1.本发明属于机器人领域,更具体地说,本发明涉及一种救援机器人。
背景技术:
2.随着核电技术的不断发展,核电的安全性也越来越得到重视,在核电设计和运营过程中,需要考虑核电事故下的救援问题。
3.相关技术中也公开了一些可用于核电事故下的救援机器人,但是,相关技术公开的救援机器人普遍都存在操作不灵活和作业范围小的缺陷,难以满足实际核电事故环境下的救援需求。有鉴于此,确有必要提供一种操作灵活的救援机器人。
技术实现要素:
4.本发明的目的在于:克服现有技术的至少一个缺陷,提供一种操作灵活的救援机器人。
5.为了实现上述目的,本发明提供了一种救援机器人,其包括:
6.行走装置;
7.动力平台,设置于所述行走装置上并可相对于所述行走装置旋转;以及
8.单独或协同作业的主工作装置和次工作装置,分别包括安装于所述动力平台上的机械臂、设置于所述机械臂末端的转接装置,以及安装于所述转接装置上的作业工具,其中,所述机械臂包括可转动连接于所述动力平台上的第一节臂、可转动连接于所述第一节臂上的第二节臂,可转动连接于第二节臂上的第三节臂,以及可转动连接于所述第三节臂上的摇臂,所述第一节臂和所述动力平台之间设有第一油缸,所述第二节臂上设有连接所述第一节臂和所述第二节臂的第二油缸、连接所述第二节臂和所述第三节臂的第三油缸,所述第三节臂和所述摇臂之间设有第四油缸,所述转接装置安装于所述摇臂上,且所述摇臂和所述转接装置之间设有摇摆油缸。
9.根据本发明救援机器人的一个实施方式,所述作业工具可拆卸安装于所述转接装置上,所述主工作装置的作业工具选自抱桶装置、搬运夹、破拆锤、液压锯或液压剪,所述次工作装置的作业工具选自抓斗、液压锯和液压剪。
10.根据本发明救援机器人的一个实施方式,所述转接装置包括设置于所述摇臂上的母头和设置于所述作业工具上的公头,所述母头上设有一对卡槽,所述公头上对应设有一对销轴,所述作业工具通过卡槽和销轴的配合可拆卸安装于所述摇臂上。
11.根据本发明救援机器人的一个实施方式,所述母头和公头中对应设有液压和电气接头组件,当所述卡槽和销轴卡紧时,所述母头和公头上对应的液压和电气接头组件接通。
12.根据本发明救援机器人的一个实施方式,所述主工作装置的作为工具为抱桶装置,所述抱桶装置包括安装座、旋转马达、抱桶油缸、支撑框架、抱桶爪和同步杆,所述抱桶抓上设有压力传感器,所述压力传感器通过接线与所述公头上的所述液压和电气接头组件相连,通过所述转接装置实现压力传感器上信号的接通与断开。
13.根据本发明救援机器人的一个实施方式,所述摇摆油缸带动所述转接装置相对于机械臂运动平面在一定角度范围内偏摆,例如在
±
20
°
范围内偏摆。
14.根据本发明救援机器人的一个实施方式,所述次工作装置平行于所述主工作装置,所述次工作装置相对于所述主工作装置的内偏摆角不小于5
°
,外偏摆角不小于45
°
。
15.根据本发明救援机器人的一个实施方式,所述动力平台上设有车载无线网桥,所述车载无线网桥通过远程端路由器控制,所述车载无线网桥和所述远程端路由器之间设有至少一个无线网络中继器。
16.相对于现有技术,本发明救援机器人中,机械臂包括可转动连接于动力平台上的第一节臂,可转动连接于第一节臂的第二节臂,可转动连接于第二节臂的第三节臂,以及可转动连接第三节臂的摇臂,第一节臂和动力平台之间设有第一油缸,第一油缸可驱动第一节臂相对于动力平台转动;第二节臂上设有连接第一节臂和第二节臂的第二油缸,以及连接第二节臂和第三节臂的第三油缸,通过第二油缸和第三油缸,可驱动第一节臂和第三节臂相对于第二节臂转动;第三节臂和摇臂之间设有第四油缸,通过第四油缸可驱动摇臂相对于第三节臂转动;摇臂和转接装置之间设有摇摆油缸,通过摇摆油缸能够带动转接装置垂直于机械臂的运动平面偏摆,并带动作业工具垂直于机械臂运动平面左右偏摆,因此可增加作业工具的灵活性,使作业工具能够完成更大范围的作业。
