1.本公开涉及晶圆检查方法。更具体地,本公开涉及检查晶圆的侧表面和形成在晶圆上的层的侧表面之间距离的晶圆检查方法。
背景技术:
2.半导体设备可通过重复执行一系列制造过程在诸如硅晶圆的衬底上形成。例如,可执行沉积过程以在晶圆上形成层,可执行光刻过程以在该层上形成光刻胶图案,可执行蚀刻过程以通过使用光刻胶图案作为蚀刻掩模对晶圆上形成的层进行图案化,以及可执行平面化过程以使晶圆上形成的层平面化。
3.光刻过程可以包括在晶圆上形成光阻层的涂层过程,以及对光阻层进行图案化的曝光过程和显影过程,以便形成光刻胶图案。同时,光阻层的边缘部分可以通过边缘珠去除(ebr)过程或晶圆边缘曝光(eew)过程去除,以减少后续过程中的颗粒生成。
4.进一步地,可以额外地对通过移除光阻层的边缘部分而露出的晶圆的边缘区域(以下称为“ebr区域”)执行检查过程。具体而言,用于在ebr区域上执行检查过程的装置可以将光照射到ebr区域上,检测从ebr区域反射的光,并通过分析所检测的光计算ebr区域的宽度。此外,ebr检查装置可以旋转晶圆,并且可以在旋转晶圆的同时重复测量ebr区域的宽度。
5.然而,为了执行如上所述的ebr检查过程,ebr检查装置需要与执行ebr过程的装置分开。因此,可能需要相当多的时间和成本来将晶圆传送到ebr检查装置并使用ebr检查装置执行ebr检查过程。
技术实现要素:
6.本发明的实施例提供了一种能够减少检查晶圆的时间和成本并提高检查结果的可靠性的晶圆检查方法。
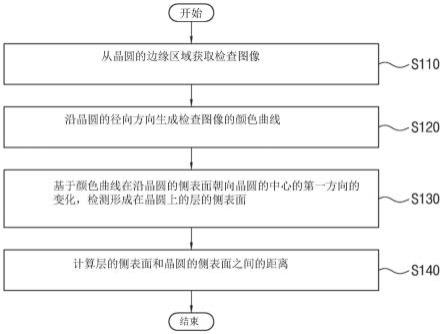
7.根据本发明的方面,一种晶圆检测方法可以包括从晶圆的边缘区域获取检查图像,沿晶圆的径向方向生成检查图像的颜色曲线,以及基于颜色曲线沿从晶圆的侧表面朝向晶圆的中心的第一方向的变化,检测形成在晶圆上的层的侧表面。
8.根据本发明的一些实施例,获取检查图像可以包括通过对晶圆成像获取晶圆的彩色图像,从彩色图像中提取对应于晶圆的边缘区域的环形的第一图像,将第一图像转换为带状的第二图像,以及提取第二图像的一部分以获取检查图像。
9.根据本发明的一些实施例,颜色曲线可以包括构成检查图像的颜色水平值和灰度水平值。
10.根据本发明的一些实施例,颜色曲线可以包括从颜色水平值中计算出的颜色比例值。
11.根据本发明的一些实施例,生成颜色曲线可以包括检测构成检查图像的像素的红色水平值、绿色水平值、蓝色水平值和灰度水平值,计算沿垂直于第一方向的第二方向的红
色水平值、绿色水平值、蓝色水平值和灰度水平值的水平平均值,以及使用水平平均值生成检查图像沿第一方向的颜色水平曲线和灰度水平曲线。
12.根据本发明的一些实施例,生成颜色曲线可以进一步包括使用检查图像的颜色水平曲线生成检查图像的颜色比率曲线。
13.根据本发明的一些实施例,检测该层的侧表面可以包括根据该层的颜色从红色、绿色和蓝色中选择一种颜色,以及从沿第一方向的颜色比例曲线中搜索与所选颜色相对应的颜色比例曲线,以检测具有所选颜色的预定颜色比例的像素。
14.根据本发明的一些实施例,检测层的侧表面可以进一步包括从所检测的像素沿第一方向搜索颜色比例曲线,以在所检测的像素的所选颜色的颜色水平值或所检测的像素的灰度水平值低于预定值时检测具有所选颜色的预定颜色比例的第二像素。
15.根据本发明的一些实施例,对于所选颜色的颜色水平值或灰度水平值低于预定值的像素,可以跳过沿第一方向的搜索。
16.根据本发明的一些实施例,当拐点存在于高于或低于颜色比例曲线中的预定颜色比例的部分时,可通过从拐点沿第一方向搜索颜色比例曲线来检测具有预定颜色比例的像素。
17.根据本发明的一些实施例,晶圆检测方法可以进一步包括计算层的侧表面和晶圆的侧表面之间的距离。
