1.本实用新型涉及运载工具、客运货运或运动休闲领域,包含自行车在日常生活中的应用。
背景技术:
2.在日常人们的生活中,骑行自行车即可以方便远行,又可运动休闲锻炼身体,但除了电动自行车之外,自行车都是通过人力的驱动,提供自行车前行的动力的,长时间的通过人力驱动自行车,会让人非常劳累。
技术实现要素:
3.基于此,有必要提供一种更利于人们出行的自行车伞,通过自行车自带的动力装置驱动自行车的前行。
4.自力自行车,包括车架、车轮、车横梁、中轴座、轴端盖、链条等能够操作、转动的基本构件外,还包括可以自身产生动力的自力驱动机构。自力驱动机构包括脚踏板一、脚踏板轴一、曲柄一、脚踏板二、脚踏板轴二、曲柄二、中轴、中轴套、轴端盖、支撑轮、行星轮一、行星轮二、行星轮三、行星轮四、行程轮、链盘、换向轮、棘爪盘、棘爪、弹簧片、连杆、动力体一、动力体二、固定座一、固定座二、拉钩一、拉钩二、拉钩三、拉钩四、拉杆、支撑杆、弹性件、压轮、传动轴一、传动轴二、销一、销二、键、曲柄三、后轴、钢圈、链轮、u型轴承等构件。根据动力体一、动力体二的一端连接是否是固定构件还是活动构件,可以分为半自力驱动机构与全自力驱动机构。半自力驱动机构根据驱动的对象不同,可以分为驱动链盘的半自力驱动机构和驱动车轮的半自力驱动机构。棘爪盘、棘爪、弹簧片、换向盘上的棘轮构成棘轮组件。行星轮三、行星轮四与换向轮组成换向加速组件。
5.所述半自力驱动机构或全自力驱动机构提供的动力,驱动自行车车轮的转动前行。
6.在其中一个实施例中,所述脚踏板一铰接在所述曲柄一一端,所述曲柄一另一端固定连接所述中轴一端;所述中轴套安装在自行车车架上的所述中轴座中,两端有一对所述轴端盖固定在所述中轴座上;所述中轴穿过所述中轴套,在所述中轴套内旋转并被所述轴端盖轴向限位;所述中轴另一端固定连接所述曲柄二的一端,所述曲柄二另一端铰接所述脚踏板二。在全自力驱动机构中,所述曲柄三一端与曲柄二一端固定连接,相差180度同时随所述中轴旋转。
7.在其中一个实施例中,所述棘轮盘键连接在所述中轴上,随所述中轴转动而转动。所述棘轮爪铰接在所述棘轮盘上;在棘轮盘随所述中轴顺时针旋转时,所述弹簧片撑起所述棘轮爪,所述棘轮爪带动换向轮上的棘轮同时旋转;在棘轮盘随所述中轴逆时针旋转时所述棘轮爪,被所述换向轮上的棘轮按下,压缩所述弹簧片,所述棘爪带不到所述换向轮上的棘轮旋转。所述棘轮盘、所述棘爪、所述弹簧片、所述换向轮上的棘轮,构成所述棘轮组件。
8.在其中一个实施例中,所述支撑轮套设在所述中轴上,绕中轴旋转,支撑所述行星轮一、所述行星轮二;所述行星轮一;所述行星轮一、所述行星轮二与所述支撑轮啮合,并绕所述支撑轮旋转。
9.在其中一个实施例中,所述连杆套设在所述中轴上,绕所述中轴旋转,两端铰接有传动轴一、传动轴二,所述传动轴一、传动轴二分别键连接所述行星轮一、所述行星轮二。
10.在其中一个实施例中,所述行程轮套设在所述行星轮一、所述行星轮二上;所述行程轮设有内齿,与所述行星轮一、行星轮二啮合;所述支撑轮也支撑所述行程轮。
11.在其中一个实施例中,所述行程轮上固定有链盘,所述链盘与所述行程轮连成一体,随行程轮而动,所述链盘与所述链条啮合。
12.在其中一个实施例中,所述传动轴一、传动轴二上还键连接有所述行星轮三、行星轮四,所述行星轮一与行星轮三与所述传动轴一同轴旋转,所述行星轮二与行星轮四与所述传动轴二同轴旋转。
13.在其中一个实施例中,所述换向轮居中套设在中轴上,设有棘轮、内齿等特征;也套设在所述行星轮三、所述行星轮四上,与所述行星轮三、行星轮四啮合。
14.在其中一个实施例中,所述拉钩一一端钩住所述传动轴一上,另一端固定连接所述动力体一;所述动力体一另一端与所述拉钩二一端固定连接,所述拉钩二另一端铰接在销一上;所述销一铰接在固定座一上,所述固定座一固定在车架上。
15.在其中一个实施例中,所述拉钩三一端钩住所述传动轴二上,另一端固定连接所述动力体二;所述动力体二另一端与所述拉钩四一端固定连接,所述拉钩四另一端铰接在销二上;所述销二铰接在固定座二上,所述固定座二固定在车架上。
16.在其中一个实施例中,所述拉钩二另一端在全自力驱动机构中,不用铰接在销一上,而是铰接在拉杆上;所述拉钩四另一端在全自力驱动机构中,不用铰接在销二上,而是铰接在拉杆上。
17.在其中一个实施例中,所述动力体一、动力体二,自身带有动力装置或自身材料具有变形的应力,比如电力、机械结构驱动的可以产生力的装置,或者如弹性件,所述动力体一、动力体二是一种可以产生力的装置,是自力驱动机构的动力源,是驱动自行车车轮转动前行的动力源。