附图说明
17.下面结合附图和具体实施方式,对本发明救援机器人及其技术效果进行详细说明,其中:
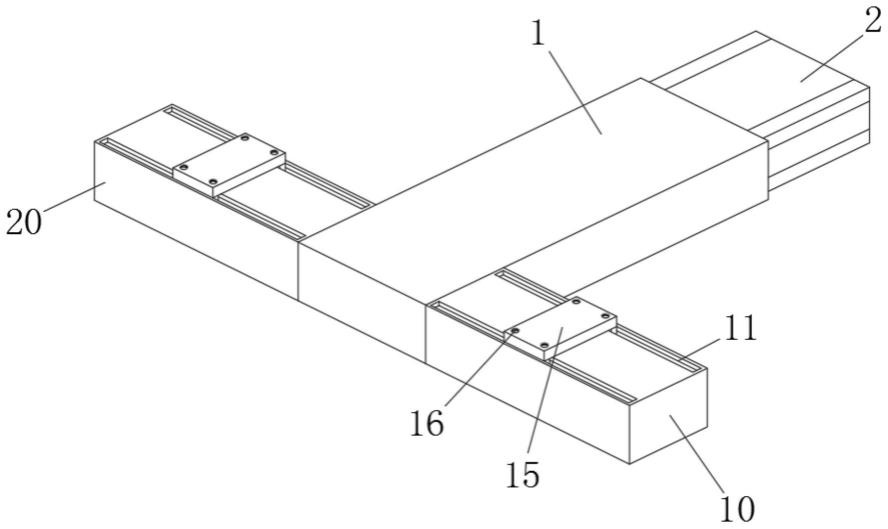
18.图1为本发明救援机器人的结构示意图。
19.图2为本发明救援机器人中主工作装置的结构示意图。
20.图3为本发明救援机器人中主工作装置的另一个结构示意图,其中,作业工具已移除。
21.图4为本发明救援机器人中转接装置的母头和公头的结构示意图。
22.图5a和5b分别为本发明救援机器人中转接装置的母头的不同视角的结构示意图。
23.图6为本发明救援机器人中抱桶装置的结构示意图。
24.图7为本发明救援机器人中主工作装置和次工作装置偏的摆角示意图。
25.图8为本发明救援机器人中无线视频传输及通信系统的示意图。
26.10
‑‑
行走装置;20
‑‑
动力平台;30
‑‑
主工作装置;40
‑‑
次工作装置;50
‑‑
机械臂;500
‑‑
第一节臂;501
‑‑
第一油缸;502
‑‑
第二节臂;503
‑‑
第二油缸;504
‑‑
第三油缸;505
‑‑
第三节臂;506
‑‑
第四油缸;507
‑‑
摇臂;508
‑‑
摇摆油缸;60
‑‑
转接装置;600
‑‑
母头;602
‑‑
公头;601
‑‑
固定卡槽;603
‑‑
销轴;604
‑‑
液压和电气接头组件;605
‑‑
脱扣油缸;606
‑‑
活动卡槽;70
‑‑
作业工具;700
‑‑
抱桶装置;702
‑‑
安装座;704
‑‑
旋转马达;706
‑‑
抱桶油缸;708
‑‑
支撑框架;710
‑‑
抱桶爪;712
‑‑
同步杆;714
‑‑
压力传感器。
具体实施方式
27.为了使本发明的发明目的、技术方案及其技术效果更加清晰,以下结合附图和具体实施方式,对本发明进行进一步详细说明。应当理解的是,本说明书中描述的具体实施方
式仅仅是为了解释本发明,并非为了限定本发明。
28.请参照图1所示,本发明提供了一种救援机器人,其包括:
29.行走装置10;
30.动力平台20,设置于行走装置10上并可相对于行走装置10旋转;以及
31.单独或协同作业的主工作装置30和次工作装置40,分别包括安装于动力平台20上的机械臂50、设置于机械臂50末端的转接装置60,以及可拆卸安装于转接装置60上的作业工具70,其中,机械臂50包括可转动连接于动力平台20上的第一节臂500、可转动连接于第一节臂500上的第二节臂502、可转动连接于第二节臂502上的第三节臂505,以及可动连接于第三节臂505上的摇臂507,第一节臂500和动力平台20之间设有第一油缸501,第二节臂502上设有连接第一节臂500和第二节臂502的第二油缸503、连接第二节臂502和第三节臂505的第三油缸504,第三节臂505和摇臂507之间设有第四油缸506,转接装置60安装于摇臂507上,且摇臂507和转接装置60之间设有摇摆油缸508。
32.请参照图1至图3所示,行走装置10为救援机器人的运动机构,其承受整个救援机器人的重量,行走装置10可以采用成熟的履带式设计,以实现救援机器人的前进、后退和转弯等。动力平台20设置于行走装置10上,并可相对于行走装置10在水平面内360
°
旋转,动力平台20主要用于布置救援机器人的动力系统、液压系统、电控系统和通讯系统(未图示),用于控制主工作装置30、次工作装置40的各个油缸、机械臂50和转接装置60的协同工作,并为主工作装置30、次工作装置40提供安装接口。
