1.本发明涉及机器人用搬运夹具技术领域,特别是涉及压铸件抛丸线使用多品种产品对应新型机器人搬送夹具。
背景技术:
2.压铸成型的铝合金制变速箱壳体在后处理(抛丸)环节,通过机器人上下料解决人工上下料所引起恶劣工况对操作人员的伤害以及提升设备生产能力节省成本;如授权公告号为cn108748223a的发明所公开的机器人用的搬送夹具,其虽然结构简单、具有良好的定位夹具,定位销的倒角在弹簧收缩的时候可以有效的进入空隙,做到定位的效果,提高了工作效率,降低了生产成本,但是并未解决现有的变速箱搬送手,仅能对应一种工件,通用性不够;另外对于夹紧面容易出现伤痕、更换麻烦,切换品种时更换机械手作业时间长,效率低下,生产成本居高不下,为此我们提出压铸件抛丸线使用多品种产品对应新型机器人搬送夹具。
技术实现要素:
3.为了克服现有技术的不足,本发明提供压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,可以同时满足两种工件的搬送要求,并且有良好的通用性,而且夹紧面无伤痕,设备的维护保养简单,大大降低前提投入成本和后期的维护保养成本。而且能够对应恶劣工况,并且通过双机械手提升生产节拍,提高生产效率。
4.为解决上述技术问题,本发明提供如下技术方案:压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,包括支撑柱,所述支撑柱一侧表面设置有三爪气缸,所述三爪气缸电连接有第三爪齿,所述三爪气缸一侧设置有平型气缸,所述平型气缸底端设置有第一爪臂与第二爪臂,所述第一爪臂一侧表面设置有第一爪齿,所述第二爪臂一侧表面设置有第二爪齿。
5.作为本发明的一种优选技术方案,所述支撑柱一侧表面设置有品种在位确认接近开关与位检测杆,所述品种在位确认接近开关与位检测杆的中间设置有弹簧。
6.作为本发明的一种优选技术方案,所述支撑柱的数量设置有三个,且所述平型气缸与三爪气缸的数量均设置有两个。
7.作为本发明的一种优选技术方案,所述三爪气缸、第三爪齿与支撑柱组合为夹具组合,所述夹具组合的数量设置有两个,且两个夹具组合连接处设置有连接座。
8.作为本发明的一种优选技术方案,所述第一爪臂、第二爪臂与装置主体的连接处设置有快换把手,且所述第一爪臂与第二爪臂外侧均设置有防锈漆。
9.作为本发明的一种优选技术方案,所述第一爪齿、第二爪齿与第三爪齿均采用特殊耐高温且耐磨损的塑料材质制作。
10.作为本发明的一种优选技术方案,所述弹簧外侧设置有防锈漆,且所述弹簧围绕位检测杆一侧表面呈环状分布。
11.与现有技术相比,本发明能达到的有益效果是:通过设置的本装置,可以同时满足两种工件的搬送要求,并且有良好的通用性,而且夹紧面无伤痕,设备的维护保养简单,大大降低前提投入成本和后期的维护保养成本。而且能够对应恶劣工况,并且通过双机械手提升生产节拍,提高生产效率。
附图说明
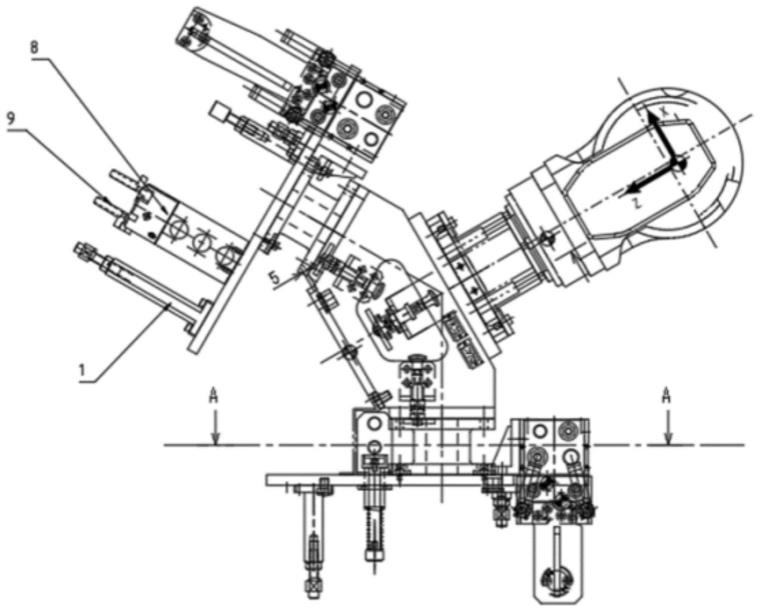
12.图1为本发明一种实施例的侧面结构示意图;图2为本发明一种实施例的仰视结构示意图;图3为本发明一种实施例的实际应用结构示意图;图4为本发明一种实施例的产品在位确认结构示意图;其中:1、支撑柱;2、位检测杆;3、弹簧;4、品种在位确认接近开关;5、平型气缸;6、第一爪齿;7、第二爪齿;8、三爪气缸;9、第三爪齿;12、第一爪臂;13、第二爪臂。
具体实施方式
13.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本发明,但下述实施例仅仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本发明的保护范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。
14.实施例1:如图1-图4所示,压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,包括支撑柱1,其特征在于,支撑柱1一侧表面设置有三爪气缸8,三爪气缸8电连接有第三爪齿9,三爪气缸8一侧设置有平型气缸5,平型气缸5底端设置有第一爪臂12与第二爪臂13,第一爪臂12一侧表面设置有第一爪齿6,第二爪臂13一侧表面设置有第二爪齿7;支撑柱1一侧表面设置有品种在位确认接近开关4与位检测杆2,品种在位确认接近开关4与位检测杆2的中间设置有弹簧3;产品进行抓取动作时,支撑柱1先接触产品保证产品平整前提下,位检测杆2通过弹簧3上升触发品种在位确认接近开关4,产品在位确认后平型气缸5向内侧移动第一爪齿6与第二爪齿7插入产品的抓取孔,而第一爪齿6与第二爪齿7采用仿形设计对产品抓取并进行定位,随后三爪气缸8张开,带动第三爪齿9抓取产品避免产品位移,完成抓取工作;可以同时满足两种工件的搬送要求,并且有良好的通用性,而且夹紧面无伤痕,设备的维护保养简单,大大降低前提投入成本和后期的维护保养成本。而且能够对应恶劣工况,并且通过双机械手提升生产节拍,提高生产效率。