18.在其中一个实施例中,所述支撑杆设有上支撑杆与下支撑杆,上支撑杆上端固定连接在自行车车架上,下端与下支撑杆一端是有限度的上下滑动连接,所述弹性件安装在上支撑杆与下支撑杆之内的中空部分;下支撑杆另一端设有轴端,压轮铰接在下支撑杆的轴端,所述压轮绕下支撑杆轴端旋转,且所述压轮与所述行星轮一啮合。所述支撑杆是固定连接在横梁上的,支撑杆的轴线是固定不变的,当所述行星轮一与压轮啮合后阻止行星轮一在行程轮内齿上进一步上移,对所述行星轮一上移限位。同时人体重力也可以施加到所述行星轮一上,改变所述行星轮一在行程轮内齿上的位置,增加力矩。
19.本实用新型提供的自力自行车,通过构建物理量力矩、改变力矩的大小与方向,来满足旋转的条件实现驱动自行车车轮的旋转转动。详细说明如下。
附图说明
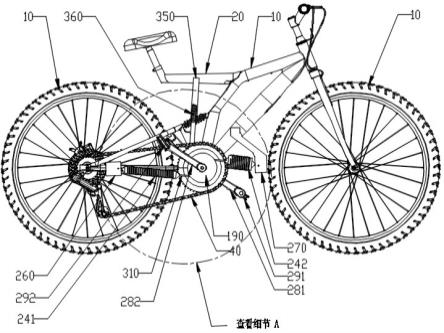
20.图1半自力驱动机构正向视图
21.图2半自力驱动机构分解图
22.图3在图1细节a处,中轴等构件结构图
23.图4在图1细节a处,支撑轮等构件结构图
24.图5在图1细节a处,行程轮等构件结构图
25.图6在图1细节a处,换向轮等构件结构图
26.图7为半自力驱动机构换向轮结构反向视图
27.图8为半自力驱动机构力矩示意图
28.图9为全自力驱动机构结构图
29.图10为全自力驱动机构力矩示意图
30.图11为自力驱动机构对自行车轮的驱动正面图
31.图12为自力驱动机构对自行车轮的驱动反面图
32.附图标记,见下表。带小数点的标号,为小数点前整数标号所代表的零件的特征;多个标号叠在一起,表示标号元件或特征有配合关系。
33.名称标号名称标号名称标号车架10换向轮190脚踏板轴二302横梁20内齿190.1拉钩一310中轴座30棘轮190.2拉钩二320链条40棘爪盘200拉钩三330后轴50键槽200.1拉钩四340钢圈60中轴孔200.2支撑杆350中轴100棘爪210上支撑杆350.1轴套110弹簧片220下支撑杆350.2轴端盖120连杆230轴端350.3支撑轮130销孔一230.1弹性件360行星轮一140销孔二230.2压轮370键槽140.1销孔三230.3拉杆400行星轮二150动力体一241ꢀꢀ键槽150.1动力体二242传动轴一410行星轮三160固定座一260ꢀꢀ键槽160.1固定座二270传动轴二420行星轮四170曲柄一281ꢀꢀ键槽170.1曲柄二282u型轴承430行程轮180曲柄三283销一441内齿180.1脚踏板一291销二442链盘181脚踏板二292键445链轮182脚踏板轴301ꢀꢀ
具体实施方式
34.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中
给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
35.需要说明的是,当元件被称为“固定”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“前”、“后”、“内”、“外”、“左”、“右”、“上”、“下”、“中”、“直线”、“线性”、“水平”、“垂直”、“顺时针”、“逆时针”、“高”、“低”“大”、“小”、“重合”、“中点”、“中心”、“等于”、“居中”、“过盈配合”、“过渡配合”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。为叙述方便,以车轮接触地面的方向为下,相反的方向为上。除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。本发明所列出的实施方式可通过其他的各各种方式来实施,能够在不脱离发明主旨的范围内进行各种省略、替换、变更、叠加。这些实施方式及其变形包含在本发明的范围及主旨之内,同样地包含在权利要求书中记载的发明和其等同范围内。
36.请参阅图1、图2、图3、图4。
