1.本实用新型涉及运输设备技术领域,更具体地说,涉及一种工业机器人运输装置。
背景技术:
2.agv小车进行运输时,一般其上方即为运载台,现有的运载台结构简单,难以对物品进行封闭运输,且运载台不能够自动打开或者闭合,若载物点和卸料点配有自动上料和自动取料装置,这就需要运载台能够自动开启,因此,需要提供一种基于agv小车的工业运输机器人,专利申请号cn202011302190.4中所公开的技术旨在解决上述问题。
3.但是现有的运输载台对运输物品的固定定位的结构复杂,导致装置的使用成本高,而且不能够对不同尺寸的物品进行固定定位,所以我们提出了一种工业机器人运输装置来解决上述存在的问题。
技术实现要素:
4.1.要解决的技术问题
5.针对现有技术中存在的问题,本实用新型的目的在于提供一种工业机器人运输装置,它可以实现装置结构简单,使用成本低,而且可对不同尺寸的物品进行夹持。
6.2.技术方案
7.为解决上述问题,本实用新型采用如下的技术方案。
8.一种工业机器人运输装置,包括移动底座,所述移动底座上方安装有顶板,所述顶板上表面固定连接有载板,所述载板上表面开设有凹槽,所述凹槽内侧对称固定连接有导向杆,所述导向杆外壁套接有硬质弹簧,所述硬质弹簧一侧活动设有滑座,所述滑座上表面边缘处固定连接有立板,所述立板表面安装有橡胶减震块,且橡胶减震块凸出于滑座边缘处,所述滑座一侧外壁安装有第一电磁块,所述凹槽与第一电磁块相对应的内壁安装有第二电磁块。
9.进一步的,所述凹槽对称设有两组,且两组所述凹槽之间相互垂直分布,每组所述凹槽对称设有两个,所述载板外壁焊接有安装耳,且安装耳通过螺栓与顶板相连接。
10.进一步的,所述硬质弹簧舒展长度与导向杆长度相同,且导向杆外径与硬质弹簧内径相适配,所述导向杆贯穿滑座,所述滑座与导向杆插接处开设有过孔,且所述过孔内径与导向杆外径相匹配,所述滑座另一侧外壁与硬质弹簧相抵接。
11.进一步的,所述立板一侧焊接有肋板,且肋板底部与滑座上表面相衔接,所述肋板呈直角梯形结构设置。
12.进一步的,所述第一电磁块与第二电磁块的同性磁极相对应。
13.进一步的,所述移动底座与顶板之间设有减震器,所述减震器对称设有两组,且每组所述减震器对称设有两个,所述减震器顶端与底端均固定连接有安装座,且所述安装座分别与移动底座和顶板相连接。
14.3.有益效果
15.相比于现有技术,本实用新型的优点在于:
16.本方案,通过第一电磁块与第二电磁块接通电源之后,由于第一电磁块与第二电磁块之间的同性磁极相对应,因此在同性相斥的磁性作用力下,滑座会配合导向杆滑动,从而使滑座远离第二电磁块,而且滑座在滑动的过程中将套接在导向杆上的硬质弹簧压缩变形,从而使立板之间的间距变大,然后将物品放置在载板上,然后通过第一电磁块与第二电磁块之间断开电源,第一电磁块与第二电磁块之间的磁性消失,从而使硬质弹簧在弹性力的作用下推动滑座反向滑动,从而使立板之间的间距缩小,进而使橡胶减震块与物品表面相抵接,可很好降低冲击力,从而对物品夹持固定,结构简单,使用成本低,而且可对不同尺寸的物品进行夹持。
附图说明
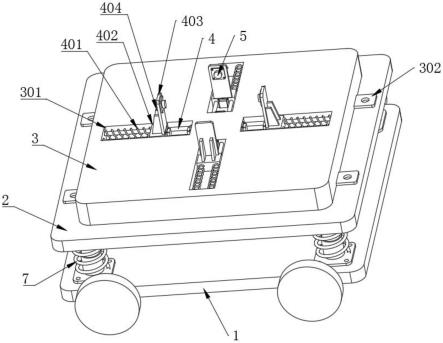
17.图1为本实用新型的立体结构示意图;
18.图2为本实用新型的载板俯视结构示意图;
19.图3为本实用新型的a部分放大示意图。
20.图中标号说明:
21.1、移动底座;
22.2、顶板;
23.3、载板;301、凹槽;302、安装耳;
24.4、导向杆;401、硬质弹簧;402、滑座;403、立板;404、肋板;
25.5、橡胶减震块;