18.根据本发明的另一个方面,一种晶圆检测方法可以包括通过对晶圆成像来获取晶圆的彩色图像,从彩色图像中提取对应于晶圆的边缘区域的一部分的检查图像,沿晶圆的径向方向生成检查图像的颜色比例曲线。基于颜色比例曲线中的一个沿第一方向从晶圆的侧表面朝向晶圆的中心的变化,检测晶圆上形成的层的侧表面,以及计算层的侧表面和晶圆的侧表面之间的距离。
19.根据本发明的一些实施例,提取检查图像可以包括从彩色图像中提取对应于晶圆的边缘区域的环形的第一图像,将第一图像转换为带状的第二图像,以及提取第二图像的一部分以获得检查图像。
20.根据本发明的一些实施例,生成颜色比例曲线可以包括检测构成检查图像的像素的红色水平值、绿色水平值和蓝色水平值,计算沿垂直于第一方向的第二方向的红色水平值、绿色水平值和蓝色水平值的水平平均值。使用水平平均值生成沿第一方向的检查图像的红色水平曲线、绿色水平曲线和蓝色水平曲线,并使用水平平均值生成沿第一方向的检查图像的红色比例曲线、绿色比例曲线和蓝色比例曲线。
21.根据本发明的一些实施例,检测该层的侧表面可以包括根据该层的颜色从红色、绿色和蓝色中选择一种颜色,以及从沿第一方向的颜色比例曲线中搜索与所选颜色对应的颜色比例曲线,以检测具有所选颜色的预定颜色比例的像素。
22.根据本发明的一些实施例,晶圆检测方法可进一步包括生成沿晶圆的径向方向的检查图像的灰度水平曲线。
23.根据本发明的一些实施例,生成灰度水平曲线可以包括检测构成检查图像的像素的灰度水平值,计算沿垂直于第一方向的第二方向的灰度水平值的水平平均值,以及使用水平平均值生成沿第一方向的检查图像的灰度水平曲线。
24.根据本发明的一些实施例,检测层的侧表面可以进一步包括从所检测的像素沿第
一方向搜索颜色比例曲线,以在所检测的像素的灰度水平值低于预定值时检测具有所选颜色的预定颜色比例的第二像素。
25.根据本发明的一些实施例,对于灰度水平值低于预定值的像素,可以跳过沿第一方向的搜索。
26.根据本发明的另一个方面,一种晶圆检查方法可以包括通过对晶圆成像来获取晶圆的彩色图像,从彩色图像中提取对应于晶圆的边缘区域的环形的第一图像,将第一图像转换为带状的第二图像,提取第二图像的一部分以获取检查图像。沿与从晶圆的侧面向晶圆的中心的第一方向垂直的第二方向合并检查图像的像素以获取具有沿第一方向延伸的线状的第二检查图像,生成沿第一方向的第二检查图像的颜色曲线,以及基于沿第一方向的颜色曲线的变化检测晶圆上形成的层的侧表面。
27.上述对本发明的概述并不旨在描述每个说明性的实施例或本发明的每种实施方式。下文的详细描述和权利要求书更具体地例举了这些实施例。
附图说明
28.本发明的实施例可以从以下结合附图的描述中更详细地理解,其中:
29.图1是说明根据本发明的实施例的晶圆检查方法的流程图;
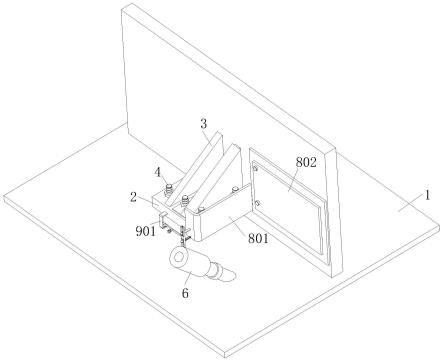
30.图2是说明适合于执行图1所示的晶圆检查方法的晶圆检查装置的示意图;
31.图3是说明如图2所示的晶圆的示意图;
32.图4是由图1所示的图像处理单元获取的检查图像的示例;
33.图5是说明从如图4所示的检查图像中生成的颜色水平曲线和灰度水平曲线的图;
34.图6是说明从如图5所示的颜色水平曲线生成的颜色比例曲线的图;
35.图7是通过如图1所示的图像过程获取的检查图像的另一个示例;
36.图8是说明从如图7所示的检查图像生成的颜色水平曲线和灰度水平曲线的图;以及
37.图9是说明从如图8所示的颜色水平曲线生成的颜色比例曲线的图。
38.虽然各种实施例可进行各种修改和替代形式,但其具体细节已在附图中以示例方式示出,并将进行详细描述。然而,应当理解的是,本发明的意图不是将所要求的发明限制在所描述的特定实施例中。相反,其意图是涵盖所有属于权利要求书所限定的主题的精神和范围内的修改、等同物和替代物。