37.自力自行车,由车轮、龙头、座垫、车架10等基本件组成的,在动力驱动部分,由自力驱动机构组成。支撑杆350设有上支撑杆350.1与下支撑杆350.2的特征(图7),上支撑杆350.1固定连接在横梁20上,下支撑杆350.2与上支撑杆350.1套设且有限度的上下滑动连接,在上支撑杆350.1与下支撑杆的内部中空部分,安装有弹性件360,图1中的支撑杆为剖视图,方便看到内部的弹性件360,在下支撑杆350.2上设有轴端350.3特征,压轮370铰接在轴端上,自由旋转(图3、图7)。当行星轮一140与压轮370啮合后阻止行星轮一140在行程轮内齿180.1上进一步上移,对行星轮一140上移限位,同时人体重力也可以施加到行星轮一140上,改变行星轮一140在行程轮内齿上的位置,增加力矩。固定座一260、固定座二270固定连接在车架10上。销一441铰接在固定座一260上,可以自由转动;拉钩二320一端钩住销一441,另一端固定连接动力体一241,动力体241另一端固定连接拉钩一310,拉钩一310另一端钩住传动轴一410,传动轴一410与拉钩一310构成铰接关系,传动轴一410可在拉钩一310钩内旋转。销二442铰接在固定座二270上,可以自由转动;拉钩四340一端钩住销二442,另一端固定连接动力体二242,动力体242另一端固定连接拉钩三330,拉钩三330另一端钩住传动轴二420,传动轴二420与拉钩三330构成铰接关系,传动轴二可在拉钩三330钩内旋转。固定座一260与固定座二270是固定连接在车架上的固定构件,动力体一241、动力体二242的一端连接在固定构件上的连接方式,是半自力驱动机构。脚踏板一291铰接在脚踏板轴一301上,脚踏板轴一301铰接在曲柄281一端,曲柄一281另一端固定键连接在中轴100一端。中轴100另一端固定键连接曲柄二282,曲柄二282另一端铰接脚踏板轴二302,脚踏板二292铰接在脚踏板轴二302上。
38.参阅图2、图3,轴套110安装在车架中轴座30内,两端被轴端盖120固定在中轴座30上。中轴100安装在轴套110中自由旋转,两端被轴端盖120轴向限位。图3中,传动轴一410与行星轮一140键连接,压轮370与行星轮一140可以啮合运行,由于压轮370安装在支撑杆轴
端350.3上,行星轮一140与压轮啮合后被支撑杆350限位,不能上移了。
39.参阅图4,支撑轮130套设在中轴100上,绕中轴100旋转。行星轮一140、行星轮二150与支撑轮130啮合,绕支撑轮行星旋转。行程轮内圈设有内齿180.1特征,链盘181固定套设在行程轮外圈,链盘181上的链轮与链条40啮合。行星轮一140、行星轮二150与支撑轮130啮合的同时,也与行程轮内齿180.1啮合。传动轴一410与行星轮一140键连接,传动轴二420与行星轮二150键连接。支撑轮130支撑行星轮一140、行星轮二150、行程轮180。
40.请参阅图5,连杆230设有销孔一230.1、销孔二230.2、销孔三230.3特征。中轴100穿过销孔230.2,连杆230居中铰接在中轴100上,绕中轴100旋转,连杆销孔一230.1铰接传动轴一410,连杆销孔三230.3铰接传动轴二420。行星轮三160键连接在传动轴一410上,行星轮四170键连接在传动轴420上。棘爪盘设有键槽200.1,中轴孔200.2,中轴100穿过中轴孔200.2,棘爪盘200键连接在中轴100上,棘爪210铰接在棘爪盘200上,弹簧片220支撑棘爪210。
41.请参阅图6、图7。换向轮190设有内齿190.1、棘轮190.2特征,套设在中轴100上,受中轴100支撑且绕中轴100旋转。图6中,为方便看到换向轮190的连接结构,剖去了换向轮190的后盖,只能看到换向轮内齿190.1与棘轮190.2。图7,是从反向观看换向轮的整体连接结构。图6中,行星轮三160、行星轮四170与换向轮内齿190.1啮合,换向轮上的棘轮190.2与棘爪啮合(图7)。中轴100顺时针旋转时,带动棘爪盘200旋转,棘爪盘200旋转带动棘爪210旋转,棘爪210的旋转带动换向轮的棘轮190.2旋转。当中轴逆时针旋转时,棘爪210不能带动棘轮190.2旋转。棘爪盘200、棘爪210、弹簧片220及换向轮190上设置的棘轮190.2特征,组成棘轮组件。在换向轮190与行程轮180对行星轮一140、行星轮二150的传动变化相同时,且把棘轮组件设置在行星轮一140、行星轮二150中时,支撑轮是可以固定设置的。
