1.本实用新型涉及车用燃料加注设备技术领域,具体涉及一种双侧机器人加油机及尿素加注机。
背景技术:
2.加油站是利用加油机给车辆补给油料的场所,是国民经济中交通运输产业发展的重要产物。加油装置是为车辆加注燃油的一种专用设备,尿素加注机则主要用于柴油车辆尿素液的加注,实现车辆尾气排放净化处理,以满足环保国四及以上柴油车辆尾气排放的要求。传统的车辆加油和尿素加注方式主要以人工服务为主,其人力成本较高、智能化水平较低。随着技术的进步,现有技术也在向着车辆加注自动化方向发展,随后产生了自助加油模式:驾驶员支付现金或刷卡后自己操作加油枪给汽车加油;该加油模式在发达国家已广泛使用,我国也开始逐步采用。这种自助加油模式将专职加油员的工作转移给了驾驶员,要求驾驶员会操作使用加油机。但是这种方式一方面导致其客户的加油体验较差,另一方面加油效率也较低下。
3.现有的加油装置及尿素加注装置结构较为复杂,自动化程度低且只能进行单侧加油,对加油站的利用空间造成一定程度上的浪费,而且会降低加油站的加注效率。
技术实现要素:
4.本实用新型目的在于提供一种双侧机器人加油机及尿素加注机,旨在解决现有加油及尿素加注装置自动化程度低、占用空间大、加油效率低的技术问题。
5.为解决上述技术问题,本实用新型采用如下技术方案:
6.设计一种双侧机器人加油机,主要包括加油机箱体,所述加油机箱体左部前后侧均设置有加油执行模块,其右部设置有控制模块和计量模块;
7.所述加油执行模块包括设置在所述加油机箱体上部的平移机构,所述平移机构上安装有机械手,所述机械手的端部安装有加油装置,所述加油装置包括安装架和安装在所述安装架上的加油机构、外盖开合机构及内盖开合机构;
8.所述控制模块用于所述加油执行模块和计量模块的控制;
9.所述计量模块用于实现燃油的计量和付油控制,具备燃油的流量计量、信号转换、油路/油气的控制、油品清洁过滤的功能。
10.优选的,所述机械手为多转动关节的机械臂,用于所述加油装置的全方位移动。
11.优选的,所述平移机构包括设置在所述加油机箱体上的导轨、设置在所述导轨上用于安装所述机械手的滑块、设置在所述导轨侧面的用于驱动所述滑块的平移电机。
12.优选的,所述加油机构包括横杆和滑动于所述横杆的油枪座,所述油枪座上安装有油枪,所述油枪座电连接对应的滑动电机。
13.优选的,所述外盖开合机构包括电动推杆和安装在所述电动推杆端部的真空吸盘,所述真空吸盘连接有对应的负压源。
14.优选的,所述内盖开合机构包括旋转电机、安装于所述旋转电机输出端的内盖夹具,所述内盖夹具包括夹爪及控制其夹紧和松开的气缸。
15.优选的,所述旋转电机与所述内盖夹具之间设置有缓冲组件,用于抵消所述内盖夹具夹紧内盖并旋转时所产生的作用力。
16.优选的,所述缓冲组件包括立柱和设置在该立柱上的缓冲弹簧。
17.优选的,所述机械手上固定有管线包,以防止加油过程中因管线拖拉而造成的安全隐患。
18.设计一种双侧机器人尿素加注机,将上述双侧机器人加油机中的加油执行模块换成尿素加注执行模块,各个油路换成尿素液路,从而得到双侧机器人尿素加注机。
19.与现有技术相比,本实用新型的主要有益技术效果在于:
20.1.本实用新型通过在加油机箱体前后两侧均设置加油执行模块,从而使加油机两侧均可实现加油,进一步地提高了加油站的空间利用率和加油效率。
21.2.本实用新型通过一个机械手代替从前的两组机械手,使得加注装置更加简化,并采用控制系统对加油执行模块的控制,提高加油站的自动化程度。
