1.本实用新型是一种轮组控制结构,更具体地说,是一种可以切换平地驱动和爬楼状态的轮组结构。
背景技术:
2.现有技术中,日常生活或生产中人们常常由于重物太重或人手不足而无法搬运,传统的人力搬运的方式需要革新,为解放人力且为人们带来便利,机器人的研究制造具有重要意义,而爬楼机器人可以作为一个研究方向。据了解,目前大多数老人仍是居住在没有电梯设备的老旧居民楼,本系统从买菜车实现自动上楼的目的出发,有效的解决了大多数老人不方便提携买菜篮买菜车上楼等问题,此研究能够给人们的生活尤其是独居老人的生活在运输方面带来极大的便利。
3.爬楼机器人未来从半自动到全自动发展,能应用于工业生产中,在危险环境中侦察、救灾、导盲、助残、搬运、清扫、维修、安装等作业。爬楼机器人的研究是解决当前全自主机器人在非结构环境下正常工作的重要环节之一。爬楼机器人未来可以帮助解决物流方面的问题,送餐送水送货,解决重物上楼难、上楼烦的问题,能够减少人力成本,减轻人工消耗。
4.爬楼机器人能提高搬家过程的效率,代替人力搬家,货车搬家,还可以结合物联网技术实现远程操纵爬楼机器人搬家操作,安全高效的解决徒手搬家困难、人力不足的问题。现有技术的可以爬楼的轮组大致包括以下几种:
5.1)河北工程大学传动机器人设计
6.图1所示,轮组采用行星轮式结构,包括传动轴,过渡齿轮,中心齿轮,小车轮和驱动齿轮轮组的机械原理:车体重量通过轴承间接承载在四个轮组上,轮组中的所有齿轮都绕转臂上的小轴转动,当电机动力传到传动轴时,轴带动中心齿轮转动,中心齿轮带动过渡齿轮转动,再传给驱动齿轮,由于小车轮与驱动齿轮固连,机器人前进。当车轮组机构运行在平直的路面上时,受两个车轮同时着地的约束限制,转臂不能转动只能随车沿路面平动,此时驱动轮系为定轴轮系,实现机构在平直面上的快速行驶;当小车遇上台阶时,由于台阶与车轮的摩擦力,行星轮的齿轮系都被锁住,无法转动,这时整个行星轮板在中心齿轮的驱动下,变成一个类轮机构转动,从而带动小车爬上台阶。
7.2)传统式爬楼机器人
8.图2所示,该设计首先由电机提供驱动力,带动蜗杆驱动蜗轮转动,蜗轮与锥齿轮同轴相连,锥齿轮通过啮合将动力传递到前小轴,驱动轮组中心齿轮转动;在上楼梯时,锁轴器工作将小轴和管轴锁紧,小车轮不再转动以防止小车轮滑移,动力通过管轴传递到三星轮,驱动其转动。
9.该结构设计主要依靠电机的驱动力,从锁轴器的工作模式可以看出需要较大的驱动力使得小轴和管轴锁紧,因此需要较大的电机驱动力。
10.3)蜘蛛式爬楼机器人
11.图3所示,可变轮的设计是该方案的核心设计,通过轮子的变化,实现平地行走与爬楼两种功能,可变轮的设计是该方案的核心设计,通过轮子的变化,实现平地行走与爬楼两种功能,在平路上行走时,可变轮收缩成跟普通轮一样的轮子,可在平稳的路面上行驶。当爬楼时,爬升爪张开,通过爪与楼梯接触,使整个车架上升,从而完成爬楼过程。可变轮采用双电机结构,正常时,两个电机工作状态相同,当需要转弯时,通过控制电机,使两轮转速一大一小来实现转弯。
12.该设计突破传统思想,通过双电机结构使得车架上升完成-爬楼工作,但缺点在于张开过程如果楼梯角度过大,很有可能会由于着力点不好使得整体失去平衡。
13.4)履带式爬楼机器人
14.图4所示,驱动方式选用后轮驱动。驱动轮的主要作用是整体基本功能方案前或向后卷绕履带,同时承担着整体的部分重量。驱动轮的前置和后置有利有弊, 由图可以看到,驱动装置后置呈现出行驶技术上的优势,而前置时大部分履带在行驶时承受大牵引力,容易使履带伸长,在前行时导致前下部履带处形成所谓的“履带通过上述移动行走结构。履带式行走机构相对于脚式行走机构技术成熟,控制简单,且成本低。结合国内外机器人的性能特点及实际应用的要求.综合考虑多方面因素:选用履带式移动机构。驱动方式选用后轮驱动。驱动轮的主要作用是机器人基本功能方案前或向后卷绕履带,同时承担着机器人的部分重量。驱动轮的前置和后置有利有弊,由图可以看到,驱动装置后置呈现出行驶技术上的优势,而前置时大部分履带在行驶时承受大牵引力,容易使履带伸长,在前行时导致前下部履带处形成所谓的“履带腹部”,驱动轮后置时牵引力高区段短,不会出现上述问题。