42.请参阅图9。图9是全自力驱动机构的连接图,在半自力驱动机构的基础上改变了动力体一241、动力体二242一端的连接位置,删减了半自力驱动机构的构件支撑杆350、固定座一260、固定座二270;增设拉杆400与曲柄三283构件。拉杆400分别铰接在曲柄二282、曲柄三283一端;曲柄三283另一端固定连接在中轴100上,与曲柄二282相差180度同时随中轴100旋转。钩在固定座一260销一441上的拉钩二320一端,改为钩在铰接在曲柄二282上的拉杆400上,钩在固定座二270销二442上的拉钩二340一端,改为钩在铰接在曲柄三283上的拉杆400上。除此之外,全自力驱动机构的其它构件结构与半自力驱动机构没有差异,动作原理也是一样的。拉钩二320一端改为钩在铰接在曲柄二282的拉杆400上,拉钩二340一端改为钩在铰接在曲柄三283的拉杆400上。
43.自力自行车的行走过程。请参阅全图。
44.脚踩脚踏板一291、脚踏板二292,带动中轴100顺时针旋转,中轴100旋转,带动与之键连接的棘爪盘200旋转,铰接在棘爪盘200上的棘爪210带动换向轮棘轮190.2旋转,棘轮190.2是换向轮的特征,棘轮190.2的旋转即是换向轮190旋转,换向轮190随中轴100旋转,换向轮190的内齿190.1特征也一并旋转;换向轮内齿190.1与行星轮三160、行星轮四170是啮合状态,换向轮内齿190.1与行星轮三160、行星轮四170是齿轮传动关系,换向轮内齿190.1的转动,带动行星轮三160、行星轮四170转动。行星轮三160、行星轮一140与传动轴一410是键连接,行星轮三160、行星轮一140同轴转动,行星三160的旋转,由传动轴410带动行星轮一140旋转。行星轮四170、行星轮二150与传动轴二420也是键连接,行星轮三170、行
星轮一150同轴转动,行星三170的旋转,由传动轴420带动行星轮二150旋转。连杆230铰接在中轴100上,绕中轴100旋转,连杆销孔一230.1铰接传动轴一410,连杆销孔三230.3铰接传动轴二420。传动轴一410与行星轮一140、行星轮三160键连接且铰接在连杆销孔一230.1端;传动轴二420与行星轮二150、行星轮四170键连接且铰接在连杆销孔三230.3端,行星轮一140、传动轴一410、行星轮三160与行星轮二150、传动轴二420、行星轮四170在旋转角度相差180度。行星轮一140、行星轮二150与行程轮内齿180.1啮合,是齿轮传动关系。行程轮180上固定连接有链盘181,链盘181上的链轮与链条40啮合,链条40上带动的是自行车的车轮转动的负载,行程轮180的转动,就是带动自行车的负载。行星轮一140、行星轮二150 在与行程轮内齿180.啮合的同时,行星轮一140、行星轮二150与支撑轮130也是处于啮合状态,行星轮一140、行星轮二150绕支撑轮130旋转滚动,支撑轮130绕中轴100旋转。由于传动轴一410、传动轴二420分别带动行星轮一140、行星轮二150旋转,在没有用拉钩一310、拉钩三330把动力体一241、动力体二242连接到传动轴一410、传动轴420上时,脚踩脚踏板一291、脚踏板二292传递过来的动力,带动行星轮一140、行星轮二150沿行程轮内齿180.1啮合旋转滚动,因行程轮180是带动自行车负载,没有旋转力矩的驱动,而不会被行星轮一140、行星轮二150的旋转而带动旋转,行星轮一140、行星轮二150绕行程轮内齿180.1自转旋转滚动,带动支撑轮130旋转,行星轮一140、行星轮二150同时也绕支撑轮130公转。行程轮内齿180.1就是行星轮一140、行星轮二150的旋转滚动的行程路径。就是说,动力体一241、动力体242没有接入自力驱动机构的传动链中,脚踩脚踏板一291、脚踏板二292传递过来的动力在行程轮180上没有旋转力矩,不能驱动行程轮180的旋转,不会带动链条40旋转驱动自行车轮的转动前行,只会驱动行星轮一140、行星轮二150在行程轮内齿180.1上旋转滚动,绕支撑轮130的自转与公转,也是空转。当动力体一241、动力体242接入自力驱动机构的传动链中,行星轮一140、行星轮二150绕支撑轮130的自转与公转就不再是空转。固定座一260、固定座二270固定连接在车架10上。销一441铰接在固定座一260上,可以自由转动;拉钩二320一端钩住销一441,另一端固定连接动力体一241一端,动力体241另一端固定连接拉钩一310一端,拉钩一310另一端钩住传动轴一410,传动轴一410与拉钩一310构成铰接关系,传动轴一410可在拉钩一310钩内旋转。销二442铰接在固定座二270上,可以自由转动;拉钩四340一端钩住销二442,另一端固定连接动力体二242一端,动力体242另一端固定连接拉钩三330一端,拉钩三330另一端钩住传动轴二420,传动轴二420与拉钩三330构成铰接关系,传动轴二可在拉钩三330钩内旋转。
