技术特征:
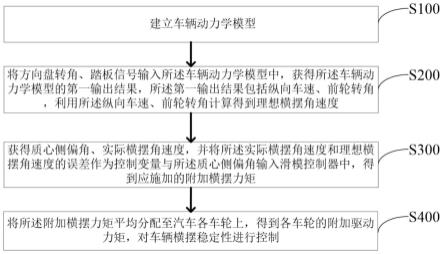
1.一种电动汽车横摆稳定性控制方法,其特征在于,所述方法包括:建立车辆动力学模型;将方向盘转角、踏板信号输入所述车辆动力学模型中,获得所述车辆动力学模型的第一输出结果,所述第一输出结果包括纵向车速、前轮转角,利用所述纵向车速、前轮转角计算得到理想横摆角速度;获得质心侧偏角、实际横摆角速度,并将所述实际横摆角速度和理想横摆角速度的误差作为控制变量与所述质心侧偏角输入滑模控制器中,得到应施加的附加横摆力矩;将所述附加横摆力矩平均分配至汽车各车轮上,得到各车轮的附加驱动力矩,对车辆横摆稳定性进行控制。2.根据权利要求1所述的方法,其特征在于,所述获得质心侧偏角、实际横摆角速度,包括:获得所述车辆动力学模型的第二输出结果,所述第二输出结果包括方向盘转角、纵向加速度、横向加速度;根据所述方向盘转角、纵向加速度、横向加速度通过卡尔曼滤波器进行车辆状态参数计算,获得所述质心侧偏角、实际横摆角速度。3.根据权利要求2所述的方法,其特征在于,所述利用所述纵向车速、前轮转角计算得到理想横摆角速度,包括:建立简化二自由度车辆模型;根据所述简化二自由度车辆模型,获得车辆二自由度参考模型的动力学微分方程,其中,所述动力学微分方程包括前轮侧向力的合力、后轮侧向力的合力;根据前轮侧向力的合力、后轮侧向力的合力与前后轮侧偏角的计算关系,将前轮侧偏角、后轮侧偏角的关系表达式代入所述动力学微分方程中进行公式转化,获得质心侧偏角公式、横摆角速度公式;获得车辆进入稳态时理想横摆角速度、理想质心侧偏角的设定要求,并将所述理想横摆角速度、理想质心侧偏角的设定要求代入所述质心侧偏角公式、横摆角速度公式中进行修正;基于修正后得到的理想横摆角速度公式,根据所述纵向车速、前轮转角计算得出所述理想横摆角速度。4.根据权利要求1所述的方法,其特征在于,将质心侧偏角计算公式代入所述动力学微分方程,整理获得横摆角速度公式、质心侧偏角公式为:当车辆进入稳态时,设理想横摆角速度为ω
r_d
、理想质心侧偏角为β
d
,代入所述横摆角速度公式、质心侧偏角公式中,获得理想横摆角速度、理想质心侧偏角表达式:
获得车辆稳定性因数、横摆角速度极限值、质心侧偏角极限值表达式,将所述理想横摆角速度、理想质心侧偏角表达式修正为:角速度、理想质心侧偏角表达式修正为:其中,a为质心到前轴距离,b为质心到后轴距离,l为前后轴距离,m为整车质量,g为重力加速度,v
x
为纵向车速,c
f
为前轮曲线因子,c
r
为后轮曲线因子,δ
f
为前轮转角,ω
r_d
为理想横摆角速度、β
d
为理想质心侧偏角、μ为路面附着系数、β
max
为最大质心侧偏角、ω
rmax
为最大横摆角速度、k为车辆稳定性因数。5.根据权利要求4所述的方法,其特征在于,所述理想横摆角速度ω
r_d
与理想质心侧偏角β
d
存在耦合关系:6.根据权利要求1所述的方法,其特征在于,所述方法还包括:根据所述实际横摆角速度和理想横摆角速度计算得到误差e=ω
r-ω
r_d
,其中,ω
r
为实际横摆角速度、ω
r_d
为理想横摆角速度;将所述误差作为控制变量,基于所述横摆角速度公式、质心侧偏角公式,得到车辆二自由度动力学模型表达式为:其中,δm为施加给车辆的附加横摆力矩;定义滑模面s=e=ω
r-ω
r_d
,趋近律为等速趋近律得到附加横摆力矩公式为:7.根据权利要求1所述的方法,其特征在于,所述方法还包括:汽车车轮数为4,将所述附加横摆力矩δm平均分配到4个车轮上,得到4个车轮的附加驱动力矩,其中,转向内侧车轮为正驱动力矩其力矩大小为转向外侧车轮为负驱动力矩其力矩大小为根据所述4个车轮的附加驱动力矩,获得总轮毂电机转矩,并将所述总轮毂电机转矩输入所述车辆动力学模型的输入接口中。
8.一种电动汽车横摆稳定性控制装置,其特征在于,所述装置包括:第一构建单元,所述第一构建单元用于建立车辆动力学模型;第一处理单元,所述第一处理单元用于将方向盘转角、踏板信号输入所述车辆动力学模型中,获得所述车辆动力学模型的第一输出结果,所述第一输出结果包括纵向车速、前轮转角,利用所述纵向车速、前轮转角计算得到理想横摆角速度;第二处理单元,所述第二处理单元用于获得质心侧偏角、实际横摆角速度,并将所述实际横摆角速度和理想横摆角速度的误差作为控制变量与所述质心侧偏角输入滑模控制器中,得到应施加的附加横摆力矩;第一执行单元,所述第一执行单元用于将所述附加横摆力矩平均分配至汽车各车轮上,得到各车轮的附加驱动力矩,对车辆横摆稳定性进行控制。9.一种电动汽车横摆稳定性控制装置,其特征在于,包括:处理器,所述处理器与存储器耦合,所述存储器用于存储程序,当所述程序被所述处理器执行时,使装置以执行如权利要求1至7任一项所述方法的步骤。10.一种计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述方法的步骤。
技术总结
本发明提供了一种电动汽车横摆稳定性控制方法及装置,其中,该方法包括:建立车辆动力学模型;将方向盘转角、踏板信号输入车辆动力学模型中,获得车辆动力学模型的第一输出结果,第一输出结果包括纵向车速、前轮转角,利用纵向车速、前轮转角计算得到理想横摆角速度;获得质心侧偏角、实际横摆角速度,并将实际横摆角速度和理想横摆角速度的误差作为控制变量与质心侧偏角输入滑模控制器中,得到应施加的附加横摆力矩;将附加横摆力矩平均分配至汽车各车轮上,得到各车轮的附加驱动力矩,对车辆横摆稳定性进行控制。辆横摆稳定性进行控制。辆横摆稳定性进行控制。
技术研发人员:薛雪 梁海强 张蓝文
受保护的技术使用者:北京新能源汽车股份有限公司
技术研发日:2022.02.07
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。