具体实施方式
39.下面,参照附图更详细地描述本发明的实施例。然而,本发明并不限于下面描述的实施例,而是以各种其他形式实施。提供下面的实施例不是为了完全完成本发明,而是为了向本领域的技术人员充分传达本发明的范围。
40.在说明书中,当一个组件被称为在另一个组件或层上或与之相连时,它可以直接在另一个组件或层上或与之相连,或者也可以存在一个中间组件或层。与此不同的是,当一个组件被称为直接在另一个组件或层上或直接连接到另一个组件或层时,它意味着没有中间组件存在。另外,尽管像第一、第二和第三这样的术语被用来描述本发明各实施例中的各种区域和层,但这些区域和层并不限于这些术语。
41.下面使用的术语仅用于描述具体的实施例,但不限制本发明。此外,除非这里另有定义,所有术语包括技术或科学术语,都可以具有本领域技术人员普遍理解的相同含义。
42.本发明的实施例是参照理想实施例的示意图来描述的。因此,制造方法的变化和/或允许的误差可能会从附图的形式中预期。因此,本发明的实施例的描述不限于图中的具体形式或区域,并包括形式的偏差。这些区域可能完全是示意性的,并且它们的形式可能没有描述或描绘出任何给定区域的准确形式或结构,并且不旨在限制本发明的范围。
43.图1是说明根据本发明的实施例的晶圆检查方法的流程图,图2是说明适合执行图1所示的晶圆检查方法的晶圆检查装置的示意图,以及图3是说明图2所示的晶圆的示意图。
44.参照图1和图2,根据本发明的实施例的晶圆检查方法可用于检查半导体设备的制造过程中的晶圆10。具体地,该晶圆检查方法可用于检查晶圆10的边缘区域(即在移除形成在晶圆10上的光阻层20的边缘部分之后的ebr区域12)的宽度。
45.用于执行晶圆检查方法的晶圆检查装置100可以被设置在用于去除光阻层20的边缘部分的ebr过程模块220和用于传送晶圆10的晶圆传送模块210之间。即,晶圆检查装置100可以被设置在用于执行ebr过程的ebr过程装置200中。晶圆传送模块210可以包括装载口212,在该装载口上放置用于容纳晶圆10的盒体50,以及晶圆传送机器人214,其用于在盒体50和ebr过程模块220之间传送晶圆10,并且晶圆检查装置100可以通过对由晶圆传送机器人214传送的晶圆10进行成像来获取晶圆10的彩色图像。
46.具体而言,在由ebr过程模块220执行ebr过程之后,晶圆10可以由晶圆传送机器人214传送到盒体50中,并且晶圆检查装置100可以对由晶圆传送机器人214传送的晶圆10进行成像。例如,晶圆传送机器人214可以包括用于传送晶圆10的机械臂216,并且晶圆检查装置100可以包括设置在晶圆10的传送路径上方并被配置为对晶圆10进行成像的相机单元110。
47.可以使用线扫描相机作为相机单元110,并且可以在线扫描相机110的一侧上设置用于向晶圆10提供照明光的照明单元112。此外,晶圆检查装置100可以包括控制相机单元110和照明单元112的操作的控制单元120。控制单元120可以根据晶圆传送机器人214的操作来操作照明单元112,并且可以控制相机单元110的操作,以便相机单元110在照明单元112被操作后的预定时间内捕获晶圆10的传送路径。
48.例如,ebr过程装置200可以生成与晶圆传送机器人214的操作有关的事件日志文件,并且控制单元120可以基于事件日志文件操作照明单元112。具体而言,ebr过程装置200可以生成记录由晶圆传送机器人214开始传送晶圆10的时间的事件日志文件,并且控制单元120可以基于事件日志文件中记录的晶圆10的传送开始时间打开照明单元112。进一步地,控制单元120可以控制相机单元110的操作,以便在照明单元112被打开后对晶圆10的传送路径进行成像,从而获取晶圆10的彩色图像。
