1.本发明属于蒸汽发生器传热管及类似设备的无损检测,具体涉及一种爬行定位机器人结构。
背景技术:
2.蒸汽发生器(steam generator,以下简称sg)是核电站中仅次于堆芯压力容器的重型关键设备,也是核电设备运行中发生故障最多的设备之一。sg水室的内表面、主管道接头、隔板、管板以及数以千计的传热管都是sg在役检修、评估的对象,其中又以传热管的在役检修、评估最为复杂。传热管的腐蚀破损将导致一回路放射性介质泄漏至二回路,产生严重的水污染,并危及一回路安全。一旦发生泄漏事故,核电站将被迫紧急停堆,造成重大的经济损失与安全隐患。因此对sg定期进行在役检修、评估是避免非计划停堆的主要手段。
技术实现要素:
3.本发明的目的在于提供一种爬行定位机器人结构,它能够适应蒸汽发生器在役检修的复杂工况,该结构是一种可模块化维护和拆卸的新型机构,其运动方式不受传热管的排列方式和管间距限制,可以显著提高定位装置的定位效率。
4.本发明的技术方案如下:一种爬行定位机器人结构,包括转台、滑台、基座和工具端,所述的转台相对基座之间具有旋转自由度以实现多角度旋转,滑台相对转台和基座之间具有相对平移自由度以实现直线行走,滑台相对转台和基座之间具有相对升降自由度以实现转台脚趾和滑台脚趾的交替升降。
5.所述的滑台的两端分别安装有一个卡爪和驱动器,滑台的下部安装有卡爪限位支架,在滑台的两侧安装了两条导轨,滑台与导轨和滑台同步带轮组固定,基座固定在夹板上。
6.所述的导轨和滑台同步带轮组外部罩有滑台壳体。
7.所述的滑台同步带轮组的主动轮固定于滑台电机的输出轴上,滑台电机固定于滑台一侧,从动通过轴承卡环连接在张紧块上。
8.所述的同步带下方设有第一光电开关。
9.所述的滑台的一端设置工具端,工具端上的卡爪的外壳体由脚趾底座和脚趾顶盖安装固定,脚趾底座上安装有工具端阀岛和第一电磁阀,脚趾顶盖上安装有工具端电机驱动器,上述结构形成了一个工具端脚趾模块,完成模块装配后再将工具端脚趾模块安装在工具端支架上。
10.所述的基座上连出的气管连接到工具端阀岛上装有五个电磁阀。
11.所述的工具端设在滑台的一端,包括不可更换的工具座以及可更换的检修工具。
12.所述的工具座包括工具端支架和旋转头,其自身的旋转运动通过工具电机组和工具同步带轮组驱动,工具同步带轮组的主动轮和从动轮固定于工具电机组输出轴和工具座转轴。
13.所述的旋转头后侧为一个可拆卸后盖,气动快换接头主端安装在快换接头支架上,快换接头支架固定在旋转头下部,摄像头安装在摄像头支架上。
14.所述的结构是一种可模块化维护和拆卸的新型机构,一种滑台结构两端分别装有一个卡爪,滑台与导轨和滑台同步带轮组固定,当滑台电机组带动滑台同步带轮组运动,与夹板固定的基座会和滑台沿导轨产生相对平移运动。
15.所述的定位机器人结构是一种可模块化维护和拆卸结构,滑台电机端与工具端分别安装有驱动器、电磁阀和卡爪安装在一起形成一个模块,安装有驱动器和电磁阀,工具端也是将电磁阀、摄像头和快换接头形成一个模块,转台和基座也是各形成一个模块,上述模块可通过拆除部分电气接头、气管接头及少量紧固件即可分开。