33.请参照图2所示,主工作装置30安装于动力平台20的前方,其包括安装于动力平台20上的机械臂50、设置于机械臂50上的转接装置60,以及可拆卸安装于转接装置60上的作业工具70,其中,机械臂50包括枢轴连接于动力平台20上的第一节臂500,可转动连接于第一节臂500远离动力平台20一端的第二节臂502,可转动连接于第二节臂502远离第一节臂500一端的第三节臂505,以及可转动设置于第三节臂505末端的摇臂504,第一节臂500和动力平台20之间设有第一油缸501,第一油缸501可驱动第一节臂500相对于动力平台20转动;第二节臂502上设有连接第一节臂500和第二节臂502的第二油缸503,以及连接第二节臂502和第三节臂505的第三油缸504,通过第二油缸503和第三油缸504,可驱动第一节臂500和第三节臂505相对于第二节臂502转动;第三节臂505和摇臂507之间设有第四油缸506,通过第四油缸506可驱动摇臂507相对于第三节臂505转动;摇臂507和转接装置60之间设有摇摆油缸508,通过摇摆油缸508能够带动转接装置60垂直于机械臂50的运动平面在一定范围内偏摆(例如,在
±
20
°
范围内偏摆),并带动作业工具70垂直于机械臂50运动平面左右偏摆,增加作业工具70的灵活性,使作业工具70能够完成更大范围的作业。
34.在实际救援工作过程中,第一节臂502与动力平台20之间可转动连接,第一节臂500和第二节臂502可转动连接,第二节臂502和第三节臂505可转动连接,摇臂507和第三节臂505可转动连接,通过控制第一油缸501、第二油缸503、第三油缸504、第四油缸506可以控制第一节臂500、第二节臂502、第三节臂505和摇臂507的姿态,通过控制摇臂油缸508可以控制作业工具70在机械臂50的摆动平面内的姿态,通过控制摇臂油缸508的动作可以使转接装置60左右摆动,因此,三节臂结构和摇臂油缸508的设置可显著增加机械臂50的灵活性,使机械臂50能够在较大的平面范围内动作。
35.请参照图4和图5a、5b所示,转接装置60包括与机械臂50末端相连的母头600和与
作业工具70相连的公头602,母头600与公头602之间在机械结构上可以通过固定卡槽601/活动卡槽606和销轴602固定或脱开。此外,在液压系统和电气系统上,母头600和公头602中对应设有液压和电气接头组件604,当机械结构中的固定卡槽601/活动卡槽606和销轴603卡紧时,母头600和公头602上对应的液压和电气接头组件604接通,从而为作业工具70提供液压动力和电气信号。
36.转接装置60连接在机械臂50的摆臂504末端上,平时,母头600中的脱扣油缸605为缩回状态,当要和安装在作业工具70末端的公头602完成连接时,远程操纵固定卡槽601与公头602上相应的销轴603结合,此时,机械臂50带动母头600抬起,通过固定卡槽601和公头602上的销轴603配合会将公头602和作业工具70同时抬起,公头602和作业工具70围绕公头602上已经固定的销轴603旋转,直至公头602上的液压和电气接头组件604在定位销的辅助下完全定位并结合。此时,公头602上的另外一条销轴603也正好到位,再控制脱扣油缸605伸出,连接在油缸杆头上的活动卡槽606一同伸出并卡住公头602上相应的销轴603,使得母头600上的两个卡槽601,606和公头602上的两个销轴603分别扣合,液压系统和电气信号也通过相应的接头组件连接,整个转接装置60和作业工具70就可以在机械臂50的带动下完成相应的作业。
37.当需要更换作业工具70时,操作者通过远程控制脱扣油缸605缩回,公头602上相应的一条销轴603与活动卡槽606脱开,通过机械臂50的动作使公头602和作业工具70围绕尚未脱开的一条销轴603转动,实现液压和电气接头组件604的脱开。此时,液压接头中的单向阀工作,将油口封闭,防止液压系统中的液压油外泄到作业环境中。控制机械臂50带动母头600并使母头600上的固定卡槽601和公头602上相应的销轴603脱开,实现作业工具70的分离。