26.6、第一电磁块;601、第二电磁块;
27.7、减震器。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.实施例1:
30.请参阅图1-3,一种工业机器人运输装置,包括移动底座1,移动底座1上方安装有顶板2,顶板2上表面固定连接有载板3,载板3上表面开设有凹槽301,凹槽301内侧对称固定连接有导向杆4,导向杆4外壁套接有硬质弹簧401,硬质弹簧401一侧活动设有滑座402,滑座402上表面边缘处固定连接有立板403,立板403表面安装有橡胶减震块5,且橡胶减震块5凸出于滑座402边缘处,滑座402一侧外壁安装有第一电磁块6,凹槽301与第一电磁块6相对应的内壁安装有第二电磁块601。
31.参阅图1,凹槽301对称设有两组,且两组凹槽301之间相互垂直分布,每组凹槽301对称设有两个,载板3外壁焊接有安装耳302,且安装耳302通过螺栓与顶板2相连接,通过设置安装耳302方便将载板3安装固定在顶板2上。
32.参阅图2,硬质弹簧401舒展长度与导向杆4长度相同,且导向杆4外径与硬质弹簧
401内径相适配,导向杆4贯穿滑座402,滑座402与导向杆4插接处开设有过孔,且过孔内径与导向杆4外径相匹配,滑座402另一侧外壁与硬质弹簧401相抵接,通过滑座402在导向杆4上滑动,并将套接在导向杆4上的硬质弹簧401压缩变形,同时利用硬质弹簧401的弹性作用力可使滑座402复位。
33.参阅图2,立板403一侧焊接有肋板404,且肋板404底部与滑座402上表面相衔接,肋板404呈直角梯形结构设置,增强立板403底部与滑座402上表面结合处的强度和刚性以及抗扭能力,可克服立板403因壁厚差别带来的应力不均所造成的制品歪扭变形,以增加结合面的强度。
34.参阅图2、图3,第一电磁块6与第二电磁块601的同性磁极相对应,通过第一电磁块6与第二电磁块601之间的磁性作用力,可使滑座402配合导向杆4滑动。
35.参阅图1,移动底座1与顶板2之间设有减震器7,减震器7对称设有两组,且每组减震器7对称设有两个,减震器7顶端与底端均固定连接有安装座,且安装座分别与移动底座1和顶板2相连接,当物品放置在载板3上之后,通过减震器7可有效的隔离振动并吸收冲击力,从而可降低物品放置时的振动力。
36.在使用时:通过第一电磁块6与第二电磁块601外接控制装置,利用控制装置控制第一电磁块6与第二电磁块601电源的断开与连通,在载板3上表面放置物品之前,通过第一电磁块6与第二电磁块601接通电源之后,由于第一电磁块6与第二电磁块601之间的同性磁极相对应,因此在同性相斥的磁性作用力下,滑座402会配合导向杆4滑动,从而使滑座402远离第二电磁块601,而且滑座402在滑动的过程中将套接在导向杆4上的硬质弹簧401压缩变形,从而使立板403之间的间距变大,然后将物品放置在载板3上,然后通过第一电磁块6与第二电磁块601之间断开电源,第一电磁块6与第二电磁块601之间的磁性消失,从而使硬质弹簧401在弹性力的作用下推动滑座402反向滑动,从而使立板403之间的间距缩小,进而使橡胶减震块5与物品表面相抵接,可很好降低冲击力,从而对物品夹持固定,结构简单,使用成本低,而且可对不同尺寸的物品进行夹持。
37.以上所述,仅为本实用新型较佳的具体实施方式;但本实用新型的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其改进构思加以等同替换或改变,都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。