49.根据本发明的实施例,晶圆检查装置100可以包括图像处理单元130,用于处理由相机单元110获取的晶圆10的彩色图像。图像处理单元130可以从晶圆10的彩色图像中提取对应于晶圆10的边缘区域的环形的第一图像,并且可以将第一图像转换成带状的第二图像。例如,第一图像可以具有环形的形状,而第二图像可以具有带状的形状,其沿从晶圆10的侧表面朝向晶圆10的中心的第一方向具有预定的宽度,并沿与第一方向垂直的第二方向延伸。
50.进一步地,图像处理单元130可以提取第二图像的一部分以获取检查图像30(参考图4)。具体地,图像处理单元130可以从第二图像中提取多个检查图像30以检查ebr区域12的宽度。例如,检查图像30可以包括沿第一方向的300个像素,并且可以包括沿第二方向的100个像素。即,检查图像30可以具有300
×
100的尺寸。作为另一示例,检查图像30可以具有包括沿第一方向的300个像素的线状。
51.图4是由如图1所示的图像处理单元获取的检查图像的示例,图5是说明从如图4所示的检查图像生成的颜色水平曲线和灰度水平曲线的图,以及图6是说明从如图5所示的颜色水平曲线生成的颜色比例曲线的图。图7是由图1所示的图像处理单元获取的检查图像的另一示例,图8是说明从图7所示的检查图像中生成的颜色水平曲线和灰度水平曲线的图表,以及图9是说明从图8所示的颜色水平曲线生成的颜色比例曲线的图。
52.参照图4至图9,图像处理单元130可以生成检查图像30的颜色曲线,以检测光阻层20的侧表面。根据本发明的实施例,图像处理单元130可以检测构成检查图像30的像素的颜色水平值和灰度水平值,并且可以从颜色水平值和灰度水平值生成检查图像30的颜色水平曲线和灰度水平曲线。此外,图像处理单元130可以从颜色水平值计算出颜色比例值,并可以从颜色比例值生成颜色比例曲线。
53.例如,图像处理单元130可以检测构成检查图像30的像素的红色水平值、绿色水平值、蓝色水平值和灰度水平值,并且可以计算沿第二方向的红色水平值、绿色水平值、蓝色水平值和灰度水平值的水平平均值。
54.图像处理单元130可以通过使用水平平均值来生成沿第一方向的检查图像30的红色水平曲线、绿色水平曲线、蓝色水平曲线和灰度水平曲线。进一步地,图像处理单元130可以从颜色水平平均值,即红色水平平均值、绿色水平平均值和蓝色水平平均值计算出红色比例值、绿色比例值和蓝色比例值,并且可以从红色比例值、绿色比例值和蓝色比例值生成红色比例曲线、绿色比例曲线和蓝色比例曲线。
55.作为另一示例,图像处理单元130可以通过合并构成检查图像30的第二方向上的像素来生成具有线状的第二检查图像(未示出)。即,可以从具有300
×
100尺寸的检查图像30生成具有300
×
1尺寸的第二检查图像,并且可以从第二检查图像生成颜色水平曲线、灰度水平曲线和颜色比例曲线。
56.控制单元120可以基于颜色曲线的变化检测形成在晶圆10上的层20的侧表面,即光阻层20。例如,控制单元120可以根据层20的颜色从红、绿和蓝中选择一种颜色,并且可以沿第一方向从颜色比例曲线中搜索与所选颜色相对应的颜色比例曲线,以检测具有所选颜色的预定颜色比例的像素。在这种情况下,形成在晶圆10上的层20的颜色可以由构成层20的材料决定。
57.例如,在光阻层20的情况下,红色水平可能相对高于绿色水平和蓝色水平,并且因此控制单元120可以从红色、绿色和蓝色中选择红色。在这种情况下,控制单元120可以通过沿第一方向搜索红色比例曲线来检测具有预定红色比例的像素,并且所检测的像素可以是光阻层20的侧表面。此外,控制单元120可以计算出光阻层20的侧表面与晶圆10的侧表面之间的距离,即ebr区域12的宽度。