16.本发明的有益效果在于:一种定位机器人结构主要分为四个部分:转台、滑台、基座和工具端。为使定位机器人能够完成连续多角度的交替平移运动,将定位机器人设计为三自由度机构,三个运动自由度分别为:转台相对基座间的旋转自由度以实现多角度旋转,滑台相对转台和基座间的相对平移自由度以实现直线行走,滑台相对转台和基座间的相对升降自由度以实现转台脚趾和滑台脚趾的交替升降。一种滑台结构两端分别装有一个卡爪,滑台与导轨和滑台同步带轮组固定,当滑台电机组带动滑台同步带轮组运动,与夹板固定的基座会和滑台沿导轨产生相对平移运动。滑台电机端与工具端采用模块化设计,安装有驱动器和电磁阀。从工具端连出的气管沿壳体连接到电机端的气管接头,通过电磁阀分别控制定位加紧机构的涨紧、释放和收回动作。维护可实现模块化拆卸。减小维护难度,降低人员在辐射区的工作时间。检修工具机构分为两部分,不可更换的工具座以及可更换的检修工具。工具座由工具端支架和旋转头组成,其自身的旋转运动通过工具电机组和工具同步带轮组驱动。工具座内集成安装了电磁阀和快换接头。
附图说明
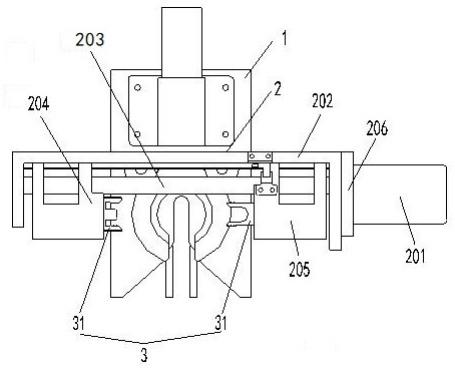
17.图1为本发明所提供的一种爬行定位机器人结构示意图;
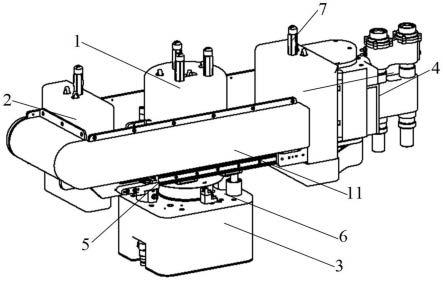
18.图2为滑台同步带侧示图;
19.图3为同步带驱动示意图;
20.图4为滑台驱动器侧示图;
21.图5为工具座示意图;
22.图6为工具座剖视图;
23.图7为检修工具图。
24.图中,1转台,2滑台,3基座,4工具端,5第一光电开关,6第二光电开关,7卡爪,8导轨,9滑台同步带轮组,10夹板,11壳体,12主动轮,13滑台电机,14从动轮,15张紧块,16同步带,17卡爪阀岛,18第一电磁阀,19工具端电机驱动器,20第二电磁阀,21工具端阀岛,22工具座,23检修工具,24工具端支架,25旋转头,26工具电机,27工具同步带轮组,28工具座转轴,29后盖,30气动快换接头,31快换接头支架,32摄像头,33摄像头支架,34第三电磁阀,35气缸,36连接器,37驱动器,38卡爪限位支架,39张紧器。
具体实施方式
25.下面结合附图及具体实施例对本发明作进一步详细说明。
26.本专利提出了一种新型核电站蒸汽发生器管板定位检测机器人结构可解决蒸汽发生器传热管的检修问题。
27.一种爬行定位机器人结构主要分为四个部分:转台1、滑台2、基座3和工具端4。为使定位机器人能够完成连续多角度的交替平移运动,将定位机器人设计为三自由度机构,三个运动自由度分别为:转台1相对基座3之间的旋转自由度以实现多角度旋转,滑台2相对转台1和基座3之间的相对平移自由度以实现直线行走,滑台2相对转台1和基座3之间的相对升降自由度以实现转台脚趾和滑台脚趾的交替升降。
28.作业时,转台和滑台交替进行平移、旋转和升降运动,并依靠各自的卡爪7实现运动定位,为提高机构在运动定位时的定位精度及机构可靠性,在转台上设计有三个卡爪7,滑台的两端分别设计有一个卡爪7。
29.滑台2两端分别装有一个卡爪7,滑台2与导轨8和滑台同步带轮组9固定,当滑台电机组带动滑台同步带轮组运动,与夹板10固定的基座3会和滑台2沿导轨8产生相对平移运动,从而实现平移自由度。滑台壳体11由一主壳体和若干小壳体组成,包括上盖、侧盖、工具座上盖、工具座下盖。为方便实现主体机构电气部件的密封等级要求,滑台同步带轮组和两导轨都固定在壳体外侧,滑台同步带轮组通过侧盖保护。
30.滑台的壳体11仅起到防护作用,将壳体全部拆卸后,即可看到滑台机构的主支架。滑台同步带轮组9的主动轮12固定于滑台电机13的输出轴上,滑台电机13固定于滑台一侧,从动轮14通过轴承卡环连接在张紧块15上,位于滑台的另一端,起到张紧同步带16的作用。滑台光电开关5位于同步带16下方,可通过螺钉调整校准滑台光电开关5的位置,触发杆安装在夹板下侧。由于支撑基座和转台重量的需要,在滑台的两侧安装了两条导轨8。