15.该结构相对于传统结构而言支撑面积更大,越野机动性能更好,但是由于是履带式驱动结构,面对角度较大的楼梯,想要正常实现上楼功能是比较困难的,由于整体重心下坠,很容易引起后翻的情况。
16.目前爬楼机器人的传动结构存在如下问题:1.轮组不能在平地行走时由电机驱动2.通过伸缩切换轮组状态结构过于复杂3.履带结构较为笨重,且美观性欠佳
技术实现要素:
17.本实用新型为解决现有爬楼机器人轮组结构平地和爬楼状态切换难、切换慢的问题,本实用新型对现有技术作出改进,提供了一种可以切换平地驱动和爬楼状态的轮组结构。操作人员通过按键发送前进/爬楼控制指令,传送至前进/爬楼移动模块,实现轮组状态的切换。
18.本实用新型是通过以下技术方案来实现的:
19.本实用新型公开了一种可以切换平地驱动和爬楼状态的轮组结构,包括三星轮组、连接三星轮组的传动轴、与传动轴通过齿轮组连接的步进电机、与步进电机相连的步进电机驱动器、与步进电机驱动器连接的单片机,三星轮组包括三个轮子和设置三个轮子于同一水平面的里三角片和外三角片,传动轴包括传动轴 a和传动轴b,传动轴a通过齿轮组a与两端三星轮组的外三角片连接,传动轴b 通过齿轮组b与两端三星轮组的里三角片连接。
20.作为进一步地改进,本实用新型所述的传动轴a上设有齿轮、并通过齿轮与步进电机a上设置的齿轮齿接,传动轴b上设有齿轮,通过齿轮与步进电机b上设置的齿轮齿接。
21.作为进一步地改进,本实用新型所述的齿轮组a包括固定于传动轴a上的中心齿
轮,和固定于三个轮子上的1号齿轮,中心齿轮与1号齿轮通过3个2号齿轮齿接,中心齿轮、1号齿轮和2号齿轮位于同一水平面上,水平面位于轮子与外三角片之前。
22.作为进一步地改进,本实用新型所述的中心齿轮位于外三角片的中心,传动轴a依次穿过里三角片中心部分、中心齿轮和外三角片中心部分。
23.作为进一步地改进,本实用新型所述的齿轮组b包括固定于传动轴b两端的3号齿轮和固定于里三角片上的4号齿轮,3号齿轮与4号齿轮齿合并位于同一平面。
24.作为进一步地改进,本实用新型所述的传动轴a通过轴承分别与里三角片、外三角片、4号齿轮、中心齿轮连接,轮子通过轴和轴承连接设置于里三角片和外三角片之间。
25.作为进一步地改进,本实用新型还包括控制面板,传动轴b通过连接件与控制面板相连,步进电机a、步进电机b、步进电机驱动器、单片机均固定于控制面板上。
26.作为进一步地改进,本实用新型所述的控制面板上还固定有天线、gps北斗模块、esp32-cam系列单片机,天线与gps北斗模块相连,gps北斗模块与 esp32-cam系列单片机相连,esp32-cam系列单片机与微信小程序信号相连。
27.作为进一步地改进,本实用新型所述的控制面板固定于立柱上,立柱通过轴承套接于从传动轴a上。
28.作为进一步地改进,本实用新型与步进电机驱动器连接的单片机为stm32f 系列单片机,步进电机驱动器为双路输出drv8825步进电机驱动器,步进电机 a和步进电机b均为mg42l1步进电机,立柱上设有购物篮,轮组结构还包括按键,按键与stm32f系列单片机相连。
29.本实用新型的有益效果如下:
30.本实用新型的机械结构采用齿轮啮合驱动转动的方式,可以实现轮组在爬楼和平地驱动状态的自由切换。减少车体承重,使得电机驱动力在不大的情况下也可以通过齿轮的惯性转动带动车轮的转动实现上楼梯的操作。同时还能切换到电机驱动的平地行走的状态,而现有技术在平地行走时无法通过电机驱动使其向前运行;本实用新型通过齿轮啮合惯性转动的方式更容易带动轮胎转动,既减轻了电机驱动的压力,同时更方便地实现了上楼梯的功能,还能切换到电机驱动的平地行走的状态,不仅实现了电机驱动力上的轻松,更能让整体在爬楼过程中保持稳定的平衡状态,该系统在极大程度上能够节省人力,无论在平地行走还是爬楼的状况下都能保持优秀的稳定性。
31.本实用新型轮组结构的还设有gps定位功能将轮组位置信息实时传送至微信小程序模块中,操作者可以实时看到轮组所处位置;为解放人力且为人们带来便利,机器人的研究制造具有重要意义。
附图说明
32.图1是河北工程大学传动机器人设计结构示意图;
33.图2是传统式爬楼机器人结构示意图;
34.图3是蜘蛛式爬楼机器人结构示意图;
35.图4是履带式爬楼机器人结构示意图;
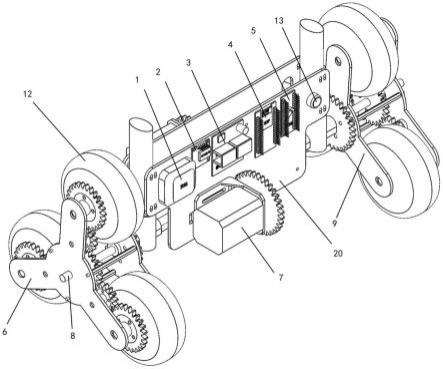
36.图5为本实用新型的结构示意图;
37.图6为本实用新型的正面结构示意图;
38.图7为本实用新型的部分拆解结构示意图a;
39.图8为本实用新型的部分拆解结构示意图b;
40.图9为本实用新型轮组结构的结构示意图。
41.图中,1是天线、2是gps北斗模块、3是步进电机驱动器、4是esp32-cam 系列单片机、5是stm32f系列单片机、6是外三角片、7是步进电机a、8是传动轴a、9是里三角片、10是传动轴b、11是步进电机b、12是轮子、13是按键、 14是中心齿轮、15是1号齿轮、16是2号齿轮、17是3号齿轮、18是4号齿轮,19是三星轮组,20是控制面板。
具体实施方式
42.下面结合说明书附图,通过具体实施例对本实用新型的技术方案作进一步地说明:
43.本实用新型公开了一种可以切换平地驱动和爬楼状态的轮组结构,图5为本实用新型的结构示意图,图6为本实用新型的正面结构示意图,图7为本实用新型的部分拆解结构示意图a,图8为本实用新型的部分拆解结构示意图b;轮组结构包括三星轮组19、连接三星轮组19的传动轴、与传动轴通过齿轮组连接的步进电机、与步进电机相连的步进电机驱动器3、与步进电机驱动器3连接的单片机,三星轮组19包括三个轮子12和设置三个轮子12于同一水平面的里三角片9和外三角片6,传动轴包括传动轴a和传动轴b,传动轴a通过齿轮组a与两端三星轮组19的外三角片6连接,传动轴b通过齿轮组b与两端三星轮组19 的里三角片9连接。
44.图9为本实用新型轮组结构的结构示意图,传动轴a上设有齿轮、并通过齿轮与步进电机a7上设置的齿轮齿接,传动轴b上设有齿轮,通过齿轮与步进电机b11上设置的齿轮齿接。齿轮组a包括固定于传动轴a上的中心齿轮14,和固定于三个轮子12上的1号齿轮15,中心齿轮14与1号齿轮15通过3个2号齿轮16齿接,中心齿轮14、1号齿轮15和2号齿轮16位于同一水平面上,水平面位于轮子12与外三角片6之前。中心齿轮14位于外三角片6的中心,传动轴 a依次穿过里三角片9中心部分、中心齿轮14和外三角片6中心部分。齿轮组b 包括固定于传动轴b两端的3号齿轮17和固定于里三角片9上的4号齿轮18, 3号齿轮17与4号齿轮18齿合并位于同一平面。传动轴a通过轴承分别与里三角片9、外三角片6、4号齿轮18、中心齿轮14连接,轮子12通过轴和轴承连接设置于里三角片9和外三角片6之间。传动轴b通过连接件与控制面板20相连,步进电机a7、步进电机b11、步进电机驱动器3、单片机均固定于控制面板 20上,控制面板20上还固定有天线1、gps北斗模块2、esp32-cam系列单片机4,天线1与gps北斗模块2相连,gps北斗模块2与esp32-cam系列单片机4相连,esp32-cam系列单片机4与微信小程序信号相连,控制面板20固定于立柱上,立柱通过轴承套接于从传动轴a上。与步进电机驱动器3连接的单片机为stm32f系列单片机5,步进电机驱动器3为双路输出drv8825步进电机驱动器3,步进电机a7和步进电机b11均为mg42l1步进电机,立柱上设有购物篮,轮组结构还包括按键13,按键13与stm32f系列单片机5相连。