58.同时,与晶圆10上的光阻层20相比,检查图像30的ebr区域12的颜色水平值可能相对较低。相应地,即使当所检测的像素的红色比率值等于或高于预定的红色比率值时,当所
检测的像素的红色水平值低于预定的水平值时,控制单元120可以确定所检测的像素不是光阻层20的侧表面。即,具有颜色水平值低于预定水平值的像素可以包括在ebr区域12中,因此,即使检测到具有红色比例值等于或高于预定比例值的像素,优选能确定所检测的像素不是光阻层20的侧表面。
59.进一步,检查图像30的ebr区域12与晶圆10上的光阻层20相比可能显得相对较暗。相应地,当所检测的像素的灰度水平值低于预定的水平值时,控制单元120可以确定所检测的像素不是光阻层20的侧表面。例如,当所检测的像素的红色水平值和灰度水平值高于预定水平值,并且所检测的像素的红色比例值等于或高于预定比例值时,控制单元120可以确定所检测的像素是光阻层20的侧表面。
60.参照图5和图6,可以在ebr区域12中检测具有高于预定比例值的红色比例值的像素。然而,在这种情况下,所检测的像素的红色水平值和灰度水平值可能低于预定的水平值,例如100,因此,控制单元120可以确定所检测的像素不是光阻层20的侧表面。
61.参照图8和图9,当检测到具有红色比例值高于预定比例值的像素,然后检测到具有红色比例值低于预设比例值的像素时,控制单元120可以确定检测到的像素包括在ebr区域12中。根据本发明的实施例,当具有高于或等于预设比例值的红色比例值的像素被连续检测到预定数量时,控制单元120可以确定连续检测的像素是光阻层20。此外,控制单元120可以确定连续检测的像素中的第一像素是光阻层20的侧表面。
62.根据本发明的实施例,如图9所示,当红色比例曲线具有多个拐点时,控制单元120可以通过从高于预定比例值的拐点或低于预定比例值的拐点沿第一方向搜索红色比例曲线来检测具有预定比例值的像素。例如,当在红色水平值高于预定水平值(例如100)的部分存在高于或低于预定比例值的拐点时,控制单元120可以通过从拐点沿第一方向搜索红色比例曲线来检测具有预定比例值的像素。
63.下面,将参照附图描述根据本发明实施例的晶圆检查方法。
64.参照图1,在步骤s110中,可以从晶圆10的边缘区域获取检查图像30。具体地,尽管未在图中示出,但步骤s110可包括通过对晶圆10成像来获取晶圆10的彩色图像,从彩色图像中提取具有对应于晶圆10的边缘区域的基本圆的环形的第一图像(未示出),将第一图像转换为具有沿第二方向延伸的带状形状的第二图像(未示出),并且通过提取第二图像的一部分来获取沿第一方向延伸的检查图像30。虽然在图中没有示出,但可以从第二图像中提取多个检查图像30,以便检查ebr区域12的宽度。作为示例,检查图像30可以从第二图像中提取,以具有约300
×
100的尺寸。
65.同时,在晶圆10被晶圆传送机器人214传送的同时,彩色图像可由相机单元110获取,并且检查图像30可由图像处理单元130获取。
66.在步骤s120中,可以沿晶圆10的径向方向生成检查图像30的颜色曲线。例如,尽管未示出,但步骤s120可以包括,检测构成检查图像30的像素的红色水平值、绿色水平值、蓝色水平值和灰度水平值,计算沿第二方向的红色水平值、绿色水平值、蓝色水平值和灰度水平值的水平平均值,使用水平平均值生成检查图像30沿第一方向的颜色水平曲线和灰度水平曲线,并且使用颜色水平曲线生成检查图像30的颜色比例曲线。
67.步骤s120可以由图像处理单元130执行。图像处理单元130可以生成检查图像30的红色水平曲线、绿色水平曲线、蓝色水平曲线、灰度水平曲线、红色比例曲线、绿色比例曲线