45.拉钩一310钩住传动轴一410,拉钩三330钩住传动轴二420,行星轮一140、行星轮二150的旋转带动与其键连接的传动轴一410、传动轴二420旋转时,传动轴一410、传动轴二420也在拉钩一310、拉钩三330的钩内旋转(摩擦力忽略不计),且传动轴一410、传动轴二420受到了动力体一241、动力体242的拉力作用。
46.参阅图8、图10。为方便叙述,设传动轴一410与行星轮一140的中点在平面上的重合点为b点,传动轴二420与行星轮二150的中点在平面上的重合点为d点;拉钩二320与销一441的中点在平面上的重合点为a点,拉钩四340与销二442的中点在平面上的重合点为c点。设中轴100的中点及与中轴100同轴的各构件的中点,在平面上为o。r为以中轴100中点为圆心到传动轴一410或传动轴二420中点b或d为半径的圆半径。f1为动力体一241的拉力;m1为动力体一241的拉力f1产生的力矩;f2为动力体二242的拉力;m2为动力体二242的拉力f2产
生的力矩。力夹角x为ba与ob或dc与od连线之间的夹角。
47.传动轴一410受到动力体一241的拉力为f1, 传动轴二420受到动力体二242的拉力为f2。f1与f2是有方向的,拉力f1的方向是由b点指向a点,拉力f2的方向是由d点指向c点。力有了方向就是矢量,f1与f2就是矢量,力作用点在b点与d点,行程轮内齿180.1与行星轮一140、行星轮二150啮合,f1与f2的力作用点也施加到行程轮内齿180.1的对应点上,对行程轮180产生了力矩m1、m2。动力体一241、动力体242接入自力驱动机构的传动链中,在传动链运动时对b、d两点施加作用力,产生了力矩m1、m2,建立了驱动行程轮180旋转所必须的条件,驱动行程轮180的旋转。启动自力驱动机构的传动链,脚踩脚踏板一291、脚踏板二292旋转,带动中轴100旋转,再带动棘爪盘200旋转,再带动换向轮190旋转,再带动行星轮三160、行星轮四170旋转,再带动传动轴一410、传动轴二420旋转,再带动行星轮一140、行星轮二150旋转,行星轮一140、行星轮二150自转且绕支撑轮130公转,沿行程轮内齿180.1旋转滚动,改变行星轮一140、行星轮二150在行程轮180所在圆象限上的位置,就改变力夹角x的角度,即改变b、d两个力作用点在行程轮180所在圆象限上的位置,改变力矩m1、m2的大小与方向。在本文所述的象限,是建立在笛卡尔坐标系中的行程轮180所在的圆上,以y轴为分界,当拉力f2方向趋向笛卡尔坐标系中x 方向时,拉力f2施加作用力于d点,驱动行程轮180所在的圆顺时针旋转,d点所在该圆的象限为第一象限;驱动行程轮180所在的圆逆时针旋转,d点所在该圆的象限为第四象限。以y轴为分界,当拉力f1方向趋向笛卡尔坐标系中x-方向时,拉力f1施加作用力于b点,驱动行程轮180所在的圆顺时针旋转,b点所在该圆的象限为第三象限;驱动行程轮180所在的圆逆时针旋转,b点所在该圆的象限为第二象限。
48.动力体一241、动力体二242的拉力施加在传动轴一410、传动轴420上,在自力驱动机构的传动链上,行星轮一140、行星轮二150在沿行程轮内齿自转旋转滚动时,力夹角x不等于0度或180度,就有力矩m1、m2施加到行程轮180上,驱动行程轮180旋转。行程轮180的旋转,固定在行程轮180上的链盘181随之旋转,与链盘上的链轮啮合的链条被带动,链条再带动自行车轮的旋转滚动,从脚踩脚踏板一291、脚脚板二292,到链条40旋转带动车轮转动,走完自力驱动机构的传动链传动过程,实现自行车车轮的滚动前行。