45.本实用新型专利公开了一种可以切换平地驱动和爬楼状态的轮组结构,包括前进移动模块,爬楼模块、wifi定位模块,微信小程序模块。在前进移动模块中,操作者通过按键13发送指令至stm32f系列单片机5来控制双路输出 drv8825步进电机驱动器3,进而发送控制mg42l1步进电机a7转动通过传动轴a来控制前进驱动三星轮组19;在爬楼模块中,操作者
通过按键13发送指令至stm32f系列单片机5来控制双路输出drv8825步进电机驱动器3,进而发送控制mg42l1步进电机b11转动通过传动轴b来控制转动轮组;在wifi定位模块中,gps北斗模块2获取地址信息,经相连的esp32-cam系列单片机4解码后,将信息无线传输至微信小程序模块;微信小程序模块上可实时查看轮组所在地理位置。
46.使用流程如下:
47.当为前进模式时,按键13向stm32f系列单片机55发送指令,stm32f 系列单片机5与双路输出drv8825步进电机驱动器3相连,双路输出drv8825 步进电机驱动器3与mg42l1步进电机a7相连,mg42l1步进电机a7通过齿轮组a与传动轴a相连,当stm32f系列单片机5接收到从按键13传输过来的命令后,控制双路输出drv8825步进电机驱动器3,从而驱动mg42l1步进电机a7带动传动轴a转动。传动轴a与中心齿轮14相连,中心齿轮14通过2号齿轮16与固定于轮子12上的1号齿轮15齿接,传动轴a通过连接件固定于控制面板20上,连接件为一个中空孔的带螺钉孔的固定件,传动轴a从该中空孔穿过,可以相对于该连接件转动,传动轴a转动带动三星轮组19的中心齿轮14 转动,从而带动1号齿轮15转动,从而实现轮子12的转动,实现轮组的前进。
48.当切换为爬楼模式,按下按键13,案件与stm32f系列单片机5相连,按键1313向stm32f系列单片机5发送指令。stm32f系列单片机5与双路输出 drv8825步进电机驱动器3相连,双路输出drv8825步进电机驱动器3与 mg42l1步进电机b11相连,mg42l1步进电机b11与传动轴b相连,当stm32f 系列单片机5接收到从按键13传输过来的命令后,控制双路输出drv8825步进电机驱动器3,从而驱动mg42l1步进电机b11带动传动轴b转动。传动轴b与固定于里三角片9上的4号齿轮18相连,传动轴b带动固定于其两端的3号齿轮17转动,带动4号齿轮18转动,从而带动里三角片9转动,实现三星轮组 19的整体转动,方便翻过障碍物实现轮组的爬楼。
49.更进一步地,天线1与gps北斗模块2相连,gps北斗模块2与esp32-cam 系列单片机4相连,gps北斗模块2从相连的天线1获取地址信息,传输至 esp32-cam系列单片机4进行地址信息解码并向微信小程序模块发送地址信息,实现轮组的定位。该结构利用两根传动轴,最终实现只以两个电机驱动双三角轮,同时实现自动爬楼和平地驱动的自动化功能,能够在爬楼与平地驱动状态间自由切换,且十分美观。
50.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域中的普通技术人员来说,在不脱离本实用新型核心技术特征的前提下,还可以做出若干改进的润饰,这些改进和润饰也应该视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。