、第一棘齿轮、套管和第二棘齿轮,第一滑动杆上套设有套管和第二棘齿轮,第二棘齿轮位于套管靠近铰接板的一侧,对称的两块导轨板相离的一端上均铰接式贯穿有用于支撑的第二支腿,第二支腿上套设有用于堆动套管的连接盘和与第二棘齿轮啮合的第一棘齿轮,第一棘齿轮与第二棘齿轮的材质均为橡胶材质,连接盘与导轨板之间连接有绕设在第二支腿外侧的第一复位弹簧。
9.优选地,锁止机构包括有安装杆、固定板、第二复位弹簧、连接板、第三棘齿轮、卡块和连接弹簧,对称的两块导轨板相离的一端上侧均滑动式设有安装杆,安装杆中部下侧连接有围绕于第一滑动杆的固定板,铰接板远离传动轮的一侧上连接有围绕于第一滑动杆的第三棘齿轮,第三棘齿轮与固定板之间连接有绕设在第一滑动杆外侧的第二复位弹簧,第三棘齿轮上连接有与第二棘齿轮相连的连接板,安装杆靠近传动轮的一端下侧滑动式套设有用于卡住第三棘齿轮的卡块,卡块与安装杆之间连接有连接弹簧。
10.优选地,还包括有用于增加运输量的扩展机构,扩展机构包括有橡胶扩展板、橡胶限位板、橡胶板、双向螺杆和螺母,两个导轨架中部相向的一侧上均连接有橡胶扩展板,橡胶扩展板上滑动式套设有用于钢材限位的橡胶限位板,橡胶限位板向下移动时能够与第二滑动杆接触,后方导轨板下侧转动式设有双向螺杆,双向螺杆上前后对称式套设有与其螺纹式配合的螺母,螺母与同侧的橡胶限位板之间连接有橡胶板。
11.优选地,还包括有用于卡住支撑机构的固定机构,固定机构包括有导向块、导杆、第三复位弹簧、安装块、弹性球和磁板,导轨架下部连接有用于导向的导向块,导向块上滑动式贯穿有导杆,导杆与导向块之间连接有第三复位弹簧,导杆上侧连接有安装块,安装块左右两侧连接有用于卡住第二支腿的弹性球,第一支腿上部连接有与同侧安装块磁性配合的磁板。
12.优选地,还包括有用于润滑橡胶输送带的润滑机构,润滑机构包括有固定块、固定环和润滑棉,两个导轨架下部相向的一侧上对称式设有固定块,两块固定块相向的一端上均连接有固定环,两个固定环之间套设有用于润滑橡胶输送带的润滑棉。
13.优选地,连接盘的形状为环形。
14.本发明在克服现有技术缺点的基础上,还能够达到的有益效果有:1、通过导轨架和导轨板的移动能够使橡胶输送带形变,以此能够跨越障碍物或是对高低不同的位置进行钢材传送,增加了优越性,通过第二支腿的支撑是,增加了钢材传送时的稳定性。
15.2、在进行钢材传送的过程中,将橡胶限位板展开,通过橡胶扩展板的支撑能够增加钢材传送的面积,以此提高传送的效率,将橡胶限位板收起,以此能够对钢材进行限位。
16.3、通过橡胶球将第二支腿卡住,以此在无需使用第二支腿时,避免了第二支腿被意外移动的现象发生,增加了安全性。
17.4、通过润滑棉对橡胶输送带进行润滑操作,以此能够使钢材的卸料操作更加轻松,节省了操作人的时间,同时也能够通过润滑棉将橡胶输送带上的铁屑清理掉,避免了铁屑对操作人造成伤害。
附图说明
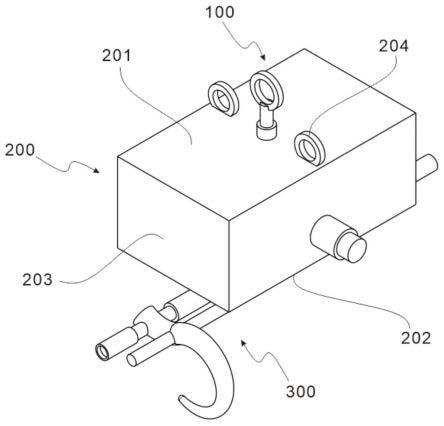
18.图1为本发明的第一种立体结构示意图。
19.图2为本发明的第二种立体结构示意图。
20.图3为本发明润滑机构的立体结构示意图。
21.图4为本发明扩展机构的立体结构示意图。
22.图5为本发明变形机构的立体结构示意图。
23.图6为本发明变形机构的部分立体结构示意图。
24.图7为本发明变形机构的部分立体结构剖视图。
25.图8为本发明的a处放大图。
26.图9为本发明支撑机构和锁止机构的第一种部分立体结构示意图。
27.图10为本发明支撑机构和锁止机构的第二种部分立体结构示意图。