49.行星轮一140与行星轮二150沿行程轮内齿180.1的旋转滚动,是对力夹角x大小及作用点b、d位置的改变,是对动力体一241、动力体二242拉力f1、f2施加在行程轮180上的旋转力矩m1、m2、及这对力偶矩的方向、大小的改变。力矩m1的大小m1=f1*r*sinx,力矩m2的大小m2=f2*r*sinx。动力体一241与动力体二242的拉力f1与f2,若为相等,因为f1与f2的力作用点,在连杆230两端的传动轴一410、传动轴420上,当力夹角x不等于0或180度时,即f1与f2不在一条直线上时,f1与f2大小相等、方向相反、平行且不在一条直线上,是一对力偶,m1与m2也大小相等,方向相反,平行且不在一条直线上,是一对力偶矩。连杆230两端铰接传动轴一410、传动轴二420,行星轮一140、行星轮二150键连接在传动轴一410、传动轴二420上,即行星轮一140、行星轮二150铰接在连杆230两端,动力体一241、动力体二242的拉力f1、f2方向相反,改变连杆230的位置,也改变动力体一241、动力体二242的拉力f1、f2作力点b、d点的位置,改变力矩m1、m2的大小。
50.当力夹角x等于0或180度时,力矩为0,支撑杆350上的压轮370与行星轮啮合,行星轮一140受到人体重力的下压驱动行星轮一140沿行程轮内齿180.1旋转位移,f1的力作用点b点改变位置,产生力矩,提供驱动行程轮180旋转的力矩。支撑杆350就是阻止行星轮一
140进入以行程轮180所在的圆的第一象限与第二象限;因为行星轮一140与行星轮三160分别键连接传动轮一410与传动轮二420,传动轮一410与传动轮二420是铰接在连杆230两端,行星轮一140与行星轮三160相位角相差180,也阻止行星轮三160进入以行程轮180所在的圆的第三象限与第四象限。当脚踩脚踏板一191、脚踏板二292顺时针旋转时,自力驱动机构的传动链的传动方向在行程轮180上也需要是顺时针的,要与传动链的方向保持一致。动力体一241产生的力矩m1只能在行程轮180所在的圆的第三象限、第四象限施加作用力,才能驱动行程180轮顺时针旋转。同样的,动力体242产生的力矩m2只能在行程轮180所在的圆的第一象限、第二象限施加作用力,才能驱动行程轮180顺时针旋转。
51.全自力驱动机构运动过程与半自力驱动机构的运动原理一样,如下所述。
52.参阅图3、图9、图10,在全自力驱动机构中,动力体一241一端固定连接拉钩二320,拉钩二320另一端与铰接在曲柄二282上的拉杆400链接;动力体二242一端固定连接在拉钩340上,拉钩二340另一端与铰接在曲柄三283上的拉杆400铰接。半自力驱动机构中,动力体一241与动力体二242与车架固定的一端,改到旋转的曲柄二282与曲柄三283的拉杆400上,曲柄二282与曲柄三283上在活动构件,非固定的,铰接在曲柄二282与曲柄三283上拉杆400也是活动构件。动力体一241、动力体二242的一端连接在活动构件上的连接方式,是全自力驱动机构。曲柄二282与曲柄三283同随中轴100旋转,角度相差180度。a点是曲柄二282上的拉杆400与拉钩二320中点在平面上重合的中点,c点是曲柄三283上的拉杆400与拉钩四340的中点在平面上重合的中点;传动轴一410与行星轮一140的中点在平面上的重合点为b点,传动轴二420与行星轮二150的中点在平面上的重合点为d点;设中轴100的中点及与中轴100同轴的各构件的中点,在平面上为o点。r为以中轴100中点为圆心到传动轴一410或传动轴二420中点b或d为半径的圆半径。f1为动力体一241的拉力;m1为动力体一241的拉力f1产生的力矩;f2为动力体二242的拉力;m2为动力体二242的拉力f2产生的力矩。力夹角x为ba与ob或dc与od连线之间的夹角。全自力驱动机构,与半自力驱动机构的工作原理一样,仍然是建立旋转所必须的条件,把力矩m1、m2建立起来。
53.在脚未踩脚踏板一291、脚踏板二292,自力驱动机构的传动链上的行星轮一140、行星轮三160没有被施加作用力,动力体一241一端固定在拉钩二320一端,拉钩二320另一端铰接在曲柄二282上的拉杆400上,动力体一241另一端固定在拉钩一310一端上,拉钩一310另一端铰接在传动轴一410上,动力体一241的拉力f1把传动轮一410拉平,使力夹角x趋向于0,力矩m1接近于0,不能满足驱动行程轮180旋转的条件。动力体二242一端固定在拉钩四340一端,拉钩四340另一端铰接在曲柄三283上的拉杆400上,动力体二242另一端固定在拉钩三330一端,拉钩三330另一端铰接在传动轴二420上,动力体二242的拉力f2把传动轮二420拉平,使力夹角x趋向于0,力矩m2接近于0,也不能满足驱动行程轮180旋转的条件。