31.滑台工具端卡爪7的外壳体由脚趾底座和脚趾顶盖安装固定,脚趾底座上安装有工具端阀岛17和电磁阀18,脚趾顶盖上安装有工具端电机驱动器19,上述结构形成了一个工具端脚趾模块,完成模块装配后再将工具端脚趾模块安装在工具端支架24上,这样模块化的结构设计方便了部件模块的拆装更换。
32.气路上,从基座连出的气管连接到工具端阀岛21上装有五个电磁阀,分别控制定位加紧机构的涨紧、释放和收回动作,以及给电机端和检修工具机构供气。为防止弹簧、触发杆等结构夹线,故将阀岛和电磁阀等与弹簧异侧放置,工具电机组倒置安装在工具端支架上,与卡爪的弹簧同侧。
33.滑台电机端与工具端类似,采用模块化设计,也安装有驱动器37和电磁阀20。从工具端连出的气管沿壳体连接到电机端的气管接头,通过电磁阀20分别控制定位加紧机构的涨紧、释放和收回动作。
34.根据定位机器人对检修工具的需求,传热管检修工具需要可以快速更换,通过更换不同的检修工具,实现不同的检修功能,以完成不同需求的检修作业,故可将检修工具机构分为两部分,不可更换的工具座22以及可更换的检修工具23,涡流检测中,检修工具可以实现对两个传热管管孔进行同时检测的探头门工具。
35.工具座22由工具端支架24和旋转头25组成,其自身的旋转运动通过工具电机组26和工具同步带轮组27驱动。
36.工具同步带轮组27的主动轮和从动轮固定于工具电机组输出轴和工具座转轴28,光电开关5通过一安装座固定于工具同步带27旁,触发杆固定于工具同步带轮组的从动轮
上。
37.工具座旋转头25、工具座转轴28上各放置一薄壁轴承可起到减轻两轴负载的作用,工具座旋转头的空心轴可使气管穿入,为旋转头供气。
38.旋转头后侧为一个可拆卸后盖29,可拆卸检修旋转头内部电气部件,气动快换接头30主端安装在快换接头支架31上,快换接头支架31固定在旋转头25下部,摄像头32安装在摄像头支架33上,摄像头支架固定在快换接头支架上方,两个摄像头分别用于定位精度监测和检修工具作业状态监测。快换接头支架还充当了旋转头阀岛,其上安装有四个电磁阀34,分别控制快换接头的涨紧、释放和检修工具机构的上升下降,所有的气管接头都设置在旋转头的上部,方便气管从空心轴穿出。
39.探头工具是具有两个探头导向的机构,探头工具与工具座旋转头的配合面上装有快换接头30从端。两探头门上方为连体腔的气缸35结构,下方为探头软管连接器36。气缸结构可使探头门上升下降,以实现接近和远离蒸发器管板,提高探头定位精度。
40.如图1所示,一种爬行定位机器人结构,包括转台1、滑台2、基座3和工具端4。该机构具有三自由度机构分别为:转台1相对基座3之间的旋转自由度以实现多角度旋转,滑台2相对转台1和基座3之间的相对平移自由度以实现直线行走,滑台2相对转台1和基座3之间的相对升降自由度以实现转台脚趾和滑台脚趾的交替升降。
41.如图2所示,滑台2的两端分别安装有一个卡爪7和驱动器37,滑台2的下部安装有卡爪限位支架38,在滑台2的两侧安装了两条导轨8,用于支撑基座3和转台1。滑台2与导轨8和滑台同步带轮组9固定,当滑台电机组带动滑台同步带轮组运动,夹板10固定滑台同步带轮组9上,基座3固定在夹板10上,与夹板10固定的基座3和滑台2沿导轨8产生相对平移运动,从而实现平移自由度。滑台壳体11罩在导轨8和滑台同步带轮组9外部,滑台壳体11包括一主壳体和若干小壳体,具体包括包括上盖、侧盖、工具座上盖、工具座下盖。为方便实现主体机构电气部件的密封等级要求,滑台同步带轮组和两导轨都固定在壳体外侧,滑台同步带轮组通过侧盖保护。