28.附图中的标记为:1-电机,2-链轮,21-链条,3-传动轮,31-橡胶输送带,4-变形机构,41-第一支腿,42-导轨架,43-导轨板,44-第一滑动杆,45-第二滑动杆,46-铰接板,5-支撑机构,51-第二支腿,52-第一复位弹簧,53-连接盘,54-第一棘齿轮,55-套管,56-第二棘齿轮,6-锁止机构,61-安装杆,62-固定板,63-第二复位弹簧,64-连接板,65-第三棘齿轮,66-卡块,67-连接弹簧,7-扩展机构,71-橡胶扩展板,72-橡胶限位板,73-橡胶板,74-双向螺杆,75-螺母,8-固定机构,81-导向块,82-导杆,83-第三复位弹簧,84-安装块,85-弹性球,86-磁板,9-润滑机构,91-固定块,92-固定环,93-润滑棉。
具体实施方式
29.下面结合附图和实施例对本发明作进一步的说明。
30.实施例1一种建筑施工用钢材自动传送设备,如图1、图2、图5、图6、图9和图10所示,包括有电机1、链轮2、链条21、传动轮3、橡胶输送带31、变形机构4、支撑机构5和锁止机构6,传动轮3设有两个,两个传动轮3之间设置有电机1,电机1输出轴和传动轮3中部均套设有链轮2,三个链轮2之间绕设有链条21,两个传动轮3之间绕设有橡胶输送带31,电机1上设置有变形机构4,变形机构4上设置有支撑机构5和锁止机构6。
31.如图6所示,变形机构4包括有第一支腿41、导轨架42、导轨板43、第一滑动杆44、第二滑动杆45和铰接板46,电机1前后两侧对称式设有第二滑动杆45,电机1输出轴转动式贯穿于前方的第二滑动杆45,第二滑动杆45远离电机1的一端上侧焊接有第一支腿41,第一支腿41和第二滑动杆45之间滑动式设有导轨架42,导轨架42下侧左右对称式栓接有导轨板43,导轨板43上滑动式设有第一滑动杆44,第一滑动杆44与同侧的传动轮3转动式相连,第一滑动杆44与同侧的第二滑动杆45之间铰接式套设有铰接板46。
32.如图9和图10所示,支撑机构5包括有第二支腿51、第一复位弹簧52、连接盘53、第一棘齿轮54、套管55和第二棘齿轮56,第一滑动杆44上套设有套管55和第二棘齿轮56,第二棘齿轮56位于套管55靠近铰接板46的一侧,对称的两块导轨板43相离的一端上均铰接式贯穿有第二支腿51,第二支腿51上套设有连接盘53和第一棘齿轮54,第一棘齿轮54与第二棘齿轮56啮合,连接盘53的形状为环形,第一棘齿轮54与第二棘齿轮56的材质均为橡胶材质,连接盘53与导轨板43之间连接有第一复位弹簧52,绕设在第二支腿51外侧绕设在第二支腿
51外侧。
33.如图9所示,锁止机构6包括有安装杆61、固定板62、第二复位弹簧63、连接板64、第三棘齿轮65、卡块66和连接弹簧67,对称的两块导轨板43相离的一端上侧均滑动式设有安装杆61,安装杆61中部下侧焊接有固定板62,固定板62围绕于第一滑动杆44,铰接板46远离传动轮3的一侧上连接有第三棘齿轮65,第三棘齿轮65围绕于第一滑动杆44,第三棘齿轮65与固定板62之间连接有第二复位弹簧63,第二复位弹簧63绕设在第一滑动杆44外侧,第三棘齿轮65上连接有连接板64,连接板64与第二棘齿轮56相连,安装杆61靠近传动轮3的一端下侧滑动式套设有卡块66,卡块66与安装杆61之间连接有连接弹簧67。
34.首先,当需要对钢材进行运输时,操作人启动电机1,电机1输出轴带动中间的链轮2顺时针旋转,中间的链轮2通过链条21带动左右两侧的链轮2顺时针旋转,左右两侧的链轮2分别通过左右两侧的传动轮3带动橡胶输送带31顺时针旋转,操作人再将钢材放置在橡胶输送带31上,橡胶输送带31随之将钢材从左方传送至右方,以此能够对钢材进行传送,操作人随后关闭电机1,当需要跨越障碍物或是对高低不同的位置进行钢材传送时,操作人通过导轨架42带动导轨板43向下移动,左右两侧的第一滑动杆44随之通过固定板62分别带