15.在其他实施例中,本实施例公开了,请如图1-图2所示,支撑柱1的数量设置有三个,且平型气缸5与三爪气缸8的数量均设置有两个;通过该设计,可以提升本装置对产品的抓紧精度,让产品的抓取能更加平稳,提升使用效果。
16.在其他实施例中,本实施例公开了,请如图1-图2所示,三爪气缸8、第三爪齿9与支撑柱1组合为夹具组合,夹具组合的数量设置有两个,且两个夹具组合连接处设置有连接座;通过该设计,在每个工位上取出完成品,再放置未加工产品来减少机器人的移动,从而
提升整体生产节拍,让完成的效率提高。
17.实施例2:在其他实施例中,本实施例公开了,请如图1-图2所示,第一爪臂12、第二爪臂13与装置主体的连接处设置有快换把手,且第一爪臂12与第二爪臂13外侧均设置有防锈漆;通过该设计,让工作时每次切换品种时,只需拆卸快换把手把第一爪臂12、第二爪臂13带下即可,可以更快进行品种的更换,极大提升作业效率。
18.在其他实施例中,本实施例公开了,请如图1-图2所示,第一爪齿6、第二爪齿7与第三爪齿9均采用特殊耐高温且耐磨损的塑料材质制作;通过该设计,在保证强度的情况下可以有效防止夹痕的出现,有利于保持产品外观良好。
19.在其他实施例中,本实施例公开了,请如图1-图2所示,弹簧3外侧设置有防锈漆,且弹簧3围绕位检测杆2一侧表面呈环状分布;通过该设计,可以增强弹簧3与位检测杆2之间的机动性。
20.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
技术特征:
1.压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,包括支撑柱(1),其特征在于,所述支撑柱(1)一侧表面设置有三爪气缸(8),所述三爪气缸(8)电连接有第三爪齿(9),所述三爪气缸(8)一侧设置有平型气缸(5),所述平型气缸(5)底端设置有第一爪臂(12)与第二爪臂(13),所述第一爪臂(12)一侧表面设置有第一爪齿(6),所述第二爪臂(13)一侧表面设置有第二爪齿(7)。2.根据权利要求1所述的压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,其特征在于:所述支撑柱(1)一侧表面设置有品种在位确认接近开关(4)与位检测杆(2),所述品种在位确认接近开关(4)与位检测杆(2)的中间设置有弹簧(3)。3.根据权利要求1所述的压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,其特征在于:所述支撑柱(1)的数量设置有三个,且所述平型气缸(5)与三爪气缸(8)的数量均设置有两个。4.根据权利要求1所述的压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,其特征在于:所述三爪气缸(8)、第三爪齿(9)与支撑柱(1)组合为夹具组合,所述夹具组合的数量设置有两个,且两个夹具组合连接处设置有连接座。5.根据权利要求1所述的压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,其特征在于:所述第一爪臂(12)、第二爪臂(13)与装置主体的连接处设置有快换把手,且所述第一爪臂(12)与第二爪臂(13)外侧均设置有防锈漆。6.根据权利要求1所述的压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,其特征在于:所述第一爪齿(6)、第二爪齿(7)与第三爪齿(9)均采用特殊耐高温且耐磨损的塑料材质制作。7.根据权利要求2所述的压铸件抛丸线使用多品种产品对应新型机器人搬送夹具,其特征在于:所述弹簧(3)外侧设置有防锈漆,且所述弹簧(3)围绕位检测杆(2)一侧表面呈环状分布。
技术总结
本发明涉及机器人用搬运夹具技术领域,特别是涉及压铸件抛丸线使用多品种产品对应新型机器人搬送夹具。其包括支撑柱,所述支撑柱一侧表面设置有三爪气缸,所述三爪气缸电连接有第三爪齿,所述三爪气缸一侧设置有平型气缸,所述平型气缸底端设置有第一爪臂与第二爪臂,所述第一爪臂一侧表面设置有第一爪齿,所述第二爪臂一侧表面设置有第二爪齿;通过设置的本装置,可以同时满足两种工件的搬送要求,并且有良好的通用性,而且夹紧面无伤痕,设备的维护保养简单,大大降低前提投入成本和后期的维护保养成本。而且能够对应恶劣工况,并且通过双机械手提升生产节拍,提高生产效率。提高生产效率。
技术研发人员:张杨
受保护的技术使用者:丰汉电子(上海)有限公司
技术研发日:2022.03.08
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。