附图说明
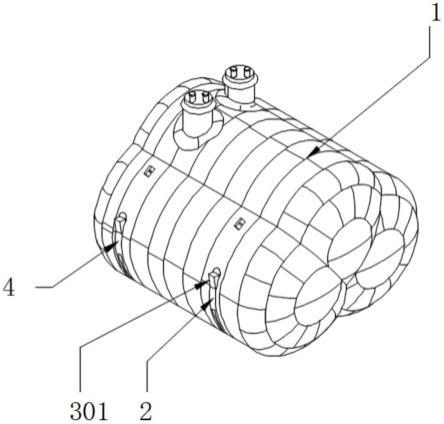
22.图1为本实用新型一种实施例的结构示意图之一。
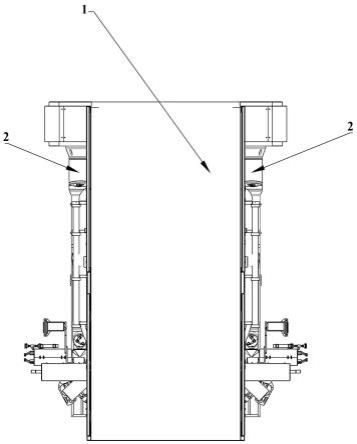
23.图2为本实用新型一种实施例的结构示意图之二。
24.图3为本实用新型一种实施例加油执行模块的结构示意图。
25.图4为本实用新型一种实施例加油装置的结构示意图。
26.图5为本实用新型一种实施例内盖启闭机构的结构示意图。
27.图6为本实用新型一种实施例平移机构的结构示意图。
28.以上各图中,1为加油机箱体,2为加油执行模块,21为机械手,22为管线包,23为加油装置,3为3d位置捕捉器,231为电动推杆,232为真空吸盘,233为内盖启闭机构,2331为旋转电机,2332为立柱,2333为缓冲弹簧,2334为气缸,2335为内盖夹具,234为油枪座,235为加油枪,236为安装架,41为导轨,42为滑块,43为平移电机,5为控制模块,6为计量模块。
具体实施方式
29.下面结合附图和实施例来说明本实用新型的具体实施方式,但以下实施例只是用来详细说明本实用新型,并不以任何方式限制本实用新型的范围。
30.在本实用新型的描述中,需要理解的是,如涉及术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.以下实施例中所涉及的单元模块(零部件、结构、机构)或传感器等器件,如无特别说明,则均为常规市售产品。
32.实施例1:一种双侧机器人加油机,参见图1至图6,主要包括加油机箱体1,所述加油机箱体1左部前后侧均设置有加油执行模块2,其右部设置有控制模块5和计量模块6;
33.所述加油执行模块2包括设置在所述加油机箱体1上部的平移机构,所述平移机构
上安装有机械手21,所述机械手21的端部安装有加油装置23,所述机械手21为六轴机械臂,用于控制所述加油装置23的全方位移动;所述加油装置23包括安装架236和安装在所述安装架236上的加油机构、外盖开合机构及内盖开合机构;所述加油装置23还包括用于捕捉加注口位置坐标信息的3d位置捕捉器3,所述3d位置捕捉器3设置在所述外盖启闭机构的上方。
34.所述平移机构包括设置在所述加油机箱体1上的导轨41、设置在所述导轨41上用于安装所述机械手21的滑块42、设置在所述导轨41侧面的用于驱动所述滑块42的平移电机43;所述加油机构包括横杆和滑动于所述横杆的油枪座234,所述油枪座234上安装有油枪,所述油枪座234电连接对应的滑动电机。
35.所述内盖开合机构包括旋转电机2331、安装于所述旋转电机2331输出端的内盖夹具2335,所述内盖夹具2335连接有控制其夹紧和松开的气缸2334;所述旋转电机2331与所述内盖夹具2335之间设置有缓冲组件,用于抵消所述内盖夹具2335夹紧内盖并旋转时所产生的作用力;所述缓冲组件包括立柱2332和设置在所述立柱2332上的缓冲弹簧2333;所述外盖开合机构包括电动推杆231和安装在所述电动推杆231端部的真空吸盘232,所述真空吸盘232连接有气泵;进行加油工作时,所述电动推杆231带动所述真空吸盘232靠近油箱内外盖,所述真空吸盘232在与其连接的气泵的作用下,吸住油箱外盖,所述电动推杆231带动所述真空吸盘232打开油箱外盖;所