54.当启动自力驱动机构的传动链,脚踩脚踏板一291、脚踏板二292顺时针旋转,曲柄二282、曲柄三283也跟随旋转,通过带动中轴100旋转,再带动棘爪盘200旋转,再带动换向轮190旋转,再带动行星轮三160、行星轮四170旋转,再带动传动轴一410、传动轴二420旋转,再带动行星轮一140、行星轮二150旋转,行星轮一140、行星轮二150自转且绕支撑轮130公转,沿行程轮内齿180.1旋转滚动,改变行星轮一140、行星轮二150在行程轮180所在圆象限上的位置,改变力夹角x的角度,即b、d两个力作用点位置,改变力矩、力偶矩的大小与方向。动力体一241、动力体二242的拉力f1、f2施加在传动轴一410、传动轴420上。行星轮一
140、行星轮二150在沿行程轮内齿自转旋转滚动时,力夹角x不等于0度或180度,就有力矩m1、m2作用力施加到行程轮180上,驱动行程轮180旋转。行程轮180的旋转,固定在行程轮180上的链盘181随之旋转,与链盘上的链轮啮合的链条被带动,链条再带动自行车轮的旋转滚动,从脚踩脚踏板一291、脚脚板二292,到链条40旋转带动车轮转动,走完自力驱动机构的传动链,实现自行车车轮滚动前行。
55.在自力驱动机构的传动链中,有棘轮组件参与其中,是通过安装的中轴100上的棘爪盘200带动的。但是,棘轮组件的作用是为了避免在传动链方向相反的力矩输出而设置,并不局限于安装在中轴100的传动中,也可以安装在行星轮一140、行星轮三160、传动轴一410、传动轴二420等自力驱动机构传动链的其它构件中。行星轮三160、行星轮四170与换向轮190组成的换向加速组件,是为了确保行星轮一140、行星轮二150的旋转方向,与自行车轮前进的方向一致而设置,并且加大换向轮与行星轮一140、行星轮二150的齿轮传动变比,提高行星轮一140、行星轮二150的旋转速度而设置。
56.在曲柄二282、曲柄三283跟随脚踏板一191、脚踏板二292旋转时,因为力夹角x的存在,曲柄二282、曲柄三283的旋转角度超前行程轮180的旋转角度,拉钩二320一端铰接在曲柄二282拉杆400上、拉钩二340一端铰接在曲柄二283的拉杆400上;拉钩320、拉钩340另一端分别连接动力体一241、动力体242一端,动力体一241、动力体242另一端,分别连接拉钩一310、拉钩三330一端,拉钩一310、拉钩三330另一端连接传动轴一410、传动轴二420,传动轴一410、传动轴二420被行星轮一140、行星轮二150带动在行星轮180上旋转。也就是说,动力体一241、动力体二242一端侧随曲柄二282、曲柄三283旋转,另一端侧随行程轮180旋转;动力体一241、动力体二242一端随曲柄二282、曲柄三283旋转的角度超前另一端随行程轮180旋转的角度。这个超前角度不超过跨越象限的180度。在时序上,行程轮180跟随曲柄二282、曲柄三283旋转,行程轮180所在圆也跟随曲柄二282、曲柄三283旋转。力矩m1、m2作力点b、d两点在行程轮180所在圆的象限上的坐标系与a、b两点在曲柄二282、曲柄三283上的坐标系的位置相对旋转位移,保持b、d两点在行程轮180所在圆的象限位置,始终是在驱动行程轮180顺时针旋转的象限内。而在在半自力驱动机构中,由于动力体一241、动力体242一端是固定的,那f1、m1的作力点b点就有固定的区域,为了驱动行程轮180顺时针的旋转,不能跨越出行程轮180所在圆的第三、第四象限;f2、m2的作力点d点也有固定的区域,为了驱动行程轮180顺时针的旋转,不能跨越出行程轮180所在圆的第一、第二象限。
57.请参阅图11、图12。
58.自力驱动机构驱动的对象是旋转体,因此也可以对自行车车轮的驱动,以上所述半自力驱动机构的驱动对象是链盘,以下半自力驱动机构的驱动对象改变为车轮。固定座二270固定在车架10,拉钩四340一端在销二442上,另一端固定连接动力体二242一端;动力体二242另一端固定连接拉钩三330一端,拉钩三330另一端钩在u型轴承430的u型槽内。u型轴承430套设在传动轴一420上。
59.c点是销二442的中点在平面上的中点;d点是传动轴二420与行星轮二150的中点在平面上的重合点;o点是后轴50、支撑轮130、行程轮180、钢圈60的中点在平面上的重合点。r为后轴50中点为圆心到传动轴一410或传动轴二420中点b或d为半径的圆半径。f2为动力体二242的拉力;m2为动力体二242的拉力f2产生的力矩。力夹角x为dc与od连线之间的夹角。