动左右两侧的安装杆61以相向的方向移动,导轨板43通过第一滑动杆44带动铰接板46以第二滑动杆45为圆心向下摆动,与此同时,第一滑动杆44还会带动传动轮3向下移动,传动轮3带动与其连接的链轮2和橡胶输送带31向下移动,中间的链轮2,左右两侧的链轮2会拉动链条21形变,电机1挤压橡胶输送带31,橡胶输送带31发生形变,此时的橡胶输送带31呈现为三角形的输送路程,以此能够实现跨越障碍物或是对高低不同的位置进行钢材传送的效果,在铰接板46以第二滑动杆45为圆心向下摆动时,铰接板46还会带动第三棘齿轮65以第二滑动杆45为圆心旋转,第二复位弹簧63形变,第三棘齿轮65旋转会挤压卡块66,卡块66受力向上移动,连接弹簧67压缩,第三棘齿轮65继续旋转会松开卡块66,连接弹簧67复位,卡块66在连接弹簧67复位的作用下向下移动将第三棘齿轮65卡住,第三棘齿轮65在旋转时会通过连接板64带动第二棘齿轮56旋转挤压第一棘齿轮54,由于第一棘齿轮54与第二棘齿轮56的材质均为橡胶材质,因此第一棘齿轮54和第二棘齿轮56会发生形变,随后在卡块66卡住第三棘齿轮65时,第一棘齿轮54和第二棘齿轮56会再次复位啮合,以此能够使橡胶输送带31更加稳定地对钢材进行传输,当需要在两栋楼之间或是河道上方进行钢材传送时,操作人首先通过连接盘53带动第二支腿51以远离导轨板43的方向移动,第一复位弹簧52压缩,第二支腿51会带动第一棘齿轮54移动脱离第二棘齿轮56,连接盘53继续移动会推动套管55带动第二棘齿轮56移动,第二棘齿轮56通过连接板64带动第三棘齿轮65移动脱离卡块66,第二复位弹簧63压缩,第三棘齿轮65移动还会带动铰接板46以远离传动轮3的方向移动,由于此时的第三棘齿轮65已经脱离卡块66,因此铰接板46会在橡胶输送带31的重力作用下以第二滑动杆45为圆心向上摆动并再次与水平面平行,铰接板46还会通过第一滑动杆44带动传动轮3向上移动,以此能够使橡胶输送带31复位,与此同时,左右两侧的第一滑动杆44还会以相离的方向移动并分别通过左右两侧的导轨板43带动导轨架42向上移动复位,以此能够完成橡胶输送带31复位的操作,随后操作人再带动第二支腿51旋转180
°
展开,通过第二支腿51能够进行长距离的支撑,操作人再松开连接盘53,第一复位弹簧52复位,连接盘53在第一复位弹簧52复位的作用下复位并松开套管55,第二复位弹簧63复位,第三棘齿轮65在第二复位弹簧63复位的作用下反向移动并重新与卡块66接触,通过卡块66再次将第三棘齿轮65
卡住,第三棘齿轮65移动还会通过连接板64带动第二棘齿轮56移动复位,第二棘齿轮56会带动套管55移动复位,与此同时,连接盘53还会在第一复位弹簧52复位的作用下带动第二支腿51以靠近导轨板43的方向移动,第二支腿51会带动第一棘齿轮54反向移动重新与第二棘齿轮56啮合,以此能够通过第二棘齿轮56将第一棘齿轮54卡住,进而使第二支腿51的支撑效果更加稳定,当需要使第二支腿51复位时,操作人再次以相同的方向带动第二支腿51旋转180
°
,第二棘齿轮56随之会挤压第一棘齿轮54形变,以此能够使第二支腿51复位,随后第二棘齿轮56和第一棘齿轮54再次复位啮合,以此能够完成钢材传送的操作。
35.实施例2在实施例1的基础之上,如图1和图4所示,还包括有扩展机构7,扩展机构7包括有橡胶扩展板71、橡胶限位板72、橡胶板73、双向螺杆74和螺母75,两个导轨架42中部相向的一侧上均栓接有橡胶扩展板71,橡胶扩展板71上滑动式套设有橡胶限位板72,橡胶限位板72向下移动时能够与第二滑动杆45接触,后方导轨板43下侧转动式设有双向螺杆74,双向螺杆74上前后对称式套设有与其螺纹式配合的螺母75,螺母75与同侧的橡胶限位板72之间连接有橡胶板73。