38.请继续参照图2所示,主工作装置30的机械臂50末端可拆卸设有作业工具70,根据实际需要,可以选择不同的作业工具,不同的作业工具头可单独作业,也可以与次工作装置40的作业工具协同作业。例如,作业工具可以是抱桶装置、搬运夹、破拆锤、液压锯或液压剪,以实现应急通道路障清除、重型设备或瓦砾等障碍物移除和固体废物的收集转运。
39.以下结合附图对作业工具70进行说明,在图6所示的实施方式中,抱桶装置700包括安装座702、旋转马达704、抱桶油缸706、支撑框架708、抱桶爪710和同步杆712。为了避免抓取过程中部分物体夹破、夹裂,导致被抓取容器中的物质泄漏到环境中,抱桶装置700上添加了压力传感器714,能够实现夹持力5%以内的超调。
40.安装座702安装在转接装置60的公头602上的压力传感器底面上,压力传感器714通过接线与公头602上的液压和电气接头组件604相连,可通过转接装置60来实现压力传感器714上信号的接通与断开。当抱桶装置700开始工作时,操作者通过安装在机械臂50上的相机(未图示)辅助观察,使需要夹持的桶状物体完全在抱桶爪710中间。此时,控制抱桶油缸伸出706,通过抱桶爪710与支撑框架708之间的杠杆作用将物体夹紧,最终实现桶状物体的搬运和移动。
41.两个抱桶爪710之间添加了同步杆712,同步杆712、抱桶油缸706以及支撑框架708之间形成了联动机构,当抱桶油缸706伸缩时,能够使两个抱桶爪710打开的幅度相同,以确保抱桶爪710在将重物抱起后,不会出现两个抱桶爪710左右摆动幅度不一致或者抱起重物后抱桶爪710晃动的情况。
42.请继续参照图1所示,次工作装置40与主工作装置30平行设置,为了次工作装置40与主工作装置30的共同作业范围较大,次工作装置40的安装位置比主工作装置30的位置靠前。次工作装置40具有与主工作装置30相似的结构,也包括安装于动力平台上的机械臂、设置于机械臂末端的转接装置,以及可拆卸安装于转接装置上的作业工具,其中,机械臂包括可转动连接于动力平台上的第一节臂、可转动连接于第一节臂上的第二节臂,可转动连接于第二节臂上的第三节臂,以及可转动连接于第三节臂上的摇臂,第一节臂和动力平台之间设有第一油缸,第二节臂上设有连接第一节臂和第二节臂的第二油缸、连接第二节臂和摇臂的第三油缸,第三节臂和摇臂之间设有第四油缸,摇臂和转接装置之间连接有摇摆油缸。
43.次工作装置40与主工作装置30的不同之处在于:主工作装置30不能相对于动力平台20在水平面内左右摆动,只能在第一节臂500、第二节臂502、第三节臂505共同限定的竖直平面内俯仰运动;次工作装置40的第一节臂可转动连接于动力平台20上,因此,次工作装置40不仅可以在竖直平面内俯仰运动,而且还可以相对于动力平台20在一定范围内摆动,例如,请参照图7所示,次工作装置40相对于主工作装置30的内偏摆角不小于5
°
,外偏摆角不小于45
°
。次工作装置40的作业工具70选自抓斗、液压锯和液压剪,次工作装置40主要完成作业现场中管道、电缆等较长物体的切断,以及碎石等松散物体的抓取等工作。救援机器人在对较长的管道、线缆、钢筋等物体进行拆除作业时,无法通过单个工作装置完成所有的工作,此时需要主工作装置30和次工作装置40协同作业,通过两套工作装置30、40的相互配合来完成所需的工作。
44.考虑到救援环境下的高辐射,操作人员应该尽可能地远离救援现场,以减少对人员的伤害。请参照图8所示,救援机器人的动力平台20上设有车载无线网桥,车载无线网桥通过远程端路由器控制,且车载无线网桥和远程端路由器之间设有一个或多个无线网络中继器。无线网络中继器设置的数量可以根据安全操控的距离来确定,在实际救援过程中,可以由救援机器人在行进过程中按照预定的距离间隔自行设置,从而使得操作人员可以尽可能地远离事故现场,避免人体受到辐照伤害。
45.根据上述原理,本发明还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。