60.在后车轮上,行程轮180固定在钢圈60上。支撑轮130套设在后轴50上且轴向固定,连杆销孔二230.2穿过后轴,连杆230也套设在后轴50上且轴向固定。为防止行程轮180的轴向窜动,连杆230设为一对,安装在行程轮180两边,连杆230两端挡住行程轮180的轴向窜动,为便于叙述,图中只在行程轮180的一边画出了连杆230。传动轴一410铰接在连杆销孔一230.1且轴向固定,行星轮一140键连接在传动轴一410上。传动轴二420铰接在连杆销孔三230.3且轴向固定,行星轮二150键连接在传动轴二420上,链轮182也键连接在传动轴二420上,行星轮二150与链轮182同轴转动;链条40与链轮182啮合。行星轮一140、行星轮二150与支撑轮130啮合,绕支撑轮行星旋转。行程轮180内圈设有内齿180.1特征,行星轮一140、行星轮二150与支撑轮130啮合的同时,也与行程轮内齿180.1啮合。传动轴一410与行星轮一140键连接,传动轴二420与行星轮二150、链轮182键连接。支撑轮130支撑行星轮一140、行星轮二150、行程轮180。当脚踩脚踏板一291、脚踏板二292驱动链条40带动链轮182旋转,链轮182与行星轮二150同轴旋转,行星轮二150与行程轮内齿180.1啮合,行星轮二150的旋转,使行星轮二150在行程轮内齿180.1上滚动,带动支撑轮130旋转,行星轮二150在行程轮内齿180.1上滚动即改变力作用点d点的作用力位置。由于行星轮二150与u型轴承430共传动轴二420,动力体二242上的拉力f2施加到行星轮二150上,产生驱动行程轮180旋转的力矩m2,行程轮固定在钢圈60上,带动自行车轮的旋转滚动。
61.在全自力驱动机构中,行星轮一140与行星轮二150沿行程轮内齿180.1的旋转滚动,是对力夹角x大小及作用点b、d位置的改变,是对动力体一241、动力体二242拉力f1、f2施加在行程轮180上的旋转力矩m1、m2、及这对力偶矩的方向、大小的改变。力矩m1的大小m1=f1*r*sinx,力矩m2的大小m2=f2*r*sinx。动力体一241与动力体二242的拉力f1与f2,若相等,因为f1与f2的力作用点,在连杆230两端的传动轴一410、传动轴420上,当力夹角x不等于0或180度时,即f1与f2不在一条直线上时,f1与f2大小相等、方向相反、平行且不在一条直线上,是一对力偶,m1与m2也大小相等,方向相反,平行且不在一条直线上,是一对力偶矩。当力夹角x等于0或180度时,力矩为0,自行车车轮无法转动。
62.自力驱动机构驱动自行车车轮旋转滚动的原理,是把动力体一241、动力体二242提供的动力,转化为驱动自行车轮旋转滚动的力矩m1、m2。动力体一241、动力体二242的动力,通过拉钩一310、拉钩二320、拉钩三330、拉钩四340与固定座一260、固定座二270或者拉杆400等构件的组装连接,变成矢量拉力f1、f2;拉力f1、f2对旋转体的行程轮180的拉动,产生力矩m1、m2。力矩m1、m2驱动行程轮180的旋转,再带动链盘或带动钢圈的旋转,再带动车轮的旋转滚动。
63.自力驱动机构传动链的传动方向是顺时针的,在行程轮180上也需要是顺时针的。动力体一241产生的力矩m1只能在行程轮180所在的圆的第三象限、第四象限施加作用力,才能驱动行程180轮顺时针旋转。同样的,动力体242产生的力矩m2只能在行程轮180所在的圆的第一象限、第二象限施加作用力,才能驱动行程轮180顺时针旋转。力矩m1、m2的改变是通过行星轮一140保持在行程轮180所在的圆的第三象限、第四象限内旋转滚动,改变力矩的大小与方向来实现的;行星轮二150保持在行程轮180所在的圆的第一象限、第二象限内旋转滚动,改变力矩的大小与方向来实现的。曲柄二282、曲柄三283的旋转就是改变拉力f1、f2的大小,来改变行星轮一140与行星轮二150所在行程轮内齿180.1上的旋转滚动位置,来改变力矩m1、m2的方向与大小的。自力驱动机构的运动原理是,产生力矩,建立旋转所
需要的条件;再对力矩的大小与方向进行改变来实现驱动自行车车轮的滚动前行的。
64.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。所呈图例,虽是以直杆伞的形式出现,在其它类型的伞的结构、原理,思想上也同样适用。以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。