36.在传送钢材时,操作人顺时针旋转双向螺杆74,双向螺杆74通过前后两侧的螺母75分别带动前后两侧的橡胶板73以相离的方向移动,前后两侧的橡胶板73分别带动前后两侧的橡胶限位板72以相离的方向移动展开,随后再通过橡胶扩展板71的支撑,便能够增大钢材传送的面积,以此进行扩展操作,当需要跨越障碍物或是对高低不同的位置进行钢材传送时,导轨架42和导轨板43向下移动会分别带动橡胶扩展板71和双向螺杆74向下移动,双向螺杆74通过螺母75带动橡胶板73向下移动,橡胶板73带动橡胶限位板72向下移动与第二滑动杆45接触,第二滑动杆45会挤压橡胶限位板72和橡胶扩展板71形变,橡胶板73随之拉伸,以此使扩展操作能够对钢材传送方法的改变进行适应,随后在橡胶输送带31复位时,导轨架42和导轨板43向上移动会分别带动橡胶扩展板71和双向螺杆74向上移动,双向螺杆74通过螺母75带动橡胶板73向上移动,橡胶板73带动橡胶限位板72向上移动脱离第二滑动杆45,以此使橡胶限位板72和橡胶扩展板71复位,随后操作人逆时针旋转双向螺杆74,双向螺杆74通过前后两侧的螺母75分别带动前后两侧的橡胶板73以相向的方向移动,前后两侧的橡胶板73分别带动前后两侧的橡胶限位板72以相向的方向移动,以此能够使橡胶限位板72收起。
37.实施例3在实施例2的基础之上,如图1、图7和图8所示,还包括有固定机构8,固定机构8包括有导向块81、导杆82、第三复位弹簧83、安装块84、弹性球85和磁板86,导轨架42下部焊接有导向块81,导向块81上滑动式贯穿有导杆82,导杆82与导向块81之间连接有第三复位弹簧83,导杆82上侧连接有安装块84,安装块84左右两侧连接有弹性球85,第一支腿41上部栓接有磁板86,磁板86与同侧的安装块84磁性配合。
38.起初的磁板86正磁性吸附住安装块84,弹性球85正卡住第二支腿51,通过弹性球85能够避免第二支腿51被意外移动,导轨架42和导轨板43向下移动会分别带动导向块81和第二支腿51向下移动,导向块81向下移动会挤压第三复位弹簧83,第三复位弹簧83压缩,第二支腿51向下移动会挤压弹性球85形变,第二支腿51随之脱离弹性球85,弹性球85复位,此时操作人能够带动第二支腿51向下旋转90
°
,以此能够通过第二支腿51支撑住地面,当第三
复位弹簧83压缩至极限时,导向块81继续向下移动会通过第三复位弹簧83拉动导杆82向下移动,导杆82带动安装块84向下移动脱离磁板86,第三复位弹簧83复位,导杆82在第三复位弹簧83复位的作用下带动安装块84向下移动,以此能够在无需使用第二支腿51时,通过安装块84上的弹性球85能够再次将第二支腿51固定住,随后导轨架42和导轨板43向上移动会分别带动导向块81和第二支腿51向上移动,导向块81会通过第三复位弹簧83拉动导杆82向上移动,导杆82会带动安装块84向上移动与磁板86接触,磁板86再次将安装块84磁性吸附住,以此能够使安装块84复位。
39.实施例4在实施例3的基础之上,如图1和图3所示,还包括有润滑机构9,润滑机构9包括有固定块91、固定环92和润滑棉93,两个导轨架42下部相向的一侧上对称式焊接有固定块91,两块固定块91相向的一端上均焊接有固定环92,两个固定环92之间套设有润滑棉93。
40.在橡胶输送带31传送钢材的过程中,操作人将润滑液加入至润滑棉93内,橡胶输送带31旋转会与润滑棉93接触,以此能够使钢材的卸料操作更加轻松,同时也能够通过润滑棉93将橡胶输送带31上的铁屑清理掉。
41.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。