和蓝色比例曲线。
68.作为另一示例,图像处理单元130可以通过沿第二方向合并检查图像30的像素来生成线状的第二检查图像。即,图像处理单元130可以从检查图像30生成具有300
×
1尺寸的第二检查图像,并且可以从第二检查图像生成颜色水平曲线、灰度水平曲线和颜色比例曲线。
69.再次参考图1,在步骤s130中,可以基于沿第一方向的颜色曲线的变化来检测形成在晶圆10上的层(例如,光阻层20)的a侧表面。具体地,虽然没有示出,但步骤s130可包括根据层20的颜色从红色、绿色和蓝色中选择一种颜色,并通过从沿第一方向的颜色比例曲线中搜索与所选颜色对应的颜色比例曲线来检测具有预定颜色比例的像素。
70.例如,控制单元120可以从红色、绿色和蓝色中选择红色,并通过沿第一方向搜索红色比例曲线来检测具有预定的红色比例的像素。
71.特别是,当检测到的像素的红色水平值或灰度水平值低于预定的水平值时,控制单元120可以确定所检测的像素不是光阻层20的侧表面,并且可以通过从所检测的像素沿第一方向搜索红色比例曲线来检测具有预定红色比例的第二像素。
72.作为另一示例,控制单元120可以跳过对具有红色水平值或灰度水平值低于预定水平值的像素沿第一方向的搜索。具体地,红色水平值或灰度水平值低于预定值的像素可能属于ebr区域12,因此,控制单元120可以跳过对红色水平值或灰度水平值低于预定值的部分的搜索。进一步地,当红色比例曲线在红色水平值高于预定水平值(例如100)的部分中具有高于或低于预定比例值的拐点时,控制单元120可以通过从拐点沿第一方向搜索红色比例曲线来检测具有预定比例值的像素。如上所述,通过跳过所选颜色的水平值或灰度水平值低于预定水平值的部分的搜索或在拐点之后开始搜索,可以减少检测光阻层20的侧表面所需的时间。
73.在如上所述检测光阻层20的侧面后,在步骤s140中,控制单元120可以计算光阻层20的侧表面与晶圆10的侧表面之间的距离,并且可以根据计算的距离确定是否正常执行ebr过程。
74.特别是,如上所述的检查步骤可以在多个检查图像30上重复地执行。在这种情况下,ebr区域12的颜色曲线在每个检查图像30中可能是不同的,因此,检查图像30的检查配方可以被不同地设定。例如,可以根据检查图像30的颜色比例曲线改变从每个检查图像30中选择的颜色,并且可以改变所选颜色的颜色比例参考值。此外,可以为每个检查图像30不同地设定用于跳过搜索的颜色水平值和灰度水平值。如上所述,可以为每个检查图像30设定不同的检查配方,并且检查图像30和检查配方可以存储在数据存储设备中。
75.检查图像30可以在晶圆的后续检查过程中被用作参考图像。例如,在随后的检查过程中从晶圆获取检查图像之后,控制单元120可以将检查图像与参考图像进行比较,并且可以从参考图像中选择具有最高图像匹配率的参考图像。然后,控制单元120可以通过使用与所选参考图像相对应的检查配方来对检查图像执行检查步骤。
76.根据如上所述的本发明的实施例,在执行ebr过程之后,可以使用在传送晶圆10时获取的晶圆10的彩色图像来执行检查过程。因此,与现有技术相比,不需要单独的检查设备,检查时间和成本可大大降低。特别是,用于检测形成在晶圆10上的层20的侧表面的颜色可以根据层20的颜色比例来选择,从而显著提高检查过程的可靠性。
77.尽管本发明的示例性实施例已经参照具体实施例进行了描述,但它们并不限于此。因此,本领域的技术人员将很容易理解,在不脱离所附权利要求的精神和范围的情况下,可以对其进行各种修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。