述气缸2334带动所述内盖夹具2335夹紧油箱内盖,并在所述旋转电机2331的带动下拧开油箱内盖,在所述内盖夹具2335旋拧油箱内盖时,所述气缸2334会向后产生位移,且油箱内盖各部件之间都为硬性连接,如果不能消除向后位移所产生的相对作用力,很可能会对部件之间的连接造成一定损伤,因此通过设置在所述旋转电机2331与所述内盖夹具2335之间的立柱2332以及套设于所述立柱2332上的缓冲弹簧2333,使所述气缸2334在向后位移时,可在一定弹性范围内反复运动,从而消除相对作用力对所述内盖启闭机构233的损坏。
36.所述控制模块5用于所述加油执行模块2和计量模块6的控制;所述计量模块6用于实现燃油的计量和付油控制,具备燃油的流量计量、信号转换、油路/油气的控制、油品清洁过滤的功能。所述控制模块5包括计量控制模块、支付模块、机器人控制模块、3d视觉控制模块、正压防爆控制模块、安全防护控制模块、主控模块;所述计量控制模块包括设置在所述加油机本体右侧的计控主板、通信主板、电源板、键盘和指示装置;所述支付模块包括支付主板、读卡器、键盘、键盘显示器、小票打印机。
37.所述机器人控制模块用于实现自动加油动作的控制与执行,包括机器人控制主板、机器人蓄能板、机器人i/o板、机器人电源;所述3d视觉控制模块控制所述3d位置捕捉器实现加注口不同位置的位姿坐标信息的提取,并将解析后的位姿坐标信息传输到所述主控模块,所述主控模块将要执行的指令传到所述机器人控制模块,所述机器人控制模块控制所述加油执行系统按程序执行相关动作;所述正压防爆控制模块用于实现防爆协作臂的正压系统控制,使机械臂具备防爆性能,包括正压控制板、流量传感器、压力传感器、电磁阀、温度传感器;主控模块用于实现整机控制,包含工艺流程控制、紧急启停、故障报警、后台管理系统的参数解析,各系统状态上传与显示、整机各模块的通信管理等功能。
38.所述计量模块6用于实现燃油的计量和付油控制,具备燃油的流量计量、信号转换、油路/油气的控制、油品清洁过滤等功能;且所述控制模块5与所述计量模块6之间设置
有中间隔离层,因为所述控制模块属于安全区,所述计量模块属于防爆区,以免发生不必要的影响;
39.实施例2:将所述的双侧机器人加油机中的加油执行模块2换成尿素加注执行模块,各个油路换成尿素液路,从而得到用于加注尿素的双侧机器人尿素加注机。
40.上述双侧机器人加油机及尿素加注机的操作使用方法如下:
41.进行加注工作时,可以在加注机的两侧同时进行加注工作,从而提高加油站的加注效率;用户将代加注车辆停靠至合适位置后,即可通过手机进行下单,加油站后台管理系统将加油指令发送给控制模块5,进而控制加油机进行加注工作,首先3d位置捕捉器3搜集车辆加注口位置信息,反馈给控制模块5,进而使机械手21带动加油装置23移至加注口位置处,进行加注工作,加注完成后,所述机械手21会在所述控制模块5的带动下归位。
42.上面结合附图和实施例对本实用新型作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本实用新型技术构思的前提下,还可以对上述实施例中的各个具体参数进行变更,或者对相关部件、结构及材料进行等同替代,从而形成多个具体的实施例,均为本实用新型的常见变化范围,在此不再一一详述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。