42.如图2-4所示,滑台同步带轮组9的主动轮12固定于滑台电机13的输出轴上,滑台电机13固定于滑台2一侧,从动轮14通过轴承卡环连接在张紧块15上,位于滑台2的另一端,起到张紧同步带16的作用。第一光电开关5位于同步带16下方,可通过螺钉调整校准第一光电开关5的位置,触发杆安装在夹板下侧。
43.滑台2的一端设置工具端4,工具端4上的卡爪7的外壳体由脚趾底座和脚趾顶盖安装固定,脚趾底座上安装有工具端阀岛17和第一电磁阀18,脚趾顶盖上安装有工具端电机驱动器19,上述结构形成了一个工具端脚趾模块,完成模块装配后再将工具端脚趾模块安装在工具端支架24上,这样模块化的结构设计方便了部件模块的拆装更换。
44.气路上,从基座3连出的气管连接到工具端阀岛21上装有五个电磁阀,分别控制定位加紧机构的涨紧、释放和收回动作,以及给电机端和检修工具机构供气。
45.滑台电机端也采用模块化结构,安装有驱动器37和第二电磁阀20。从工具端连出的气管沿壳体连接到电机端的气管接头,通过第二电磁阀20分别控制定位加紧机构的涨紧、释放和收回动作。
46.工具端4设在滑台的一端,包括不可更换的工具座22以及可更换的检修工具23,涡流检测中,检修工具可以实现对两个传热管管孔进行同时检测的探头门工具。工具座22包
括工具端支架24和旋转头25,其自身的旋转运动通过工具电机组26和工具同步带轮组27驱动。
47.工具同步带轮组27的主动轮和从动轮固定于工具电机组输出轴和工具座转轴28,第一光电开关5通过一安装座固定于工具同步带27旁,触发杆固定于工具同步带轮组的从动轮上。
48.旋转头25后侧为一个可拆卸后盖29,可拆卸检修旋转头内部电气部件,气动快换接头30主端安装在快换接头支架31上,快换接头支架31固定在旋转头25下部,摄像头32安装在摄像头支架33上,摄像头支架固定在快换接头支架上方,两个摄像头分别用于定位精度监测和检修工具作业状态监测。快换接头支架还充当了旋转头阀岛,其上安装有四个第三电磁阀34,分别控制快换接头的涨紧、释放和检修工具机构的上升下降,所有的气管接头都设置在旋转头的上部,方便气管从空心轴穿出。
49.探头工具是具有两个探头导向的机构,探头工具与工具座旋转头的配合面上装有快换接头30从端。两探头门上方为连体腔的气缸35,下方为探头软管连接器36。气缸可使探头门上升下降,以实现接近和远离蒸发器管板,提高探头定位精度。
50.如图1所示,本发明所述定位机器人作业时,转台和滑台交替进行平移、旋转和升降运动,并依靠各自的卡爪7实现运动定位,为提高机构在运动定位时的定位精度及机构可靠性,在转台1上设计有三个卡爪7,滑台2的两端分别设计有一个卡爪7。滑台两端分别装有一个卡爪7,滑台与导轨8和滑台同步带轮组9固定,当滑台电机组带动滑台同步带轮组运动,与夹板10固定的基座3会和滑台2沿导轨8产生相对平移运动,从而实现平移自由度。传热管检修工具需要可以快速更换,通过更换不同的检修工具,实现不同的检修功能,以完成不同需求的检修作业,摄像头32安装在摄像头支架33上,摄像头支架固定在快换接头支架上方,两个摄像头分别用于定位精度监测和检修工具作业状态监测。快换接头支架还充当了旋转头阀岛,其上安装有四个电磁阀34,分别控制快换接头的涨紧、释放和检修工具机构的上升下降。探头工具是具有两个探头导向的机构,探头工具与工具座旋转头的配合面上装有快换接头30从端。两探头门上方为连体腔的气缸35结构,下方为探头软管连接器36。气缸结构可使探头门上升下降,以实现接近和远离蒸发器管板,提高探头定位精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。